一种集成式so2交叉干扰补偿装置
技术领域
1.本实用新型涉及环境监测设备领域,尤其涉及一种集成式so2交叉干扰补偿装置。
背景技术:
2.红外光谱法、定电位电解法烟气分析仪已广泛应用于固定污染源烟气测试。多年来,经过观察和资料查询获悉,当烟气中存在ch4、 nh3、h2s气体时,对so2测试会产生不同程度干扰,导致测试数据失真,给生态环境管理部门的决策造成困扰。
3.目前,红外光谱分析仪检测so2时采用单一波长,通过带通滤光片实现有效波长(7.3μm)光通量,其光通量的衰减对应so2的浓度。考虑增强通光量的吸收强度,滤光片的半宽会增加宽度,若其他未知气体在该宽度的波长上也有吸收,将对so2的检测带来干扰,导致测试结果出现偏差。定电位电解法传感器在复杂烟气中也存在着严重的交叉干扰现象,虽传感器出厂时均提供了相关干扰的提示数据,但该数据范围较宽泛,烟气分析仪生产厂家对该提示性数据的应用明显不足,导致so2数据干扰现象较为普遍。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种集成式so2交叉干扰补偿装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种集成式so2交叉干扰补偿装置,包括ch4气体检测传感器、h2s、nh3气体检测传感器,所述ch4气体检测传感器包括第一气体池,所述第一气体池的外表面设置有步进电机,所述步进电机的输出端固定连接有输出轴,所述步进电机输出轴的另一端固定连接有调制轮,所述第一气体池的外表面设置有红外光源,所述第一气体池的一侧内壁固定安装有第二凹面镜、第三凹面镜,所述第一气体池的另一侧内壁固定安装有第一凹面镜,所述第一气体池的输入端固定连接有第一进气口,所述第一气体池的输出端固定连接有第一排气口,所述ch4 气体检测传感器的外部设置有红外探测器;
7.所述h2s、nh3气体检测传感器包括第二气体池,所述第二气体池的外表面设置有氙灯光源模组、光谱仪模组,所述第二气体池的一侧固定安装有光纤准直器、光纤聚焦器,所述氙灯光源模组的输出端固定连接有光纤,所述第二气体池的一侧内壁固定安装有第四凹面镜,所述第二气体池的另一侧内壁固定安装有第五凹面镜、第六凹面镜,所述第二气体池的输入端固定连接有第二进气口,所述第二气体池的输出端固定连接有第二排气口,所述h2s、nh3气体检测传感器的外部设置有中控cpu模组、交叉干扰算法处理器。
8.优选的,所述第一气体池的外壁固定安装有窗片,所述窗片与调制轮相互对应,所述调制轮与红外光源相互对应。
9.优选的,所述氙灯光源模组的输出端与光纤准直器的输入端均通过光纤相连接,所述光谱仪模组的输入端与光纤聚焦器的输出端均通过光纤相连接。
10.优选的,所述第二凹面镜、第三凹面镜的尺寸大小小于第一凹面镜的尺寸大小,所
述第五凹面镜、第六凹面镜的尺寸大小小于第四凹面镜的尺寸大小。
11.优选的,所述红外光源与第一角反射镜相互对应,所述第二角反射镜与红外探测器相互对应。
12.优选的,所述h2s、nh3气体检测传感器的内部固定安装有气体池加热片。
13.优选的,所述氙灯光源模组包括外壳,所述外壳的内部固定安装有氙灯光,所述外壳的内部固定安装有光源驱动板。
14.优选的,所述光谱仪模组包括保温盒,所述保温盒的内部固定安装有光谱仪加热片,所述保温盒的内部固定安装有光谱仪。
15.优选的,所述中控cpu模组与交叉干扰算法处理器电性连接,所述光谱仪、红外探测器均与交叉干扰算法处理器电性连接。
16.本实用新型的有益效果为:
17.本实用新型中,通过ch4气体检测传感器采用红外气体相关滤波法与h2s、nh3气体检测传感器采用紫外光谱吸收法相结合的方法,分别对ch4、nh3、h2s气体的精确检测,结合模型计算,实现对so2检测中的交叉干扰进行有效补偿,从而消除烟气中存在ch4、nh3、h2s气体时,对so2测试会产生不同程度干扰,能够大幅提升固定污染源复杂烟气中so2测试的准确性。
附图说明
18.图1为本实用新型的一种集成式so2交叉干扰补偿装置的ch4气体检测传感器的结构示意图。
19.图2为本实用新型的一种集成式so2交叉干扰补偿装置的h2s、 nh3气体检测传感器的结构示意图。
20.图3为本实用新型的一种集成式so2交叉干扰补偿装置的氙灯光源模组的结构示意图。
21.图4为本实用新型的一种集成式so2交叉干扰补偿装置的光谱仪模组的结构示意图。
