1.本发明涉及五轴测量粗糙度技术领域,特别地,涉及一种五轴测量粗糙度中传感器的干涉检测方法。
背景技术:
2.航空发动机叶轮类、大型机匣等复杂形状零件具有结构复杂、型面空间扭曲、空间遮挡严重等特点,其曲面、内深孔的表面粗糙度检测用台式表面粗糙度检测仪受到叶片、孔壁等结构的干涉,无法检测到全部表面。例如,离心叶轮等整体叶轮叶盘的叶片型面、叶根转接处、流道等表面粗糙度要求为ra0.8,这些参数也是关系叶片性能的重要几何量参数之一,现在设计要求100%检测,目前在工序加工或排故过程中,受到叶片间隙小、曲率变化大等因素影响,其叶轮根部r和流道处的粗糙度在检测可达性上存在问题,缺乏合适的检测手段,没有数据支持,难以进行合理的质量跟踪和工序改进。另外,航空发动机大型复杂机匣有很多深孔表面有粗糙度要求,现有台式表面粗糙度检测仪受到固定式电感传感器长度和测量原理的限制只能测量孔口位置,无法深入测量,而加工中随着加工部位深入,表面性能变差,更需要进行检测。另外,现有还采用样板对比目视检测方法对复杂形状零件的曲面、深孔进行表面粗糙度检测,但是检测结果无法数字化输出,人为因素对测量结果影响大,而且零件深孔、轴承座安装处等部位由于视线影响,目视检测无法准确判断表面质量。
3.因此,为了对复杂形状零件的曲面、深孔进行表面粗糙度检测,需要研究五轴测量粗糙度技术的应用。目前,首要解决的是曲面及深孔表面和粗糙度传感器防干涉的问题,有利于实现计算机自动计算无干涉测量路径,提高粗糙度检测的效率和准确度。
技术实现要素:
4.本发明提供了一种五轴测量粗糙度中传感器的干涉检测方法,以解决五轴测量粗糙度中粗糙度传感器的干涉检测问题。
5.根据本发明的一个方面,提供一种五轴测量粗糙度中传感器的干涉检测方法,包括以下内容:
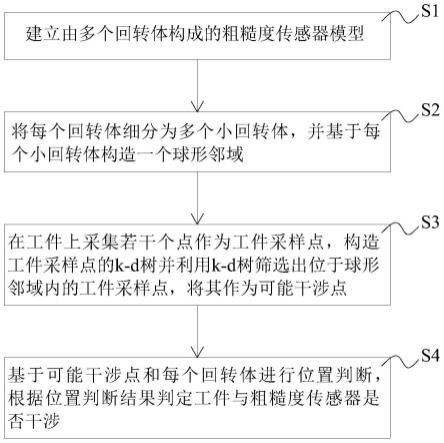
6.建立由多个回转体构成的粗糙度传感器模型;
7.将每个回转体细分为多个小回转体,并基于每个小回转体构造一个球形邻域;
8.在工件上采集若干个点作为工件采样点,构造工件采样点的k-d树并利用k-d树筛选出位于球形邻域内的工件采样点,将其作为可能干涉点;
9.基于可能干涉点和每个回转体进行位置判断,根据位置判断结果判定工件与粗糙度传感器是否干涉。
10.进一步地,所述建立由多个回转体构成的粗糙度传感器模型的过程包括以下内容:
11.将粗糙度传感器拆分为多个回转体,并确定每个回转体的空间方位和形状,以建立粗糙度传感器模型。
12.进一步地,所述确定每个回转体的空间方位和形状的过程具体为:
13.选择回转体的底面圆心或顶面圆心作为定位点,定义从定位点出发沿回转体轴线指向回转体内部的单位矢量为定位矢量,根据定位点的坐标和定位矢量确定回转体的空间方位,并定义定位点与回转体的某一正截面沿定位矢量方向的距离为该正截面的高度,则回转体的正截面半径与正截面高度构成函数关系,基于该函数关系确定回转体的形状。
14.进一步地,所述将每个回转体细分为多个小回转体,并基于每个小回转体构造一个球形邻域的过程具体为:
15.用垂直于回转体轴线的平面将回转体细分为多个小回转体,以小回转体的轴线中点作为球心、恰好包围整个小回转体作为目的构造球形邻域。
16.进一步地,所述基于可能干涉点和每个回转体进行位置判断的过程包括以下内容:
17.计算可能干涉点与回转体的定位点沿定位矢量方向的第一距离,将第一距离与回转体的高度进行比对,若第一距离小于零或者大于回转体的高度,则判定可能干涉点不在回转体内部。
18.进一步地,若第一距离大于等于零且小于等于回转体的高度,所述基于可能干涉点和每个回转体进行位置判断的过程还包括以下内容:
