1.本发明属于塔吊领域,尤其涉及一种自动顶升塔机结构。
背景技术:
2.塔式起重机(tower crane)简称塔机,起源于西欧。动臂装在高耸塔身上部的旋转起重机。作业空间大,主要用于房屋建筑施工中物料的垂直和水平输送及建筑构件的安装。由金属结构、工作机构和电气系统三部分组成。金属结构包括塔身、动臂和底座等。工作机构有起升、变幅、回转和行走四部分。
3.塔机在使用中需顶升装置对其进行提升加高操作,操作中需要工人在顶升平台上进行先顶升架内前拉塔节和用螺栓固定等辅助操作,效率较低。在顶升架高前还需要工人配合对起重小车位置进行调节,使得塔架平衡,此过程繁琐费时。在平衡调节前还需要将顶升架上的16个导轮与塔节之间的间隙调试至2毫米至5毫米,否则在顶升时极易出现因塔节出产外形不精确或变形导致的卡死而增加液压缸的提升阻力。另外,由于导轮与塔节之间具有间隙,所以在顶升过程中会因调节平衡不到位而产生晃动。
4.顶升前的调节平衡及导轮与塔节之间的间隙调节需要严格按照操作规程执行,对于塔机的智能无人化顶升而言,其效率较低。
5.本发明设计一种自动顶升塔机结构解决如上问题,为后续智能化无人化操作提供技术支撑。
技术实现要素:
6.为解决现有技术中的所述缺陷,本发明公开一种自动顶升塔机结构,它是采用以下技术方案来实现的。
7.在本发明的描述中需要说明的是,术语“内”、“外”、“上”、“下”等指示方位或者位置关系为基于附图所示的方位或者位置关系,或者是该发明产品使用时惯常摆放的方位或者位置关系,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造或操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
8.一种自动顶升塔机结构,它包括固装于塔机回转台下端的顶升架、液压缸a、推板、外套、内杆、弹簧a、导轮、导座、限位杆a、电动推杆a、塔节、卡板、电动推杆b、上顶机构,其中嵌套于塔节的顶升架上安装有两个对称分布于平台两侧且水平伸缩的液压缸a,两个液压缸a末端安装有将通过起重小车吊至平台的塔节水平牵拉入顶升架内的推板;顶升架上铰接有两个对称分布于平台两侧用来将回转台向上顶升且能有效限制顶升架相对于塔节摆动的上顶机构;上顶机构被顶升架上的电动推杆a驱动进行摆动并与塔节上相应两个卡板的卡槽配合;顶升架与塔节之间具有在顶升架被顶升二分之一塔节高度时防止顶升架相对于塔节下降的结构。
9.顶升架的内侧安装有两层外套,每层中具有对称的八个外套;每个外套中均沿与
顶升架侧面垂直的方向滑动有内杆并安装有对内杆运动复位的弹簧a,内杆末端安装有与顶升架侧壁相抵的导轮;每个内杆壁面上的限位槽a均对应配合有限位杆a,限位杆a竖直滑动于顶升架上导座的滑槽a内,每个限位杆a均与相对导轮所在内杆传动连接;塔节与回转台之间及塔节与塔节之间均通过被顶升架上电动推杆b驱动的特定锁结构进行锁紧固定,此结构通过人工方式解锁。
10.在顶升过程中,相对的两个导轮所受的作用力会因其所经塔节外形尺寸的突增而同时增大,相应两个内杆因同时发生微小收缩而分别带动与之传动连接的限位杆a瞬间解除对相应内杆的收缩限制,使得相对两个导轮因越过塔节上的外形尺寸变大部位而不会发生卡死;当顶升架因平衡臂与起重臂不平衡而相对于塔节摆动时,受力增大的导轮所在的内杆的微小收缩会带动相对导轮对应的限位杆a解除对相应内杆的收缩限制并有效限制顶升架相对于塔节的大幅摆动。
