1.本发明涉及避雷器技术领域,更具体地说是一种基于视觉模态分析的避雷器故障诊断系统及诊断方法。
背景技术:
2.氧化锌避雷器通流容量大、残压低、反应速度快、使用寿命长,能有效保护电力设备,广泛应用于电力系统的过电压保护。由于氧化锌避雷器有良好的非线性电阻特性,所以氧化锌避雷器内部是没有间隙的。正是由于没有间隙,在正常运行中阀片长期承受电力系统运行电压的作用,以及内部受潮或过热等因素的影响,因而会造成阀片非线性电阻特性的劣化。这种劣化的主要表现是正常电压下的阻性电流的增加,阻性电流的加大造成发热量的增加,避雷器内部温度的上升又加速阀片的老化,形成恶性循坏,最后导致氧化锌避雷器由于过热而损坏,严重时可能引起避雷器的爆炸,引起大面积停电事故。因此日常对氧化锌避雷器的日常巡检就显得尤为重要。
3.目前,电力行业对避雷器的巡检主要是依靠人工在现场目测其外观是否破损、用红外仪探测检测其发热温度等方式进行。这种巡检方式存在诸多缺点,包括:避雷器外部并未破损,仅在内部受潮或发热导致氧化锌阀片非线性特性破坏时,通过目测难以判断其是否损坏;而在采用红外仪探测其发热温度时,通常只有当避雷器损坏比较严重时,发热量才会激增,而在损坏初期避雷器的内部发热量并不大,因此,使用红外探测的方式存在巡检结果偏差。
技术实现要素:
4.本发明是为避免上述现有技术所存在的不足,提供一种基于视觉模态分析的避雷器故障诊断系统及诊断方法,以实现针对避雷器故障的安全、可靠的检测。
5.本发明为解决技术问题采用如下技术方案:
6.本发明基于视觉模态分析的避雷器故障诊断系统的特点是包括:
7.将避雷器携带预制标志物,用于辅助获取避雷器振动时的振动位移;
8.设置无人机模块,包括画面采集模块、数据处理模块、无线收发模块和飞行控制模块,所述画面采集模块包括携带在无人机上的两个具有固定视角用于获取避雷器振动画面的拍摄相机,在相机拍摄时能够实现悬浮拍摄和自动去抖;
9.设置远程遥控模块,包括数据处理模块、无线收发模块、显示模块和存储模块;所述远程遥控模块用于实现远距离操控无人机的飞行和画面拍摄,并利用所获取的画面针对避雷器进行模态分析,依据所述模态分析判断避雷器是否损坏。
10.本发明基于视觉模态分析的避雷器故障诊断系统的特点也在于:避雷器携带的所述预制标志物为烧制在避雷器陶瓷外壳表面的黑白散斑。
11.本发明基于视觉模态分析的避雷器故障诊断系统的避雷器故障诊断方法的特点是按如下步骤进行:
12.步骤1、操控无人机模块使其悬浮在避雷器的位置处;
13.步骤2、通过敲击避雷器的安装塔施加激励,使避雷器形成振动;
14.步骤3、利用无人机模块对避雷器进行拍摄,获得避雷器振动画面;
15.步骤4、在远程遥控模块上针对避雷器振动画面提取避雷器振动参数,根据所述避雷器振动参数计算获得避雷器模态参数,依据所述避雷器模态参数判断避雷器是否损坏。
16.本发明避雷器故障诊断方法的特点也在于:在由所述无人机模块根据所获得的避雷器振动画面中包括无人机模块当前运行状态和当前位置的信息,并将所述当前运行状态和当前位置的信息发送至远程遥控模块。
17.与已有技术相比,本发明有益效果体现在:
18.本发明实现了避雷器的健康状态判断、降低了操作难度、提高了检测的准确性,大大减轻了巡检人员的工作负担。
附图说明
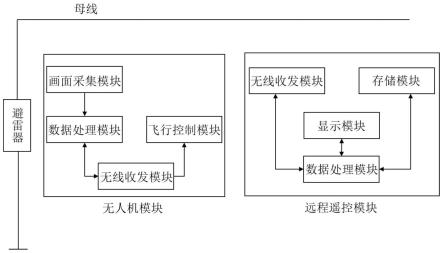
19.图1为本发明避雷器故障诊断系统框图。
具体实施方式
20.参见图1,本实施例中基于视觉模态分析的避雷器故障诊断系统包括:
21.将避雷器携带预制标志物,用于辅助获取避雷器振动时的振动位移,预制标志物为烧制在避雷器陶瓷外壳表面的黑白散斑。
22.设置无人机模块,包括画面采集模块、数据处理模块、无线收发模块和飞行控制模块,所述画面采集模块包括携带在无人机上的两个具有固定视角用于获取避雷器振动画面的拍摄相机,两个拍摄相机按照光轴汇聚模式进行摆放,使其可以拍摄到的画面具有重叠视场,在相机拍摄时能够实现悬浮拍摄和自动去抖。
23.无人机模块中的数据处理模块采用单片机或fpga,数据处理模块分别连接画面采集模块的输出端和无线收发模块,用于对画面采集模块输出的画面进行去抖,并将去抖后的画面传输到无线收发模块,进行发送。