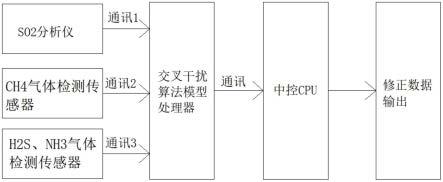
22.图5为本实用新型的一种集成式so2交叉干扰补偿装置的ch4气体检测传感器、h2s、nh3气体检测传感器、中控cpu模组、交叉干扰算法处理器、连接关系流程图。
23.图6为本实用新型的一种集成式so2交叉干扰补偿装置的软件流程图。
24.图中标号:1、ch4气体检测传感器;101、第一气体池;102、步进电机;103、调制轮;104、红外光源;105、窗片;106、第一角反射镜;107、第二角反射镜;108、第一凹面镜;109、第二凹面镜;110、第三凹面镜;111、第一进气口;112、第一排气口;113、红外探测器;2、h2s、nh3气体检测传感器;201、第二气体池;202、氙灯光源模组;20201、外壳;20202、光源驱动板;20203、氙灯光; 203、光纤;204、光纤准直器;205、光纤聚焦器;206、第二进气口; 207、第二排气口;208、第四凹面镜;209、第五凹面镜;210、第六凹面镜;211、气体池加热片;212、光谱仪模组;21201、保温盒; 21202、光谱仪;21203、光谱仪加热片;3、中控cpu模组;4、交叉干扰算法处理器。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
26.实施例一:
27.如附图1至附图4所示:
28.一种集成式so2交叉干扰补偿装置,包括ch4气体检测传感器1、 h2s、nh3气体检测传感器2,ch4气体检测传感器1包括第一气体池101,第一气体池101的外表面设置有步进电机102,步进电机102的输出端固定连接有输出轴,步进电机102输出轴的另一端固定连接有调制轮103,第一气体池101的外表面设置有红外光源104,第一气体池 101的一侧内壁固定安装有第二凹面镜109、第三凹面镜110,第一气体池101的另一侧内壁固定安装有第一凹面镜108,第一气体池101 的输入端固定连接有第一进气口111,第一气体池101的输出端固定连接有第一排气口112,ch4气体检测传感器1的外部设置有红外探测器113;
29.h2s、nh3气体检测传感器2包括第二气体池201,第二气体池201 的外表面设置有氙灯光源模组202、光谱仪模组212,第二气体池201 的一侧固定安装有光纤准直器204、光纤聚焦器205,氙灯光源模组 202的输出端固定连接有光纤203,第二气体池201的一侧内壁固定安装有第四凹面镜208,第二气体池201的另一侧内壁固定安装有第五凹面镜209、第六凹面镜210,第二气体池201的输入端固定连接有第二进气口206,第二气体池201的输出端固定连接有第二排气口 207,h2s、nh3气体检测传感器2的外部设置有中控cpu模组3、交叉干扰算法处理器4。
30.其中:
31.ch4气体检测传感器1的外壁固定安装有窗片105,窗片105与调制轮103相互对应,调制轮103与红外光源104相互对应,红外光源 104发射的光线通过调制轮103、窗片105进入第一气体池101的内部。
32.氙灯光源模组202的输出端与光纤准直器204的输入端均通过光纤203相连接,光谱仪模组212的输入端与光纤聚焦器205的输出端均通过光纤203相连接。
33.第二凹面镜109、第三凹面镜110的尺寸大小小于第一凹面镜108 的尺寸大小,第五凹面镜209、第六凹面镜210的尺寸大小小于第四凹面镜208的尺寸大小。
34.红外光源104与第一角反射镜106相互对应,第二角反射镜107 与红外探测器113相互对应,红外光源104发射的光线通过第一角反射镜106进行折射,第一气体池101内的光线通过第二角反射镜107 折射至第一气体池101外部,通过红外探测器113对光线进行接收。
35.其中:
36.h2s、nh3气体检测传感器2的内部固定安装有气体池加热片211,通过气体池加热片211提高第二气体池201内的温度,利用高温气路避免nh3在第二气体池201中的冷凝吸附提升检测的准确性,完成紫外高温气体检测装置,实现h2s和nh3气体测量。
37.氙灯光源模组202包括外壳20201,外壳20201的内部固定安装有氙灯光20203,外壳20201的内部固定安装有光源驱动板20202,光源驱动板20202对氙灯光20203提供电源和光源频率的调制。