19.计算可能干涉点到回转体轴线的第二距离,将第二距离与回转体在第一距离位置处的正截面半径进行比对,若第二距离大于回转体在第一距离位置处的正截面半径,则判定可能干涉点不在回转体内部,否则判定可能干涉点在回转体内部。
20.进一步地,若所有可能干涉点均不在回转体内部,则工件与粗糙度传感器不干涉,否则存在干涉。
21.进一步地,回转体类型包括圆柱、圆锥、圆台、鼓形和球缺中的至少一种。
22.进一步地,小回转体的最大正截面直径与回转体的高度相当。
23.另外,本发明还提供一种五轴测量粗糙度中传感器的干涉检测系统,包括:
24.模型构建模块,用于建立由多个回转体构成的粗糙度传感器模型;
25.模型细分模块,用于将每个回转体细分为多个小回转体,并基于每个小回转体构造一个球形邻域;
26.筛选模块,用于获取若干个工件采样点,构造工件采样点的k-d树并利用k-d树筛选出位于球形邻域内的工件采样点,将其作为可能干涉点;
27.分析判断模块,用于基于可能干涉点和每个回转体进行位置判断,根据位置判断结果判定工件与粗糙度传感器是否干涉。
28.本发明具有以下效果:
29.本发明的五轴测量粗糙度中传感器的干涉检测方法,首先根据粗糙度传感器的外形特征用多个回转体进行建模,能够很好地反映粗糙度传感器的实际外形,然后将每个回转体细分为多个小回转体并构造球形邻域,以将粗糙度传感器模型划分为若干个球形邻域,再通过采集足够多的工件采样点来表示工件,通过构造工件采样点的k-d树快速筛选出可能干涉点,显著减少了干涉检测的运算量和计算时间,提高了检测效率,最后提出了一种点和回转体的干涉判断算法,可以准确地判断出粗糙度传感器与工件是否发生干涉,显著提高了五轴测量粗糙度中粗糙度传感器的干涉检测速度、精度,提升了传感器的抗干涉性,
并且具有普遍适用性,可以适用于复杂叶轮、机匣、长轴等复杂航空发动机零件测量表面曲率变化大、测量部位深等抗干涉要求高的表面粗糙度检测,并可以在汽车等其他领域机械零件的检测应用,具有很强的推广价值。
30.另外,本发明的五轴测量粗糙度中传感器的干涉检测系统同样具有上述优点。
31.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
32.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
33.图1是本发明优选实施例的五轴测量粗糙度中传感器的干涉检测方法的流程示意图。
34.图2是本发明优选实施例中将sfm-c2粗糙度传感器的测杆部分细分为18个圆柱体的示意图。
35.图3是本发明优选实施例中利用k-d树筛选可能干涉点的原理示意图。
36.图4是本发明优选实施例中基于可能干涉点和回转体进行干涉判断的原理示意图。
37.图5是本发明另一实施例的五轴测量粗糙度中传感器的干涉检测系统的模块结构示意图。
具体实施方式
38.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
39.如图1所示,本发明的优选实施例提供一种五轴测量粗糙度中传感器的干涉检测方法,包括以下内容:
40.步骤s1:建立由多个回转体构成的粗糙度传感器模型;
41.步骤s2:将每个回转体细分为多个小回转体,并基于每个小回转体构造一个球形邻域;
42.步骤s3:在工件上采集若干个点作为工件采样点,构造工件采样点的k-d树并利用k-d树筛选出位于球形邻域内的工件采样点,将其作为可能干涉点;
43.步骤s4:基于可能干涉点和每个回转体进行位置判断,根据位置判断结果判定工件与粗糙度传感器是否干涉。