11.作为本技术的进一步改进,所述限位杆a上的齿牙与相应导座中安装的齿轮b啮合,齿轮b所在轴上安装的齿轮a与相对内杆上安装的齿条啮合;内杆上对称安装有两个导向块a,两个导向块a分别滑动于相应外套内壁的两个导向槽a内;弹簧a为压缩弹簧。导向块a与导向槽a的配合对内杆在外套中的滑动发挥导向作用。
12.作为本技术的进一步改进,所述上顶机构包括液压缸b、扁担梁、顶销、顶板、弹簧b,其中上端与顶升架球铰连接且相互平行的两个液压缸b的末端铰接有扁担梁,扁担梁的两端对称安装有两个与塔节上卡板的卡槽配合的圆柱顶销;扁担梁中部具有与相应电动推杆a配合的顶板;两个液压缸b之间安装有限制两者间距变化的高弹性系数弹簧b;弹簧b为压缩弹簧。
13.作为本技术的进一步改进,所述内杆通过导杆与相应齿条固连,导杆水平滑动于顶套上的导轨内。齿轮a与相应齿轮b的分度圆直径比小于1,保证内杆在其发生极微小位移时即可以通过一系列传动带动相应限位杆a快速脱离相对导轮对应的内杆上的限位槽a。
14.作为本技术的进一步改进,所述顶升架内侧通过摆销铰接安装有上下两层总共八个卡块,每个摆销上均嵌套有对相应卡块摆动复位的涡簧;顶升架上安装有八个与卡块一一对应配合且用来阻止卡块由水平状态上摆的限摆块;卡块与塔节上相应的支撑块配合。
15.作为本技术的进一步改进,所述回转台的下端或塔节的下端均具有四个对称的固定块a,塔节的上端具有四个与其上固定块a一一对应的固定块b;每个固定块b上的滑槽b内均水平滑动有滑杆,滑杆上嵌套有对其复位的弹簧c;滑槽b内壁的滑槽c内竖直滑动有滑套,滑套内竖直滑动有与相应滑杆上限位槽b配合的限位杆b并安装有对限位杆b复位的弹簧d;滑槽c底部的螺纹孔内旋合有与滑套旋转配合的螺杆,螺杆末端具有手动旋钮;滑杆a上的两个楔形锁块分别与上方相邻塔节或回转台上相应固定块a的两个楔形锁槽配合。
16.作为本技术的进一步改进,所述弹簧c和弹簧d均为压缩弹簧;弹簧c位于相应滑槽b内壁的环槽内;弹簧c一端与环槽内壁连接,另一端与相应滑杆上安装的压簧环连接;对称安装于限位杆b上的两个导向块b分别滑动于相应滑套内壁的两个导向槽b内。导向块b与导向槽b的配合对限位杆b在滑套内的滑动发挥导向作用的同时保证通过手动旋动螺杆可以带动限位杆b脱离滑杆上的限位槽b,以实现手动解除限位杆b对滑杆的限制。
17.相对于传统的塔吊顶升结构,本发明中的两个液压缸a通过推板可以将起重小车吊装至平台上的塔节自动牵拉进顶升架内,并且在塔节牵拉进顶升架内后通过电动推杆b
推动相应锁块插入相应固定块a上的锁槽将塔节进行紧固锁定,同时,液压缸b在其对回转台的顶升过程中的往复摆动由电动推杆a完成,实现了一定程度的无人化,为后续塔机的智能化无人化操作提供有效的技术支撑。
18.本发明中的16个导轮因任意相对两个导轮所在伸缩结构之间的传动连接配合始终保持与塔节的紧贴,无需在顶升前对导轮与塔节之间进行间隙调节,节省工序,效率较高。任意相对两个导轮所在伸缩结构之间的传动连接配合会有效阻止回转台在抬升过程中相对于塔身塔节因平衡臂与起重臂不平衡而产生的晃动,同时,任意相对两个导轮所在伸缩结构之间的传动连接配合在顶升过程中保证出产外形不精确或变形的塔节不会与导轮发生卡死,从而实现塔吊的有效加高顶升。
19.本发明在顶升前无需通过人工对塔身进行精确调节平衡,且无需对导轮与塔节之间的间隙进行调节,减小工序的同时有效提高顶升效率。
20.本发明结构简单,具有较好的使用效果。
21.附图说明
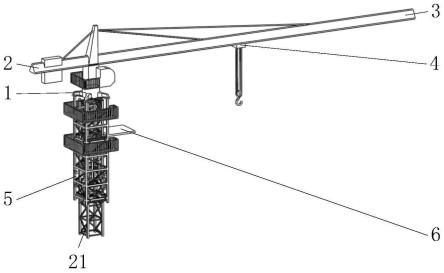
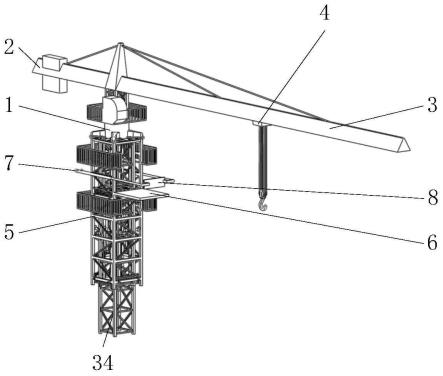
22.图1是塔吊示意图。
23.图2是顶升架及塔节配合剖面示意图。
