一种叉车式agv沟壑检测系统及叉车式agv
技术领域
1.本实用新型涉及agv控制领域,尤其是涉及一种叉车式agv沟壑检测系统及叉车式agv。
背景技术:
2.agv为仓储用车,对于使用地面的要求很高,通过性不佳,因此当通过大型沟壑时,agv极易卡住,本发明旨在通过对于agv运动关系的分解,提出一种沟壑检测系统,可以帮助agv检测判断沟壑并实时停车,确保安全。
3.随着agv技术的发展,agv 的应用场景越来越多,在许多场景下,需要加入沟壑判断技术,比如在月台上进出卡车的agv,需要判断前方是否有大型沟壑。
4.目前类似的技术,已经在服务机器人领域应用,例如一种在中国专利文献上公开的“服务机器人和服务机器人系统”,其公开号为cn208812103u,但是该方案采用红外距离传感器组和超声波传感器,成本高,电气设计和程序编写复杂,且相关传感器容易损坏。
技术实现要素:
5.本实用新型是为了克服现有技术中,agv技术需要复杂的程序编写和电气设计,对控制器的运算性能要求较高而导致的成本过高,维护安装较为复杂等问题,提供一种叉车式agv沟壑检测系统及叉车式agv。
6.一种叉车式agv沟壑检测系统及叉车式agv,包括:
7.agv叉车主体,实现叉车功能;
8.驱动轮,驱动叉车移动;
9.从动轮,随驱动轮运动方向进行转向;
10.承载轮,承重、支撑叉车主体的货叉;
11.光电开关,检测地面光暗状态。
12.通过对于该叉车式agv的运动结构进行分解,该车有一个驱动轮,一个从动轮,两轮分别位于车头前部,两个承载轮,位于货叉方向,四个轮子的安装位置相互距离较远,稳定整体车辆的重心,提高该方案下agv叉车工作状态的稳定性,以及检测到沟壑后瞬间停下时,保证agv车体不会摇晃导致危险状况的发生。
13.作为优选,光电开关均匀设置在所述agv叉车主体底部的六个方向上,其中,4个光电开关设置在agv叉车主体车头后部,2个光电开关设置在货叉承载轮的前方;即光电开关设置在驱动轮、从动轮、承载轮相对位置的车体底部外侧,使得在运动过程中,光电开关在车轮运动到沟壑前检测到沟壑并及时关闭车体运动状态,防止沟壑对车轮和车体造成损坏,通过6个方向的光电开关直接控制检测到沟壑后的车体启停,大大减少了检测模块的使用成本,且安装简单,有利于后续损坏零件的更新维护和产品迭代。
14.作为优选,光电开关均垂直于水平地面安装,光电开关的检测端与地面的垂直距离为6cm,将光电开关垂直地面安装能提高检测精度,让沟壑检测在该检测系统下能得到更
准确的反馈,将光电开关的检测距离与地面保持4cm,在不影响正常使用和减少光电开关磕碰的情况下,能提高检测的准确性。
15.作为优选,驱动轮和从动轮的运动角度为正负90度,正负90度即可满足所有运动方向的执行,减少控制器的运算性能,从而降低车体成本。
16.因此,本实用新型具有以下有益效果:
17.通过六个光电开关的安装位置实时监测地面情况,防止沟壑对车轮和车体造成损坏,大大减少了检测模块的安装使用成本,利于后续损坏零件的更新维护和产品迭代;
18.垂直安装光电开关,且将光电开关检测端与地面保持6cm,在不影响正常使用和减少光电开关磕碰的情况下,能提高检测的准确性;
19.驱动轮和从动轮的运动角度为正负90度,正负90度即可满足所有运动方向的执行,减少控制器的运算性能,从而降低车体成本。
附图说明
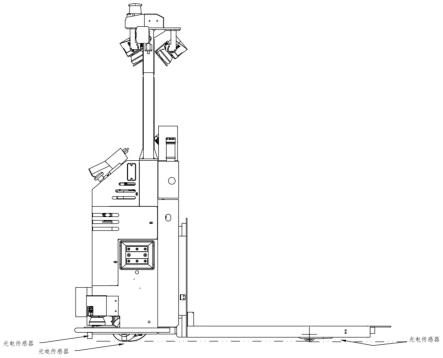