44.可以理解,本实施例的五轴测量粗糙度中传感器的干涉检测方法,首先根据粗糙度传感器的外形特征用多个回转体进行建模,能够很好地反映粗糙度传感器的实际外形,然后将每个回转体细分为多个小回转体并构造球形邻域,以将粗糙度传感器模型划分为若干个球形邻域,再通过采集足够多的工件采样点来表示工件,通过构造工件采样点的k-d树快速筛选出可能干涉点,显著减少了干涉检测的运算量和计算时间,提高了检测效率,最后提出了一种点和回转体的干涉判断算法,可以准确地判断出粗糙度传感器与工件是否发生干涉,显著提高了五轴测量粗糙度中粗糙度传感器的干涉检测速度、精度,提升了传感器的
抗干涉性,并且具有普遍适用性,可以适用于复杂叶轮、机匣、长轴等复杂航空发动机零件测量表面曲率变化大、测量部位深等抗干涉要求高的表面粗糙度检测,并可以在汽车等其他领域机械零件的检测应用,具有很强的推广价值。
45.可以理解,在所述步骤s1中,根据粗糙度传感器的外形特征将其拆分为多个回转体,然后进行建模。可选地,回转体类型包括圆柱、圆锥、圆台、鼓形和球缺中的至少一种。例如,将雷尼绍sfm-c2粗糙度传感器拆分为圆柱,圆锥,圆台,鼓形和球缺等五种回转体类型,通过确定这些回转体的空间方位和形状,就能够实现sfm-c2粗糙度传感器的建模。具体地,所述步骤s1具体包括以下内容:
46.将粗糙度传感器拆分为多个回转体,并确定每个回转体的空间方位和形状,以建立粗糙度传感器模型。
47.其中,所述确定每个回转体的空间方位和形状的过程具体为:
48.选择回转体的底面圆心或顶面圆心作为定位点,定义从定位点出发沿回转体轴线指向回转体内部的单位矢量为定位矢量,根据定位点的坐标和定位矢量确定回转体的空间方位,并定义定位点与回转体的某一正截面沿定位矢量方向的距离为该正截面的高度,则回转体的正截面半径与正截面高度构成函数关系,基于该函数关系确定回转体的形状。其中,回转体的正截面半径与正截面高度构成的函数关系即为正截面半径函数。
49.可以理解,所述步骤s2具体为:
50.用垂直于回转体轴线的平面将回转体细分为多个小回转体,直至回转体全部用球形邻域构造为止,以小回转体的轴线中点作为球心、恰好包围整个小回转体作为目的构造球形邻域。
51.具体地,用垂直于回转体轴线的平面将每个回转体细分为更加匀称的小回转体,小回转体的最大正截面直径与回转体的高大致相等,再按照以下规则,构造小回转体的球形邻域:(1)球形邻域的球心是小回转体轴线的中点;(2)球形邻域能够恰好包围整个小回转体,直到将回转体全部用球形邻域构造为止。可以理解,球形邻域的半径根据小回转体的高度和最大正截面直径确定,一般取球心与回转体所有正截面圆周的距离中的最大值。
52.例如,如图2所示,将sfm-c2粗糙度传感器的测杆部分沿轴线方向细分或近似为18个圆柱体,细分后的圆柱体构造的球形邻域信息如表1所示。
53.表1、sfm-c2粗糙度传感器的测杆部分构造的球形邻域信息
54.[0055][0056]
可以理解,在所述步骤s3中,在工件上采集若干个点作为工件采样点,当工件采样点足够多时,就可以用工件采样点表示工件。然后,构造工件采样点的k-d树,利用k-d树能够快速筛选出所有在球形邻域内部的工件采样点,将这些点作为粗糙度传感器的可能干涉点pk,k=0,1,2,..,n,k为球形邻域内部工件采样点的编号,n为球形邻域内部工件采样点的数量。如图3所示,假设以点q为中心的球形邻域的半径为r,要找出位于该球形邻域内部的点,只需要以q为圆心,以r为半径作圆,判断k-d树的哪些超平面与圆相交,就可以快速筛选出可能位于球形邻域内部的可能干涉点。
[0057]