24.图3是顶升架上同一层八个导轮与塔节配合剖面示意图。
25.图4是顶升架上相对两个导轮与塔节配合剖面示意图。
26.图5是顶升架、伸缩结构、导轮及塔节配合剖面示意图。
27.图6是顶升架、液压缸a、推杆及塔节配合剖面示意图。
28.图7是相邻两个塔节配合剖面示意图。
29.图8是塔节及回转台配合剖面示意图。
30.图9是塔节两侧液压缸b分布示意图。
31.图10是顶升架、成对液压缸b、扁担梁及塔节配合示意图。
32.图11是顶升架、摆轴、卡块、支撑块及塔节配合剖面示意图。
33.图12是塔节及其两个局部剖面示意图。
34.图13是相对两个伸缩结构之间的传动配合剖面示意图。
35.图14是成对液压缸b及扁担梁示意图。
36.图15是导座示意图。
37.图16是螺杆、滑套、限位杆b及滑杆配合剖面示意图。
38.图中标号名称:1、回转台;2、平衡臂;3、起重臂;4、起重小车;5、顶升架;6、平台;7、液压缸a;8、推板;9、上顶机构;10、外套;11、导向槽a;12、内杆;13、限位槽a;14、导向块a;15、弹簧a;16、导轮;17、导座;18、滑槽a;19、限位杆a;20、齿轮b;21、齿轮a;22、齿条;23、导杆;24、摆轴;25、卡块;26、涡簧;27、限摆块;28、液压缸b;29、扁担梁;30、顶销;31、顶板;32、弹簧b;33、电动推杆a;34、塔节;35、支撑块;36、卡板;37、固定块a;38、锁槽;39、固定块b;40、滑槽b;41、环槽;42、滑槽c;43、螺纹孔;44、滑杆;45、弹簧c;46、压簧环;47、锁块;48、滑套;49、导向槽b;50、限位杆b;51、导向块b;52、弹簧d;53、螺杆;54、电动推杆b;55、限位槽b。
39.具体实施方式
40.附图均为本发明实施的示意图,以便于理解结构运行原理。具体产品结构及比例尺寸根据使用环境结合常规技术确定即可。
41.如图1、2、3所示,它包括固装于塔机回转台1下端的顶升架5、液压缸a7、推板8、外套10、内杆12、弹簧a15、导轮16、导座17、限位杆a19、电动推杆a33、塔节34、卡板36、电动推杆b54、上顶机构9,其中如图1、6所示,嵌套于塔节34的顶升架5上安装有两个对称分布于平台6两侧且水平伸缩的液压缸a7,两个液压缸a7末端安装有将通过起重小车4吊至平台6的塔节34水平牵拉入顶升架5内的推板8;如图9、10、14所示,顶升架5上铰接有两个对称分布于平台6两侧用来将回转台1向上顶升且能有效限制顶升架5相对于塔节34摆动的上顶机构9;如图9、10、12所示,上顶机构9被顶升架5上的电动推杆a33驱动进行摆动并与塔节34上相应两个卡板36的卡槽配合;如图10、11、12所示,顶升架5与塔节34之间具有在顶升架5被顶升二分之一塔节34高度时防止顶升架5相对于塔节34下降的结构。
42.如图2、3、4所示,顶升架5的内侧安装有两层外套10,每层中具有对称的八个外套10;如图5、13、15所示,每个外套10中均沿与顶升架5侧面垂直的方向滑动有内杆12并安装有对内杆12运动复位的弹簧a15,内杆12末端安装有与顶升架5侧壁相抵的导轮16;每个内杆12壁面上的限位槽a13均对应配合有限位杆a19,限位杆a19竖直滑动于顶升架5上导座17的滑槽a18内,每个限位杆a19均与相对导轮16所在内杆12传动连接;如图7、8、16所示,塔节34与回转台1之间及塔节34与塔节34之间均通过被顶升架5上电动推杆b54驱动的特定锁结构进行锁紧固定,此结构通过人工方式解锁。
