技术特征:
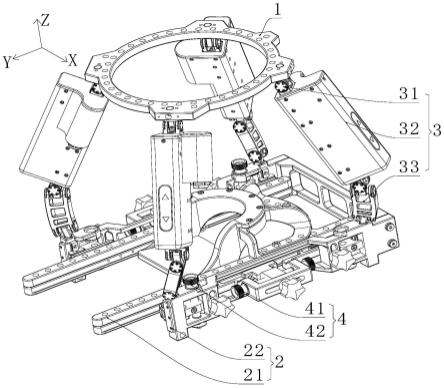
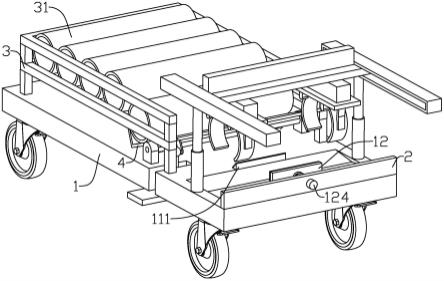
1.一种踝关节辅助复位康复机器人,其特征在于,包括静平台(1)、动平台(2)、多条支链(3)及调整机构(4),所述动平台(2)包括相互连接的内环支架(21)和外环支架(22),所述静平台(1)及所述内环支架(21)分别用于固定胫骨和足部,所述支链(3)的一端与所述静平台(1)连接,所述支链(3)的另一端与所述外环支架(22)连接,所述调整机构(4)设于所述内环支架(21)与所述外环支架(22)之间,所述调整机构(4)用于调整所述外环支架(22)与所述内环支架(21)的相对位置。2.根据权利要求1所述的踝关节辅助复位康复机器人,其特征在于,所述调整机构(4)包括竖向调节结构(42)和纵向调节结构(41),所述纵向调节结构(41)用于调整所述外环支架(22)与所述内环支架(21)的纵向相对位置,所述竖向调节结构(42)用于调整所述外环支架(22)与所述内环支架(21)的竖向相对位置。3.根据权利要求2所述的踝关节辅助复位康复机器人,其特征在于,所述外环支架(22)包括第一支架(221)、第二支架(222)及第三支架(223),所述内环支架(21)安装在所述第一支架(221)上,所述第一支架(221)的一侧设有相互连接的所述第二支架(222)和所述第三支架(223),所述第一支架(221)与所述第二支架(222)之间设有所述纵向调节结构(41),所述第二支架(222)与所述第三支架(223)之间设有所述竖向调节结构(42),所述第三支架(223)与所述支链(3)连接。4.根据权利要求3所述的踝关节辅助复位康复机器人,其特征在于,所述纵向调节结构(41)包括轨道(411)、第一梯形丝杠(412)、第一调节旋钮(413)及第一锁紧旋钮(414),所述第一梯形丝杠(412)包括第一丝杆和第一丝母,所述第二支架(222)通过所述轨道(411)与所述第一支架(221)滑动连接,所述第一丝杆纵向穿过所述第二支架(222)并在两端连接所述第一调节旋钮(413),所述第一丝母套设在所述第一丝杆上并与所述第一支架(221)固定,所述第一锁紧旋钮(414)用于将所述第二支架(222)与所述第一丝母锁紧。5.根据权利要求3所述的踝关节辅助复位康复机器人,其特征在于,所述竖向调节结构(42)包括第二梯形丝杠(421)、第二调节旋钮(422)及第二锁紧旋钮(423),所述第二梯形丝杠(421)包括第二丝杆和第二丝母,所述第二梯形丝杆竖向穿过所述第三支架(223),所述第二丝杆的一端连接所述第二调节旋钮(422),所述第二丝母套设在所述第二丝杆上并与所述第二支架(222)固定,所述第二锁紧旋钮(423)用于将所述第三支架(223)与所述第二支架(222)锁紧。6.根据权利要求1所述的踝关节辅助复位康复机器人,其特征在于,所述支链(3)包括第一铰链(31)、伸缩杆(32)及第二铰链(33),所述伸缩杆(32)的一端通过所述第一铰链(31)与所述静平台(1)连接,所述伸缩杆(32)的另一端通过所述第二铰链(33)与所述外环支架(22)连接,所述伸缩杆(32)适于伸缩以带动所述动平台(2)向靠近或远离所述静平台(1)方向运动。7.根据权利要求6所述的踝关节辅助复位康复机器人,其特征在于,所述支链(3)设有四根,各所述支链(3)的所述第一铰链(31)分布在正方形的四个顶点上,各所述支链(3)的所述第二铰链(33)分布在长方形的四个顶点上。8.根据权利要求6所述的踝关节辅助复位康复机器人,其特征在于,所述第一铰链(31)包括第一铰体(311)、第二铰体(312)及第一转轴(313),所述第一铰体(311)的一端与所述静平台(1)连接,所述第一铰体(311)的另一端通过所述第一转轴(313)连接与所述第二铰
体(312)转动连接,所述第二铰体(312)连接所述伸缩杆(32)。9.根据权利要求8所述的踝关节辅助复位康复机器人,其特征在于,所述第二铰链(33)包括第三铰体(331)、第四铰体(332)、偏置虎克铰连接块(333)、第二转轴(334)、第三转轴(335)及第四转轴(336),所述第三铰体(331)的一端与所述伸缩杆(32)连接,所述第三铰体(331)的另一端通过所述第二转轴(334)与所述偏置虎克铰连接块(333)连接,所述第二转轴(334)的轴线与所述第一转轴(313)的轴线相互平行,所述偏置虎克铰连接块(333)通过所述第三转轴(335)与所述第四铰体(332)的一端转动连接,所述第三转轴(335)的轴线与所述第二转轴(334)的轴线相对垂直,所述第四铰体(332)的另一端通过所述第四转轴(336)与所述外环支架(22)连接。10.根据权利要求9所述的踝关节辅助复位康复机器人,其特征在于,所述第四铰体(332)呈弧形结构,所述第三转轴(335)和所述第四转轴(336)沿弧形方向设置,所述第三转轴(335)的轴线和所述第四转轴(336)的轴线相交于所述踝关节辅助复位康复机器人的旋转中心。
技术总结
本发明提供了一种踝关节辅助复位康复机器人,涉及机器人技术领域,所述踝关节辅助复位康复机器人包括静平台、动平台、多条支链及调整机构,动平台包括相互连接的内环支架和外环支架,静平台及内环支架分别用于固定胫骨和足部,支链的一端与静平台连接,支链的另一端与外环支架连接,调整机构设于内环支架与外环支架之间,调整机构用于调整外环支架与内环支架的相对位置。本发明的技术方案,患者的足部、胫骨分别与动平台的内环支架及静平台连接,支链带动动平台的外环支架以相对静平台旋转,动平台的旋转中心由外环支架及支链共同决定,通过调整机构调节外环支架及支链的位置,使得旋转中心与踝关节中心相重合,完成对不同患者踝关节尺寸的适配。关节尺寸的适配。关节尺寸的适配。
技术研发人员:于洪建 杜志江 孙社稷 王浩 沈祥宇
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.05.10
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。