1.本发明属于光学测量技术领域,更具体地,涉及一种双工作台光学散射测量系统。
背景技术:
2.随着集成电路领域的不断发展,器件具有更高储存容量、更小晶体管尺寸、更复杂形状特点,推动着复杂3d器件结构的测量测量工具的持续发展。光学散射测量凭借其非接触性、非破坏性、快速、成本低等特点,已被大规模应用于半导体行业集成电路生产工艺线上的光学关键尺寸(ocd,optical critical dimension)测量中。
3.光学散射测量是一种非成像光学技术,使用以波长或者角度作为变量的函数作为输入,测量纳米结构的反射光谱信息,再通过逆求解得到纳米结构的几何参数等信息。
4.目前的散射测量装置都是基于单工作台,对准和测量是两个单独的工序,无法同时实现快速对准和测量,这就增加了测量时间和测量误差。
技术实现要素:
5.本发明通过提供一种双工作台光学散射测量系统,解决现有技术中散射测量装置无法同时实现光线对准和测量的问题。
6.本发明提供一种双工作台光学散射测量系统,包括:从内向外依次同心设置的样品转台、内转台和外转台;所述样品转台用于放置待测样品;所述内转台上安装有光源组件和对准装置,所述光源组件包括光源支架和激光源,所述激光源安装在所述光源支架上;所述对准装置设置在所述激光源的光路上,所述对准装置用于对所述待测样品的入射光线进行对准调整;所述外转台上安装有检测组件,所述检测组件包括检测装置支架和探测器,所述探测器安装在所述检测装置支架上;所述检测组件用于对所述待测样品进行测量;所述样品转台、所述内转台和所述外转台分别按照预设的旋转角度进行转动,以调整所述待测样品的入射光线的入射角和测量角,并调节入射光线的对准角度。
7.优选的,所述光源支架的高度可调。
8.优选的,所述检测装置支架上布设有至少一条水平槽道和至少一条垂直槽道,所述探测器在所述检测装置支架上的位置可调。
9.优选的,所述外转台和所述内转台均采用二级减速传动装置;所述二级减速传动装置包括一级减速装置和二级减速装置,所述一级减速装置采用同步带轮传动,所述二级减速装置采用蜗轮蜗杆传动;所述内转台采用第一步进电机作为转台动力源,所述第一步进电机与第一电机驱动器连接;所述外转台采用第二步进电机作为转台动力源,所述第二步进电机与第二电机驱动器连接。
10.优选的,所述外转台和所述内转台均由专供回转工作台高精密级别的轴承进行支撑;所述专供回转工作台高精密级别的轴承采用交叉圆柱滚子轴承、zkldf四点球接触轴承或yrt转台轴承。
11.优选的,所述双工作台光学散射测量系统还包括:台体;所述样品转台、所述内转
台和所述外转台均安装在所述台体上。
12.优选的,所述双工作台光学散射测量系统还包括:第一角位置传感器和第二角位置传感器;所述第一角位置传感器安装在所述内转台与所述台体之间,所述第一角位置传感器用于获取所述内转台旋转时的角位置信息,并将获取的角位置信息反馈至所述第一步进电机,形成闭环负反馈;所述第二角位置传感器安装在所述外转台与所述台体之间,所述第二角位置传感器用于获取所述外转台旋转时的角位置信息,并将获取的角位置信息反馈至所述第二步进电机,形成闭环负反馈。
13.优选的,所述第一角位置传感器可采用旋转变压器、感应同步器或光栅编码器,所述第二角位置传感器可采用旋转变压器、感应同步器或光栅编码器。
14.优选的,所述双工作台光学散射测量系统还包括:控制系统,所述控制系统包括微机处理器、外部输入设备、误差分析装置和隔离保护装置;所述外部输入设备与所述微机处理器连接,所述微机处理器的输出端分别与转台动力源、角位置传感器的动力源连接,所述角位置传感器的输出端、所述误差分析装置、所述隔离保护装置依次连接;所述误差分析装置用于根据所述内转台旋转时的角位置信息和所述外转台旋转时的角位置信息得到反馈误差信号;所述隔离保护装置用于对所述反馈误差信号进行隔离保护;所述微机处理器用于接收来自所述外部输入设备的外部输入信息,用于接收隔离保护后的反馈误差信号,用于根据所述外部输入信息和所述反馈误差信号调整控制参数并输出;所述控制参数包括各转台的转动方向、转动角度,以及所述内转台与所述外转台之间相对位置的定位精度。