43.如图4、13所示,在顶升过程中,相对的两个导轮16所受的作用力会因其所经塔节34外形尺寸的突增而同时增大,相应两个内杆12因同时发生微小收缩而分别带动与之传动连接的限位杆a19瞬间解除对相应内杆12的收缩限制,使得相对两个导轮16因越过塔节34上的外形尺寸变大部位而不会发生卡死;当顶升架5因平衡臂2与起重臂3不平衡而相对于塔节34摆动时,受力增大的导轮16所在的内杆12的微小收缩会带动相对导轮16对应的限位杆a19解除对相应内杆12的收缩限制并有效限制顶升架5相对于塔节34的大幅摆动。
44.如图5、13所示,所述限位杆a19上的齿牙与相应导座17中安装的齿轮b20啮合,齿轮b20所在轴上安装的齿轮a21与相对内杆12上安装的齿条22啮合;内杆12上对称安装有两个导向块a14,两个导向块a14分别滑动于相应外套10内壁的两个导向槽a11内;弹簧a15为压缩弹簧。导向块a14与导向槽a11的配合对内杆12在外套10中的滑动发挥导向作用。
45.如图10、12、14所示,所述上顶机构9包括液压缸b28、扁担梁29、顶销30、顶板31、弹簧b32,其中上端与顶升架5球铰连接且相互平行的两个液压缸b28的末端铰接有扁担梁29,扁担梁29的两端对称安装有两个与塔节34上卡板36的卡槽配合的圆柱顶销30;扁担梁29中部具有与相应电动推杆a33配合的顶板31;两个液压缸b28之间安装有限制两者间距变化的高弹性系数弹簧b32;弹簧b32为压缩弹簧。
46.如图13所示,所述内杆12通过导杆23与相应齿条22固连,导杆23水平滑动于顶套上的导轨内。齿轮a21与相应齿轮b20的分度圆直径比小于1,保证内杆12在其发生极微小位移时即可以通过一系列传动带动相应限位杆a19快速脱离相对导轮16对应的内杆12上的限
位槽a13。
47.如图10、11、12所示,所述顶升架5内侧通过摆销铰接安装有上下两层总共八个卡块25,每个摆销上均嵌套有对相应卡块25摆动复位的涡簧26;顶升架5上安装有八个与卡块25一一对应配合且用来阻止卡块25由水平状态上摆的限摆块27;卡块25与塔节34上相应的支撑块35配合。
48.如图8、12、16所示,所述回转台1的下端或塔节34的下端均具有四个对称的固定块a37,塔节34的上端具有四个与其上固定块a37一一对应的固定块b39;每个固定块b39上的滑槽b40内均水平滑动有滑杆44,滑杆44上嵌套有对其复位的弹簧c45;滑槽b40内壁的滑槽c42内竖直滑动有滑套48,滑套48内竖直滑动有与相应滑杆44上限位槽b55配合的限位杆b50并安装有对限位杆b50复位的弹簧d52;滑槽c42底部的螺纹孔43内旋合有与滑套48旋转配合的螺杆53,螺杆53末端具有手动旋钮;滑杆44a上的两个楔形锁块47分别与上方相邻塔节34或回转台1上相应固定块a37的两个楔形锁槽38配合。楔形锁槽38与楔形锁块47的配合保证锁块47能够紧紧插入锁槽38内而不发生晃动,保证回转台1与塔节34或塔节34与塔节34之间的紧锁固定。
49.如图16所示,所述弹簧c45和弹簧d52均为压缩弹簧;弹簧c45位于相应滑槽b40内壁的环槽41内;弹簧c45一端与环槽41内壁连接,另一端与相应滑杆44上安装的压簧环46连接;对称安装于限位杆b50上的两个导向块b51分别滑动于相应滑套48内壁的两个导向槽b49内。导向块b51与导向槽b49的配合对限位杆b50在滑套48内的滑动发挥导向作用的同时保证通过手动旋动螺杆53可以带动限位杆b50脱离滑杆44上的限位槽b55,以实现手动解除限位杆b50对滑杆44的限制。
50.本发明中的电动推杆a33、电动推杆b54、液压缸a7及液压缸b28均采用现有技术。
