1.本发明涉及冗余驱动轮式机器人控制技术领域,具体涉及一种基于闭环数据驱动的冗余驱动轮式机器人协调控制方法。
背景技术:
2.冗余驱动的轮式移动机器人,其协调控制是提高整个系统运动性能的关键问题,对降低整车能耗,以及轮间内力损耗具有重要意义。冗余驱动的轮式机器人在运动时由于各轮与地面接触状态不同,同侧车轮间存在驱动配合问题,尤其在非结构化地形或野外环境中时,如果不加以控制极易产生内力损耗,进而消耗能量。同时系统存在的模型不确定性、控制不确定性等因素,会对协调优化的结果产生影响,导致协调规划效果出现偏差,进而使系统性能出现恶化。以保证机器人在室外运动时能够跟踪期望轨迹并且尽可能的降低能耗和内力损耗为主要目标,协调控制器的设计重点关注协调分配与不确定性考量的同时实现。
3.目前,国内外的冗余驱动机器人的协调控制研究并未将协调优化纳入到闭环控制中,难以应对系统不确定性对协调控制的影响,因此如何设计闭环协调控制框架,将协调优化的规划过程引入控制闭环,实现不确定性环境中冗余驱动轮式机器人的协调控制,降低能耗及内力损耗,是当前考虑不确定性的冗余驱动轮式机器人协调控制研究的一项挑战。
技术实现要素:
4.本发明为了克服以上技术的不足,提供了一种实现各车轮的控制输入的协调分配,降低同侧车轮之间的内力损耗的基于闭环数据驱动的冗余驱动轮式机器人协调控制方法。
5.本发明克服其技术问题所采用的技术方案是:
6.一种基于闭环数据驱动的冗余驱动轮式机器人协调控制方法,包括如下步骤:
7.a)基于力学分析建立冗余驱动轮式机器人的标称动力学模型其中q为冗余驱动轮式机器人在世界坐标系中的实际位置向量,q=(x,y,z),x为冗余驱动轮式机器人在世界坐标系中的x轴坐标,y为冗余驱动轮式机器人在世界坐标系中的y轴坐标,z为冗余驱动轮式机器人在世界坐标系中的z轴坐标,为q的一阶导数,为q的二阶导数,m为质量矩阵,为科氏力项,g(q)为重力项;
8.b)将控制输入指令u输入到标称动力学模型中,输出得到冗余驱动轮式机器人的理论位置,计算冗余驱动轮式机器人实际位置向量q与理论位置的误差,构建系统不确定性的概率预测模型;
9.c)将标称动力学模型与系统不确定性的概率预测模型相结合,得到冗余驱动轮式机器人系统的动力学概率预测模型ε为模型及控制不确定性的综合表示,ε服从于cnp,cnp为深度高斯过程学习系统建模,m为高斯函数的均值,k为高斯
函数的协方差函数;
10.d)建立带约束的协调控制优化函数j为优化目标函数求得的值,e
track
为状态跟踪误差,t为转置,pe、qf、pf及ks均为参数矩阵,fw为车轮控制输入,f
wi
为第i个车轮的控制输入,i∈{1,...,n},n为冗余驱动轮式机器人的车轮总数,f
wj
为第j个车轮的控制输入,j∈{1,...,n},s为车轮滑移率,a
eq
为等式约束的参数矩阵,b
eq
为平衡条件向量,a
ie
为不等式约束的参数矩阵,b
ie
为上限条件向量;
11.e)将满足j为最小值时的车轮控制输入fw作为控制输入期望值,将控制输入期望值通过基于tube的mpc控制算法计算得到驱动控制f
′w,利用驱动控制f
′w对冗余驱动轮式机器人进行控制,此时冗余驱动轮式机器人在世界坐标系中的实际位置向量为q
′
;
12.f)将f
′w作为控制输入指令,将q
′
作为冗余驱动轮式机器人在世界坐标系中的实际位置向量,重复执行步骤b)至步骤e);
13.g)循环执行步骤f),直至冗余驱动轮式机器人在世界坐标系中的实际位置向量跟踪上控制输入期望值。
14.进一步的,步骤a)中基于牛顿第二定律及动量定理对冗余驱动轮式机器人进行受力分析,建立冗余驱动轮式机器人的标称动力学模型。