可以理解,所述步骤s4中基于可能干涉点和每个回转体进行位置判断的过程包括以下内容:
[0058]
计算可能干涉点与回转体的定位点沿定位矢量方向的第一距离,将第一距离与回转体的高度进行比对,若第一距离小于零或者大于回转体的高度,则判定可能干涉点不在回转体内部。
[0059]
若第一距离大于等于零且小于等于回转体的高度,所述基于可能干涉点和每个回转体进行位置判断的过程还包括以下内容:
[0060]
计算可能干涉点到回转体轴线的第二距离,将第二距离与回转体在第一距离位置
处的正截面半径进行比对,若第二距离大于回转体在第一距离位置处的正截面半径,则判定可能干涉点不在回转体内部,否则判定可能干涉点在回转体内部。
[0061]
具体地,如图4所示,计算可能干涉点pk与回转体c的定位点oc沿定位矢量nc的第一距离l
p
:
[0062]
l
p
=ocpk*nc[0063]
假设回转体c的高度为hc,若l
p
<0或者l
p
>hc,则判定可能干涉点pk不在回转体c内部,可能干涉点pk与回转体c不干涉。
[0064]
若0≤l
p
≤hc,再计算可能干涉点pk到回转体c轴线的第二距离d
p
:
[0065]dp
=|ocp
k-ncl
p
|
[0066]
假设回转体c中高度l
p
处的正截面半径为r
p
,若d
p
>r
p
,则判定可能干涉点pk不在回转体c内部,可能干涉点pk与回转体c不干涉,若d
p
≤r
p
,则判定可能干涉点pk在回转体c内部,可能干涉点pk与回转体c存在干涉。
[0067]
对所有的可能干涉点pk,k=0,1,2,..,n与所有回转体进行上述位置判断,若所有可能干涉点均不在回转体内部,则判定工件与粗糙度传感器不干涉,否则判定工件与粗糙度传感器存在干涉。
[0068]
另外,如图5所示,本发明还提供一种五轴测量粗糙度中传感器的干涉检测系统,优选采用如上所述的干涉检测方法,其包括:
[0069]
模型构建模块,用于建立由多个回转体构成的粗糙度传感器模型;
[0070]
模型细分模块,用于将每个回转体细分为多个小回转体,并基于每个小回转体构造一个球形邻域;
[0071]
筛选模块,用于获取若干个工件采样点,构造工件采样点的k-d树并利用k-d树筛选出位于球形邻域内的工件采样点,将其作为可能干涉点;
[0072]
分析判断模块,用于基于可能干涉点和每个回转体进行位置判断,根据位置判断结果判定工件与粗糙度传感器是否干涉。
[0073]
可以理解,本实施例的五轴测量粗糙度中传感器的干涉检测系统,首先根据粗糙度传感器的外形特征用多个回转体进行建模,能够很好地反映粗糙度传感器的实际外形,然后将每个回转体细分为多个小回转体并构造球形邻域,以将粗糙度传感器模型划分为若干个球形邻域,再通过采集足够多的工件采样点来表示工件,通过构造工件采样点的k-d树快速筛选出可能干涉点,显著减少了干涉检测的运算量和计算时间,提高了检测效率,最后提出了一种点和回转体的干涉判断算法,可以准确地判断出粗糙度传感器与工件是否发生干涉,显著提高了五轴测量粗糙度中粗糙度传感器的干涉检测速度、精度,提升了传感器的抗干涉性,并且具有普遍适用性,可以适用于复杂叶轮、机匣、长轴等复杂航空发动机零件测量表面曲率变化大、测量部位深等抗干涉要求高的表面粗糙度检测,并可以在汽车等其他领域机械零件的检测应用,具有很强的推广价值。
[0074]
可以理解,本实施例的各个模块分别与上述方法实施例的各个步骤相对应,故各个模块的工作过程和工作原理在此不再赘述,参考上述方法实施例即可。
[0075]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。