技术特征:
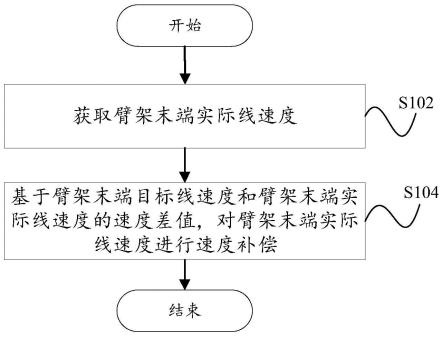
1.一种臂架回转控制方法,其特征在于,包括:获取臂架末端实际线速度;基于臂架末端目标线速度和所述臂架末端实际线速度的速度差值,对所述臂架末端实际线速度进行速度补偿。2.根据权利要求1所述的臂架回转控制方法,其特征在于,所述基于臂架末端目标线速度和所述臂架末端实际线速度的速度差值,对所述臂架末端实际线速度进行速度补偿步骤包括:获取所述臂架末端目标线速度;计算所述臂架末端目标线速度和所述臂架末端实际线速度的速度差值;基于所述速度差值对臂架回转台的转速进行pid反馈调节,直到所述臂架末端实际线速度与所述臂架末端目标线速度相同。3.根据权利要求1所述的臂架回转控制方法,其特征在于,获取所述臂架末端目标线速度的步骤包括:获取操作手柄的张开角度;基于所述操作手柄的张开角度与所述线速度之间的关系确定出所述臂架末端的目标线速度。4.根据权利要求2所述的臂架回转控制方法,其特征在于,所述臂架回转台包括臂架回转马达,所述基于所述速度差值对臂架回转台的转速进行pid反馈调节步骤包括:基于所述速度差值控制所述臂架回转马达的供油量,以对所述臂架回转台的转速进行pid反馈调节。5.根据权利要求1至4中任一项所述的臂架回转控制方法,其特征在于,所述获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度;根据回转台角速度和所述臂架末端当前位置信息计算出臂架末端的实际线速度。6.根据权利要求5所述的臂架回转控制方法,其特征在于,所述获取臂架末端当前位置信息的步骤包括:获取臂架末端与所述回转台回转中心线的距离,所述臂架末端与所述回转台回转中心线的距离即为所述臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度计算出所述臂架末端当前位置信息。7.一种臂架回转控制装置,其特征在于,包括:第一获取模块,用于获取臂架末端实际线速度;控制模块,用于基于臂架末端目标线速度和所述臂架末端实际线速度的速度差值,对所述臂架末端实际线速度进行速度补偿。8.一种可读存储介质,其上存储有程序或指令,其特征在于,所述程序或所述指令被执行时,实现如权利要求1至6中任一项所述的臂架回转控制方法的步骤。9.一种臂架系统,其特征在于,回转台;第一传感器,对应所述回转台设置,用于测量所述回转台的角速度;
臂架组件,设置在所述回转台上,所述回转台能够带动所述臂架组件进行转动,所述臂架组件包括至少一个臂节,多个所述臂架之间转动连接;位置信息确定装置,设置在所述臂架组件上,用于确定臂架末端当前位置信息;如权利要求7所述的臂架回转控制装置,所述臂架回转控制装置与所述回转台、所述第一传感器和所述位置信息确定装置分别连接,或如权利要求8所述的可读存储介质。10.根据权利要求9所述的臂架系统,其特征在于,还包括:臂架回转马达,用于驱动所述回转台转动;所述位置信息确定装置包括第二传感器组,设置在所述臂架组件上,用于测量所述臂架的所有臂节角度。11.一种车辆,其特征在于,包括如权利要求9或10所述的臂架系统。
技术总结
本发明提供了一种臂架回转控制方法、装置、可读存储介质、系统和车辆,臂架回转控制方法包括:获取臂架末端实际线速度;基于臂架末端目标线速度和臂架末端实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。本申请通过对臂架末端目标线速度和臂架末端的实际线速度的速度差值进行补偿,进而控制臂架的回转台转动,形成闭环控制回路,并能够进行反馈调节,使得臂架旋转时更加的平顺,不同的操作人员进行操作时,也能够达到相同的旋转速度,简化了操作手的旋转操控要求,且相比于现有方案还解决了臂架电流设置过小引起的臂架回转不动作问题。回转不动作问题。回转不动作问题。
技术研发人员:张铁桥 丁园
受保护的技术使用者:三一汽车制造有限公司
技术研发日:2022.04.15
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。