技术特征:
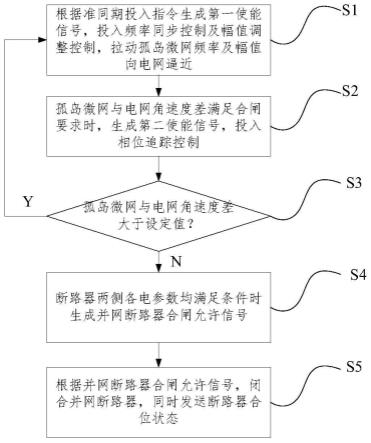
1.一种换流器孤岛转联网控制方法,其特征在于,包括步骤:s1、根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;s2、孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;s3、在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制,跳转至步骤s1的频率同步控制;否则执行步骤s4;s4、断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;s5、根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。2.根据权利要求1所述的方法,其特征在于,所述频率同步控制包括:对孤岛微网角速度ω
s
与电网角速度ω
g
的差值进行pi调节,输出有功功率参考补偿p
delta
。3.根据权利要求2所述的方法,其特征在于,所述步骤s2中,孤岛微网与电网角速度差满足合闸要求时,将所述频率同步控制中pi调节的输入置0并锁存该pi调节的输出。4.根据权利要求3所述的方法,其特征在于,所述幅值调整控制包括:对并网断路器孤岛侧电压幅值u
s
与并网断路器电网侧电压幅值u
g
的差值进行pi调节,输出无功功率参考补偿q
delta
。5.根据权利要求1-4中任意一项所述的方法,其特征在于,所述孤岛微网与电网角速度差的合闸要求包括:其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,δt1为连续满足上述条件ω
delta
<ω
set2
的时间长度,t1为设置的时间定值。6.根据权利要求5所述的方法,其特征在于,所述相位追踪控制包括:对并网断路器孤岛侧电压相位θ
s
与并网断路器电网侧电压相位θ
g
的差值进行pi调节,输出虚拟转子角速度补偿量ω
delta
'。7.根据权利要求6所述的方法,其特征在于,所述孤岛微网与电网角速度差大于设定值的条件包括:其中,ω
set1
为第一角度阈值,δt2为连续满足上述条件的时间长度,t2为设置的时间定值。8.根据权利要求7所述的方法,其特征在于,所述断路器两侧各电参数均满足条件包括:
其中,ω
delta
为孤岛微网与电网角速度差,ω
set2
为第二角度阈值,θ
set
为相位阈值,u
set
为幅值阈值,δt3为连续满足上述条件的时间长度,t3为设置的时间定值。9.根据权利要求8所述的方法,其特征在于,所述断路器合位状态使得第一使能信号和第二使能信号无效。10.一种换流器孤岛转联网控制装置,其特征在于,包括频率同步控制及幅值调整控制模块、相位追踪控制模块、调整模块、以及并网断路器合闸模块;其中,所述频率同步控制及幅值调整控制模块,根据准同期投入指令生成第一使能信号,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;所述相位追踪控制模块,用于当孤岛微网与电网角速度差满足合闸要求时,生成第二使能信号,投入相位追踪控制;所述调整模块,在相位追踪控制下,当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;所述并网断路器合闸模块,用于断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号;根据并网断路器合闸允许信号,闭合并网断路器,同时发送断路器合位状态。
技术总结
本发明实施例涉及一种换流器孤岛转联网控制方法及装置,该方法包括步骤:根据准同期投入指令,投入频率同步控制及幅值调整控制,拉动孤岛微网频率及幅值向电网逼近;孤岛微网与电网角速度差满足合闸要求时,投入相位追踪控制;当孤岛微网与电网角速度差大于设定值时,则控制第二使能信号无效,退出相位追踪控制;断路器两侧各电参数均满足条件时,生成并网断路器合闸允许信号,闭合并网断路器。本发明实施例将并网的相位同步拆分成频率同步和相位追踪两个阶段,以先同步频率再追踪相位的方式,降低了相位同步的难度,减少了调节过程中对系统的扰动;通过参考值的相加及退出时的平滑操作,过程中无模式切换,不会造成系统的阶跃和冲击。阶跃和冲击。阶跃和冲击。
技术研发人员:孙攀磊 李泰 荆雪记 鲁庆华 申帅华 彭忠 肖龙 李艳梅 苏进国 张艳浩 胡永昌 李玉龙 程晓磊 曹清易
受保护的技术使用者:许继集团有限公司
技术研发日:2022.04.19
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。