20.图1是本实用新型的侧面结构示意图;
21.图2是本实用新型的底面结构示意图;
22.图3是本实用新型的控制逻辑示意图。
23.其中,1.从动轮;2.驱动轮;3.承载轮。
具体实施方式
24.下面将结合附图和具体实施方式,对本实用新型做进一步具体的描述。
25.如图1、图2所示,一种叉车式agv沟壑检测系统及叉车式agv,包括:
26.agv叉车主体,实现叉车功能;
27.驱动轮2,驱动叉车移动;
28.从动轮1,随驱动轮运动方向进行转向;
29.承载轮3,承重、支撑叉车主体的货叉;
30.光电开关,检测地面光暗状态。
31.通过对于该叉车式agv的运动结构进行分解,该车有一个驱动轮2,一个从动轮1,两轮分别位于车头前部,两个承载轮3,位于货叉方向,四个轮子的安装位置相互距离较远,稳定整体车辆的重心,提高该方案下agv叉车工作状态的稳定性,以及检测到沟壑后瞬间停下时,保证agv车体不会摇晃导致危险状况的发生。
32.光电开关均匀设置在所述agv叉车主体底部的六个方向上,其中,4个光电开关设置在agv叉车主体车头后部,2个光电开关设置在货叉承载轮的前方;即光电开关设置在驱动轮、从动轮、承载轮相对位置的车体底部外侧,使得在运动过程中,光电开关在车轮运动到沟壑前检测到沟壑并及时关闭车体运动状态,防止沟壑对车轮和车体造成损坏,通过6个方向的光电开关直接控制检测到沟壑后的车体启停,大大减少了检测模块的使用成本,且安装简单,有利于后续损坏零件的更新维护和产品迭代。
33.光电开关均垂直于水平地面安装,光电开关的检测端与地面的垂直距离为4cm,将光电开关垂直地面安装能提高检测精度,让沟壑检测在该检测系统下能得到更准确的反馈,将光电开关的检测距离与地面保持4cm,在不影响正常使用和减少光电开关磕碰的情况
下,能提高检测的准确性。
34.根据车辆工况和结构特点的分析,我们可以得出,agv运动中心为承载轮连线的中点;前两个轮子的运动角度为正负90度,后两个轮子的运动角度为0,是从动轮;该agv除了前进后退,另一种极端运动状态就是原地转弯,该状态下前方两个轮子分别为90度,因此,设计6个光电开关就可以完全覆盖agv轮子的运动方向。因为,除了轮子前进和后退方向以外,在增加两个前轮的90度和-90度方向上的检测;检测通过光电开关,光电开关垂直安装于地面,并设定好检测估计触发距离,正常情况下,六个光电开关全部触发,一旦有一个光电开关没有触发,就有卡入沟壑或跌落的风险,因此,只要一个或一个以上没有触发,agv即通过控制器下达急停命令,车辆停机。
35.驱动轮和从动轮的运动角度为正负90度,正负90度即可满足所有运动方向的执行,减少控制器的运算性能,从而降低车体成本。
36.如图3所示,本实用新型的控制步骤包括:
37.步骤s1:光电开关对车体即将经过的路面进行扫描;
38.步骤s2:当光电开关检测到沟壑或地面不平整程度较高的地面时,发送急停指令信号到控制器;
39.步骤s3:车体控制器接收急停指令信号,将叉车主体停下;
40.步骤s4:待光电开关重新检测到正常地面时,叉车结束急停指令,重置指令输入,等待进一步人工指令输入。
41.上述过程简单且对控制器的性能要求低,成本低廉,控制方式简单。
42.以上依据图式所示的实施例详细说明了本实用新型的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