38.光谱仪模组212包括保温盒21201,保温盒21201的内部固定安装有光谱仪加热片21203,保温盒21201的内部固定安装有光谱仪21202光谱仪加热片21203对光谱仪21202进行加热,从而保证保温盒21201内的温度处于恒温状态,以提高光谱仪加热片21203检测的准确性,保温盒21201为铝制材料。
39.中控cpu模组3与交叉干扰算法处理器4电性连接,光谱仪 21202、红外探测器113均与交叉干扰算法处理器4电性连接,通过交叉干扰算法处理器4。
40.实施例二:
41.采用独立的红外气体相关滤波法与紫外光谱吸收法相结合完成一套装置,实现ch4、nh3以及h2s气体的精确检测,通过数学模型实现so2测试中交叉干扰的补偿,提升固定污染源中so2的精确检测。
42.交叉干扰补偿算法:
43.1、目标气体主要吸收波长λ1,干扰气体主要吸收波长λ2,干扰气体在λ1处也略有吸收;λ2处目标气体无吸收,因此目标气体不会对干扰气体产生交叉干扰;λ1处干扰气体有吸收,因此干扰气体会对目标气体产生交叉干扰。
44.2、前提假设:
45.(1)目标气体浓度为零,随着干扰气体浓度上升,目标气体传感器读数也会上升。
46.(2)干扰气体浓度一定时,目标气体浓度越大,目标气体传感器读数误差越小。
47.(3)干扰气体浓度一定时,目标气体浓度与其传感器的读数呈现线性关系。
48.3、设计全面试验并获得标准表一
49.标准表一说明:符号x:(其中i=0,1,2....n),表示通入的混合气中目标气体的实际浓度值,符号y:(其中j=0,1,2.....表示通入的混合气中干扰气体的实际浓度值。表格第一格即x0行与y0列,对应的样本浓度组合为混合气中目标气体的浓度为x0,干扰气体的浓度为y0,一般将第一格对应的气体设为通入零气,std_x0y0则表示,此时在目标传感器上的读数值,其它的依次类推。
50.实际中,根据前提假设中的第(3)条假设,干扰气体浓度一定时,目标气体浓度与其传感器的读数呈现线性关系,只需要测试x0和xn所对应列的数据,便可以通过线性拟合插值得到其它列的数据。例如:拟合(x0,std_x0y0)和(xn,std_xny0)获得直线公司y=kx b,将插值点x1,x2,...,x
n-1
分别代入计算得到标准表中y0这一行所有的数值,其他行的数据依次类推得到。
51.表1:标准表一
[0052][0053]
4、标准表的校准
[0054]
校准表说明:
[0055]
x0y0表示通入零气时,目标气体传感器读数值。
[0056]
x0yn表示通入里程浓度纯干扰气时,目标气体传感器读数值。
[0057]
xny0表示通入童程浓度纯目标气时,目标气体传感器读数值。
[0058]
x
nyn
表示通入量程浓度目标气和童程浓度干扰气时,目标气体传感器读数值。
[0059]
表2:校准表
[0060][0061]
5、标准表二的获取
[0062]
(1)
△1=x0y
0-std_x0y0[0063]
k1=(x0yn
△1)/std_x0yn[0064]
将标准表的x0列分别与k1相乘得到新表的x0列。
[0065]
(2)
△2=x
ny0-std_xny0[0066]
k2=(x
nyn
△2)/std_x
nyn
[0067]
将标准表的xn列分别与kn相乘得到新表的xn列。
[0068]
(3)根据第(3)条假设,干扰气体浓度一定时,目标气体浓度与其传感器的读数呈现线性关系,通过线性拟合插值得到其它列的数据。例如:拟合(x0,k1×
std_x0y0)和(xn,k2×
std_xny0)获得直线公司 y=kx b,将插值点x1,x2,...,x
n-1
分别代入计算得到标准表中y0这一行所有的数值,其他行的数据依次类推得到。
[0069]
表3:标准表二
[0070][0071][0072]
6、计算扣除干扰气体后的目标气体浓度值
[0073]
表4:标准表三
[0074][0075][0076]
其中,干扰气体传感器读数cy,目标气体传感器读数c
x
。
[0077]
拟合(ya,std_x0ya)和(y
a 1
,std_x0y
a 1
),得y0=k0x b0,代入cy得到x0列的插值浓度c0。
[0078]
拟合(ya,std_xnya)和(y
a 1
,std_x
nya 1
),得yn=knx bn,代入cy得到xn列的插值浓度cn。
[0079]
拟合(x0,c0)和(xn,cn),得y=kx b,代入c
x
,计算得到扣除干扰之后的浓度值kc
x
b。
[0080]
实施例三:
[0081]
1、标定实验:
[0082]
第一步,先通入标定浓度的ch4气体,进行测量,经过多点标定实验之后,软件会对多点标定数据进行整理和分析得到一个ch4对so2交叉干扰模型。
[0083]
第二步,通入标定浓度的nh3气体同样进行第一步的实验,最后得到nh3对so2交叉干扰模型。
[0084]
第三步,通入标定浓度的h2s气体同样进行第一步的实验,最后得到h2s对so2交叉干扰模型。
[0085]
完成标定实验设备会生成一个ch4、nh3、h2s对so2交叉干扰模型。
[0086]
2、目标气体测量
[0087]
先通入未知浓度混合目标气体,进行测量。经过so2分析仪测量得到当前被干扰后so2的测量浓度,通过通讯口发送给此装置中的交叉干扰算法处理器4,此装置同时对未知浓度的混合气体中的ch4、 nh3、h2s的浓度分别进行检测。
[0088]
将得到的so2、ch4、nh3、h2s的测量浓度值带入到标定实验输出的ch4、nh3、h2s对so2交叉干扰模型中进行交叉干扰迭代,最后输出真实的so2浓度值。
[0089]
实施例四:
[0090]
实施例一的具体使用方式与作用:
[0091]
值得说明的是,so2分析仪的型号为gt-2000(so2),其配套电路也可由厂家提供,除此之外,本实用新型中涉及到的so2分析仪为现有技术,本领域技术人员完全可以实现,无需赘言,本实用新型保护的内容也不涉及对so2分析仪内部结构和工作原理的改进。
[0092]
本实用新型使用时,ch4气体检测传感器1与so2分析仪均为低温气路两者气路串联,h2s、nh3气体检测传感器为高温气路,h2s、nh3气体检测传感器与ch4气体检测传感器1与so2分析仪气路并联;
[0093]
当so2、ch4、nh3、h2s混合气体通入so2分析仪进行测试,得到 so2传感器对so2气体的示值数据并输入交叉干扰算法处理器4;
[0094]
然后so2、ch4、nh3、h2s混合气体通过第一进气口111进入第一气体池101内,通过第一排气口112排出,进而使得排气工作可以顺利进行,步进电机102启动,步进电机102带动调制轮103转动,通过调制轮103调制出待测气体的测量信号和参考信号,启动红外光源 104,红外光源104发射出红外光源,光线通过窗片105进入第一气体池101内,然后通过第一角反射镜106进行折射,在通过第一凹面镜108、第二凹面镜109、第三凹面镜110进行多次反射,最后通过第二角反射镜107照射至第一气体池101的外部,在通过第一气体池 101外部的红外探测器113接收,红外探测器113对气体进行检测,通过红外探测器113上检测测量信号和参考信号,在将采集的数据传输至交叉干扰算法处理器4;
[0095]
上述结构及过程请参阅图1。
[0096]
同时so2、ch4、nh3、h2s混合气体通过第二进气口206进入第二气体池201内,通过第二排气口207排出,进而使得排气工作可以顺利进行,气体池加热片211给通入第二气体池201内的气体加热到高温,利用高温气路避免nh3在第二气体池201中的冷凝吸附提升检测的准确性,光源驱动板20202对氙灯光20203提供电源和光源频率的调制,光源驱动板20202驱动氙灯光20203,氙灯光20203射出来的紫外光经过光纤203和光纤准直器204射入到第二
气体池201中,在通过第五凹面镜209、第六凹面镜210、第四凹面镜208多次反射后再经过光纤聚焦器205后由光纤203导入到光谱仪模组212内,同时光谱仪加热片21203对光谱仪21202进行加热,从而保证保温盒21201 内的温度处于恒温状态,以提高光谱仪加热片21203检测的准确性,在通过光谱仪21202采集数据,在将采集的数据传输至交叉干扰算法处理器4;
[0097]
上述结构及过程请参阅图2-4。
[0098]
将上述3组数据通讯到交叉干扰算法处理器4中,利用已建立的数学模型进行计算后传输送给6保存输出,即可得到修正后的so2气体浓度。
[0099]
上述结构及过程请参阅图5。
[0100]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0101]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0102]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