24.无人机模块中的飞行控制模块用于控制无人机的飞行状态,包括上升、下降、悬停和前后左右,飞行控制模块接收无线收发模块的指令信号,并根据指令信号调整飞行轨迹。
25.设置远程遥控模块,包括数据处理模块、无线收发模块、显示模块和存储模块;所述远程遥控模块用于实现远距离操控无人机的飞行和画面拍摄,并利用所获取的画面针对避雷器进行模态分析,依据所述模态分析判断避雷器是否损坏。
26.远程遥控模块中的数据处理模块采用单片机或fpga,分别连接连接显示模块和无线收发模块,用于处理和保存在存储模块中的振动图像,首先对图像利用数字图像算法计算获得避雷器各特征点处的振动位移,再利用特征点处的振动位移利用模态分析法计算出避雷器的模态参数,并将计算获得的模态参数同存储模块保存的正常区间范围的模态参数进行对比,以此判断避雷器是否损坏,并将判断结果传输到显示模块进行显示,该模块连接显示模块和无线收发模块。
27.远程遥控模块中的显示模块采用液晶触摸显示屏,可以实现触摸操作,巡检员可以在触摸屏上通过触控操作实现指令的发送。
28.远程遥控模块中的存储模块采用tf卡,tf卡的大容量和高传输速度能够满足数据处理模块对该模块内部数据读写的操作,存储模块用来保存无人机模块传回的振动画面图像,以及保存避雷器正常工作时的模态参数范围。
29.无人机模块和远程遥控模块中的无线收发模块用于实现数据接收和发送以及两个模块之间的通信,采用rf76芯片来实现无线接收和发送功能,能够在2.4ghz频段实现数据的传输,能够满足图片传输时对高带宽的要求。其连接结构为数据处理模块的输出端连接无线收发模块。
30.本实施例中基于视觉模态分析的避雷器故障诊断系统的避雷器故障诊断方法按如下步骤进行:
31.步骤1、操控无人机模块使其悬浮在避雷器的位置处;
32.步骤2、通过敲击避雷器的安装塔施加激励,使避雷器形成振动;
33.步骤3、利用无人机模块对避雷器进行拍摄,获得避雷器振动画面;
34.步骤4、在远程遥控模块上针对避雷器振动画面提取避雷器振动参数,根据所述避雷器振动参数计算获得避雷器模态参数,依据所述避雷器模态参数判断避雷器是否损坏。
35.在由所述无人机模块根据所获得的避雷器振动画面中包括无人机模块当前运行状态和当前位置的信息,并将所述当前运行状态和当前位置的信息发送至远程遥控模块。
36.本实施例在无人机模块中,画面采集模块用于画面采集,利用两个固定视角的相机获取实时画面;数据处理模块负责对画面采集模块采集到的画面进行处理以及对无线收发模块接收到的信号进行处理;无线收发模块用于接收和发送数据,与远程遥控模块之间实现数据传递;飞行控制模块接收来自无线收发模块的块传出的飞行控制指令,根据指令调整无人机的飞行轨迹;在远程遥控模块中无线收发模块用于和无人机模块之间实现数据传递和通信;显示模块用于对数据处理模块计算的结果进行实时显示;存储模块用于保存数据处理的结果;数据处理模块负责处理无线收发模块接收的数据以及存储模块储存的数据,能够对捕获的振动画面利用数字图像相关法和模态分析算法计算出避雷器的模态参数,与存储模块中保存的模态参数正常范围进行对比,从而判断避雷器是否损坏。
37.本发明通过对避雷器振动过程中拍摄的振动画面进行模态分析,提取避雷器模态参数,进而通过对模态参数的分析判断避雷器是否损坏,有效地对氧化锌避雷器的运行状态进行监控,及时对故障和异常状态进行排查。
38.实际应用中,当远程遥控模块中显示模块上显示出无人机模块已经抵达预期的位置后,通过远程遥控模块上的无线收发模块发送指令使无人机悬停在设定高度。数据处理模块发出画面拍摄请求,经无线收发模块发送至远程遥控模块,远程遥控模块上的无线收发模块接收到画面拍摄请求后,经数据处理模块处理后传递到显示模块,巡检员在屏幕上操作同意后,远程遥控模块开始录制无人机模块传输来的画面,并实时将画面保存在存储模块中,此时使用力锤锤击避雷器的安装塔,避雷器受到激励后开始振动,待振动结束后,在远程遥控模块上停止画面拍摄,并发出指令使无人机降落。
39.显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。