51.本发明的工作流程:在初始状态,回转台1与塔节34之间处于锁定状态,任意相邻两个塔节34之间均处于锁定状态,锁块47紧紧插于相应锁槽38内,限位杆b50插入相应滑杆44上的限位槽b55内,弹簧c45和弹簧d52均为压缩状态,全部电动推杆b54均处于收缩状态。每个上顶机构9中的扁担梁29处于下垂状态,扁担梁29上的顶销30脱离塔节34上卡板36的卡槽,液压缸b28处于最短收缩状态,两个电动推杆a33均处于收缩状态。八个卡块25均搭接于某个塔节34上的相应支撑块35上,涡簧26处于压缩状态。两个液压缸a7均处于最短收缩状态,推板8与顶端塔节34侧面相抵。16个导轮16均与塔节34侧壁相抵且全部弹簧a15产生的弹力相等,全部限位杆a19均插入相应内杆12上的限位槽a13内。
52.当需要对塔身进行顶升加高时,先驱动两个液压缸a7伸长至极限长度,使得推杆距离顶升架5侧壁的距离能够容纳下一个塔节34。同时启动两个电动推杆a33,两个电动推杆a33分别推动相应上顶机构9中扁担梁29上的两个顶销30向相应卡板36上的卡槽方向运动,同时启动两个上顶机构9中的液压缸b28进行伸长,使得两个上顶机构9中的顶销30分别进入相应卡板36上的卡槽内,启动电动推杆a33回缩至初始状态。
53.然后,对回转台1与塔节34之间进行解锁,手动依次旋动顶端塔节34上的四个螺杆53,螺杆53通过相应滑套48和导向块b51带动限位杆b50脱离相应滑杆44上的限位槽b55,滑杆44在相应弹簧c45作用下带动相应两个锁块47瞬间弹出相应固定块a37上的两个锁槽38并完成对回转台1与塔节34之间的解锁。在解锁后,反向旋动解锁后的螺杆53,使得螺杆53带动相应限位杆b50与相应滑杆44侧壁相抵,弹簧d52被进一步压缩。
54.待回转台1与塔节34之间完成解锁后,启动两个上顶机构9中的液压缸b28进行伸长,使得顶升架5相对于塔节34竖直向上运动,每个卡块25均脱离相应支撑块35,十六个导轮16在塔节34作用下产生旋转以减小顶升架5的上升阻力。
55.当顶升架5上升二分之一塔节34高度时,每个卡块25重新与新的支撑块35相遇并经相应支撑块35的作用而下摆后在相应涡簧26复位作用下上摆越过支撑块35。此时,开始收缩上顶机构9中的液压缸b28,顶升架5回落微小距离因卡块25搭接于支撑块35上而停止运动。在液压缸b28回缩过程中,上顶机构9中的顶销30脱离卡板36上卡槽,液压杆b带动扁担梁29重新回归下垂状态。当液压缸b28回缩至二分之一左右塔节34长度时恢复初始状态,上顶机构9的扁担梁29上的两个顶销30与新的卡板36相对,此时,启动两个电动推杆a33和液压缸b28同时伸长,两个电动推杆a33再次分别将相应上顶机构9中的扁担梁29摆向新的卡板36。当顶销30进入卡板36上的卡槽内时回缩电动推杆a33至初始状态。随着液压缸b28的继续伸长,顶升架5再次相对塔节34向上竖直运动。
56.当顶升架5再次上升二分之一塔节34高度时,每个卡块25重新与新的支撑块35相遇并经相应支撑块35的作用而下摆后在相应涡簧26复位作用下上摆越过支撑块35。此时,再次收缩上顶机构9中的液压缸b28,顶升架5回落微小距离后因卡块25搭接于支撑块35上而停止运动。在液压缸b28回缩过程中,上顶机构9中的顶销30脱离卡板36上卡槽,液压杆b带动扁担梁29重新再次回归下垂状态。
57.此时,回转台1与最顶端塔节34之间的距离刚好为一个塔节34高度,通过起重小车4将新的塔节34吊至平台6上并启动两个液压缸a7收缩,两个液压缸a7通过推板8带动平台6上的塔节34向回转台1下顶升架5内牵拉。