15.进一步的,步骤b)中将误差值与控制输入指令u组成训练数据,利用深度高斯过程学习系统建模与控制的不确定性,构建系统不确定性的概率预测模型。本发明的有益效果是:通过构建闭环数据驱动优化框架,将模型学习、协调优化与驱动控制纳入到同一闭环框架中,基于标称动力学模型和实际数据构建包含不确定性的动力学模型,利用数据驱动模型实时更新动力学模型、协调优化问题的约束条件及不变tube的计算,有效降低不确定性对协调优化过程的影响,降低控制方法的保守性,实现各车轮的控制输入的协调分配,降低同侧车轮之间的内力损耗。
附图说明
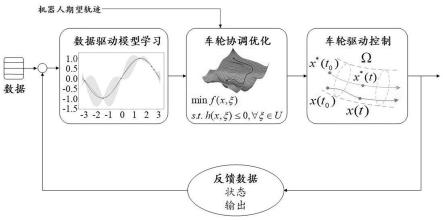
16.图1为本发明的闭环数据驱动优化框架结构的示意图。
具体实施方式
17.下面结合附图1对本发明做进一步说明。
18.一种基于闭环数据驱动的冗余驱动轮式机器人协调控制方法,包括如下步骤:
19.a)基于力学分析建立冗余驱动轮式机器人的标称动力学模型其中q为冗余驱动轮式机器人在世界坐标系中的实际位置向量,q=(x,y,z),x为冗余驱动轮式机器人在世界坐标系中的x轴坐标,y为冗余驱动轮式机器人在世界坐标系中的y轴坐标,z为冗余驱动轮式机器人在世界坐标系中的z轴坐标,为q的
一阶导数,为q的二阶导数,m为质量矩阵,为科氏力项,g(q)为重力项。
20.b)将控制输入指令u输入到标称动力学模型中,输出得到冗余驱动轮式机器人的理论位置,计算冗余驱动轮式机器人实际位置向量q与理论位置的误差,构建系统不确定性的概率预测模型。
21.c)将标称动力学模型与系统不确定性的概率预测模型相结合,得到冗余驱动轮式机器人系统的动力学概率预测模型ε为模型及控制不确定性的综合表示,ε服从于cnp,cnp为深度高斯过程学习系统建模,m为高斯函数的均值,k为高斯函数的协方差函数。
22.d)建立带约束的协调控制优化函数j为优化目标函数求得的值,e
track
为状态跟踪误差,t为转置,pe、qf、pf及ks均为参数矩阵,fw为车轮控制输入,f
wi
为第i个车轮的控制输入,i∈{1,...,n},n为冗余驱动轮式机器人的车轮总数,f
wj
为第j个车轮的控制输入,j∈{1,...,n},s为车轮滑移率,a
eq
为等式约束的参数矩阵,b
eq
为平衡条件向量,a
ie
为不等式约束的参数矩阵,b
ie
为上限条件向量。
23.e)将满足j为最小值时的车轮控制输入fw作为控制输入期望值,将控制输入期望值通过基于tube的mpc控制算法计算得到驱动控制f
′w,利用驱动控制f
′w对冗余驱动轮式机器人进行控制,此时冗余驱动轮式机器人在世界坐标系中的实际位置向量为q
′
。
24.f)将f
′w作为控制输入指令,将q
′
作为冗余驱动轮式机器人在世界坐标系中的实际位置向量,重复执行步骤b)至步骤e)。
25.g)循环执行步骤f),直至冗余驱动轮式机器人在世界坐标系中的实际位置向量跟踪上控制输入期望值。
26.实施例1:
27.步骤a)中基于牛顿第二定律及动量定理对冗余驱动轮式机器人进行受力分析,建立冗余驱动轮式机器人的标称动力学模型。
28.通过构建闭环数据驱动优化框架,将模型学习、协调优化与驱动控制纳入到同一闭环框架中,基于标称动力学模型和实际数据构建包含不确定性的动力学模型,利用数据驱动模型实时更新动力学模型、协调优化问题的约束条件及不变tube的计算,有效降低不确定性对协调优化过程的影响,降低控制方法的保守性,实现各车轮的控制输入的协调分配,降低同侧车轮之间的内力损耗。
29.实施例2:
30.步骤b)中将误差值与控制输入指令u组成训练数据,利用深度高斯过程学习系统建模与控制的不确定性,构建系统不确定性的概率预测模型。
31.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
