技术特征:
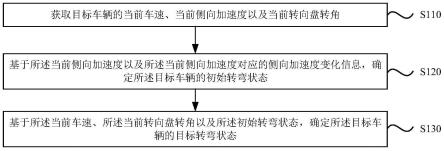
1.一种车辆转弯状态确定方法,其特征在于,包括:获取目标车辆的当前车速、当前侧向加速度以及当前转向盘转角;基于所述当前侧向加速度以及所述当前侧向加速度对应的侧向加速度变化信息,确定所述目标车辆的初始转弯状态;基于所述当前车速、所述当前转向盘转角以及所述初始转弯状态,确定所述目标车辆的目标转弯状态。2.根据权利要求1所述的方法,其特征在于,所述基于所述当前车速、所述当前转向盘转角以及所述初始转弯状态,确定所述目标车辆的目标转弯状态,包括:基于所述当前车速以及所述当前转向盘转角确定所述目标车辆对应的转角类型,基于所述当前车速,以及与所述当前转向盘转角对应的转向盘转角速度,确定所述目标车辆对应的转角速度类型;基于所述转角类型、所述转角速度类型以及所述初始转弯状态,确定所述目标车辆的目标转弯状态。3.根据权利要求2所述的方法,其特征在于,所述基于所述当前车速以及所述当前转向盘转角确定所述目标车辆对应的转角类型,基于所述当前车速,以及与所述当前转向盘转角对应的转向盘转角速度,确定所述目标车辆对应的转角速度类型,包括:基于所述当前车速确定所述目标车辆对应的第一转角阈值、第二转角阈值、第一转角速度阈值和第二转角速度阈值;基于所述当前转向盘转角、所述第一转角阈值以及所述第二转角阈值,确定所述目标车辆对应的转角类型;确定与所述当前转向盘转角对应的转向盘转角速度,基于所述转向盘转角速度、所述第一转角速度阈值以及所述第二转角速度阈值,确定所述目标车辆对应的转角速度类型。4.根据权利要求2所述的方法,其特征在于,所述转角类型包括小转角类型、中等转角类型和大转角类型,所述转角速度类型包括小转角速度类型、中等转角速度类型和大转角速度类型,所述基于所述转角类型、所述转角速度类型以及所述初始转弯状态,确定所述目标车辆的目标转弯状态,包括:若所述转角类型为大转角类型或所述转角速度类型为大转角速度类型,则基于初始转弯状态确定所述目标车辆的目标转弯状态;或者,若所述转角类型为中等转角类型,且所述转角速度类型为中等转角速度类型,则基于初始转弯状态确定所述目标车辆的目标转弯状态。5.根据权利要求4所述的方法,其特征在于,所述基于所述转角类型、所述转角速度类型以及所述初始转弯状态,确定所述目标车辆的目标转弯状态,还包括:若所述转角类型为小转角类型,且所述转角速度类型为小转角速度类型或中等转角速度类型,则确定所述目标车辆的目标转弯状态为车辆稳态转向状态;或者,若所述转角类型为中转角类型,且所述转角速度类型为小转角速度类型,则确定所述目标车辆的目标转弯状态为车辆稳态转向状态。6.根据权利要求1所述的方法,其特征在于,所述基于所述当前侧向加速度以及所述当前侧向加速度对应的侧向加速度变化信息,确定所述目标车辆的初始转弯状态,包括:确定所述当前侧向加速度的方向信息、所述侧向加速度变化信息的方向信息以及所述
侧向加速度变化信息对应的当前取值;基于各所述方向信息以及所述当前取值确定所述目标车辆的初始转弯状态。7.根据权利要求6所述的方法,其特征在于,所述基于各所述方向信息以及所述当前取值确定所述目标车辆的初始转弯状态,包括:若所述当前数值不为零,且所述当前侧向加速度的方向信息与所述侧向加速度变化信息的方向信息相反,则确定所述目标车辆的初始转弯状态为车辆出弯状态;若所述当前数值不为零,且所述当前侧向加速度的方向信息与所述侧向加速度变化信息的方向信息相同,则确定所述目标车辆的初始转弯状态为车辆入弯状态;若所述当前数值为零,则确定所述目标车辆的初始转弯状态为车辆稳态转向状态。8.一种车辆转弯状态确定装置,其特征在于,包括:获取模块,用于获取目标车辆的当前车速、当前侧向加速度以及当前转向盘转角;第一确定模块,用于基于所述当前侧向加速度以及所述当前侧向加速度对应的侧向加速度变化信息,确定所述目标车辆的初始转弯状态;第二确定模块,用于基于所述当前车速、所述当前转向盘转角以及所述初始转弯状态,确定所述目标车辆的目标转弯状态。9.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-7中任一项所述的车辆转弯状态确定方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的车辆转弯状态确定方法。
技术总结
本发明公开了一种车辆转弯状态确定方法、装置、电子设备及存储介质。该方法通过获取目标车辆的当前车速、当前侧向加速度以及当前转向盘转角,根据当前侧向加速度和当前侧向加速度对应的侧向加速度变化信息,确定初始转弯状态,实现对车辆转弯状态的初步判断,进一步的,根据当前车速、当前转向盘转角和初始转弯状态确定目标转弯状态,实现对车辆转弯状态的确认,该方法综合考虑车速、侧向加速度以及转向盘转角进行车辆转弯状态的识别,判断结果更为准确,且抗干扰能力更强。并且,该方法所需的车速、侧向加速度以及转向盘转角均可从车辆现有装置上获取,无需增加额外的传感器,识别成本较低。较低。较低。
技术研发人员:董明涛 苗为为 李论 蒋永峰 郝文权
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2022.04.13
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。