58.当平台6上的塔节34完全牵拉入顶升架5内与下方塔节34完全对接时,新塔节34上的固定块a37的锁槽38正好与下方塔节34上的相应锁块47相对,新塔节34上的锁块47正好与回转台1上相应固定块a37上的锁槽38相对。此时,驱动全部的电动推杆b54进行伸长,电动推杆b54推动相应滑杆44运动,滑杆44带动相应两个锁块47紧紧插入相应固定块a37的锁槽38内,限位杆b50在相应弹簧d52作用下瞬间插入滑杆44上的限位槽b55并完成对锁块47在锁槽38内的位置锁定,进而完成回转台1与新塔节34及新塔节34与下方塔节34的紧固。
59.在顶升过程中,如果塔顶上平衡臂2与起重臂3不处于平衡状态,那么顶升架5就会因力矩不平衡相对于塔节34具有摆动趋势,力矩小的一侧的导轮16受到塔节34的侧压力增大,力矩大的一侧的导轮16受到塔节34的侧压力减小。受力增大的导轮16带动相应内杆12向外套10内收缩微小距离后因限位杆a19在限位槽a13内运动达到极限而停止,运动的内杆12通过相应导杆23、齿条22、齿轮a21和齿轮b20带动相对一侧受力变小的导轮16所在的内杆12对应的限位杆a19快速脱离限位槽a13并解除受力变小的导轮16对应内杆12的运动限制。
60.受力增大侧导轮16对应内杆12在产生微小运动后停止运动并通过导轮16阻止顶升架5相对于塔节34的形成大幅度晃动,从而保证顶升架5在其对回转台1顶升时不会因前期未进行精确调平而相对于塔节34发生较大幅度晃动,在节省调平工序提升效率的同时实现有效顶升。
61.在顶升过程中,如果导轮16所经塔节34的外形尺寸发生突增,那么经过塔节34变大尺寸部位的导轮16通过顶升架5使得相对导轮16受到顶升架5的反作用,从而使得经过塔
节34变大尺寸部位的导轮16同与其相对的导轮16同时带动相应内杆12向外套10内收缩,两个导轮16所在的内杆12分别通过相应导杆23、齿条22、齿轮a21和齿轮b20带动相互对应的限位杆a19快速脱离相应限位槽a13并解除经过塔节34变大尺寸部位的导轮16同与其相对的导轮16两者所对应的两个内杆12的运动限制,使得经过塔节34变大尺寸部位的导轮16同与其相对的导轮16可以轻松越过塔节34变大尺寸部位而不形成卡死,从而实现塔吊的有效加高顶升。
62.综上所述,本发明的有益效果为:本发明中的两个液压缸a7通过推板8可以将起重小车4吊装至平台6上的塔节34自动牵拉进顶升架5内,并且在塔节34牵拉进顶升架5内后通过电动推杆b54推动相应锁块47插入相应固定块a37上的锁槽38将塔节34进行紧固锁定,同时,液压缸b28在其对回转台1的顶升过程中的往复摆动由电动推杆a33完成,实现了一定程度的无人化,为后续塔机的智能化无人化操作提供有效的技术支撑。
63.本发明中的16个导轮16因任意相对两个导轮16所在伸缩结构之间的传动连接配合始终保持与塔节34的紧贴,无需在顶升前对导轮16与塔节34之间进行间隙调节,节省工序,效率较高。任意相对两个导轮16所在伸缩结构之间的传动连接配合会有效阻止回转台1在抬升过程中相对于塔身塔节34因平衡臂2与起重臂3不平衡而产生的晃动,同时,任意相对两个导轮16所在伸缩结构之间的传动连接配合在顶升过程中保证出产外形不精确或变形的塔节34不会与导轮16发生卡死,从而实现塔吊的有效加高顶升。
64.本发明在顶升前无需通过人工对塔身进行精确调节平衡,且无需对导轮16与塔节34之间的间隙进行调节,减小工序的同时有效提高顶升效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。