15.优选的,所述双工作台光学散射测量系统可进行θ-nθ的联动测量,n为非零的任意数值,当n为负数时,负号表示所述外转台与所述内转台的旋转方向相反;进行θ-nθ的联动测量时,入射光线随着所述光源组件和所述对准装置的旋转绕转台的轴中心o轴作θ转动,所述探测器绕转台的轴中心o轴作nθ转动,所述内转台和所述外转台的转动角速度的比值为1:n。
16.本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
17.本发明提供的一种双工作台光学散射测量系统包括从内向外依次同心设置的样品转台、内转台和外转台,样品转台用于放置待测样品,在内转台上安装光源组件(激光源安装在光源支架上)和对准装置,将对准装置设置在激光源的光路上,利用对准装置对激光源发出的光线进行校正获得准直光束,结合内转台的转动入射到待测样品的测量部位;在外转台上安装检测组件(探测器安装在检测装置支架上),通过检测组件对待测样品进行测量;样品转台、内转台和外转台分别按照预设的旋转角度进行转动,可以调整待测样品的入射光线的入射角和测量角,并在测量过程中可以调节入射光线的对准角度。本发明基于内外双转台,可以同时实现光线的对准和测量,提高了测量的效率和精度。
附图说明
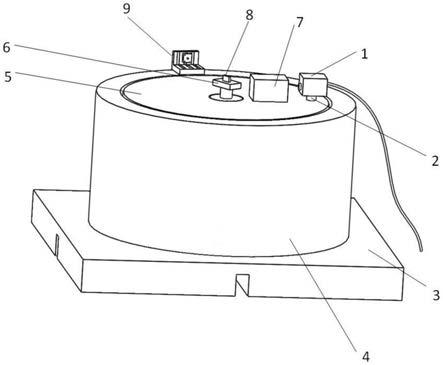
18.图1为本发明实施例提供的一种双工作台光学散射测量系统的结构示意图;
19.图2为本发明实施例提供的一种双工作台光学散射测量系统中内转台和外转台的传动示意图;
20.图3中的(a)为内转台进行闭环负反馈控制的原理图,图3中的(b)为外转台进行闭环负反馈控制的原理图;
21.图4为本发明实施例提供的一种双工作台光学散射测量系统的控制原理图;
22.图5为利用本发明实施例提供的一种双工作台光学散射测量系统进行θ-2θ测量的示意图。
23.其中,1-激光源、2-光源支架、3-台体、4-外转台、5-内转台、6-样品转台、7-对准装置、8-待测样品、9-检测装置支架;
24.201-第一步进电机、202-第一同步带轮、203-第二同步带轮、204-外转台、205-内转台、206-第一蜗轮蜗杆副、207-第二蜗轮蜗杆副、208-第一角位置传感器、209-第三蜗轮蜗杆副、210-第四蜗轮蜗杆副、211-第二角位置传感器、212-第三同步带轮、213-第四同步带轮、214-第二步进电机。
具体实施方式
25.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
26.本实施例提供了一种双工作台光学散射测量系统,参见图1、图5,包括:从内向外依次同心设置的样品转台6、内转台5和外转台4。
27.所述样品转台6用于放置待测样品8。所述内转台5上安装有光源组件和对准装置7,所述光源组件包括光源支架2和激光源1,所述激光源1安装在所述光源支架2上;所述对准装置7设置在所述激光源1的光路上,所述对准装置7用于对所述待测样品8的入射光线进行对准调整。所述外转台4上安装有检测组件,所述检测组件包括检测装置支架9和探测器,所述探测器安装在所述检测装置支架9上;所述检测组件用于对所述待测样品8进行测量。所述样品转台6、所述内转台5和所述外转台4分别按照预设的旋转角度进行转动,以调整所述待测样品8的入射光线的入射角和测量角,并调节入射光线的对准角度,达到即时对准和多角度测量的效果。
28.其中,所述待测样品8可以是薄膜、晶圆、光栅等成形样品。
29.所述光源支架2的高度可调,因此所述激光源1是可以通过所述光源支架2进行高度位置调节的,有助于对入射光线的对准角度进行调节。具体的,所述光源支架2可采用套筒套接加螺纹紧固的方式来对高度进行调整。
30.所述检测装置支架9上布设有至少一条水平槽道和至少一条垂直槽道,所述探测器在所述检测装置支架9上的位置可调,具体的,可调节所述探测器相对于所述待测样品8的水平距离和高度。
31.所述检测装置支架9放置在所述外转台4上,所述探测器和所述检测装置支架9随着所述外转台4的旋转,实现对所述待测样品8进行多角度测量。所述探测器可以在所述检测装置支架9上可以进行前后上下的位置调整,且可以移动所述待测样品8或可以通过所述样品转台6对所述待测样品8的位置进行调整,实现对所述待测样品8进行多位置测量。
32.所述对准装置7放置在所述内转台5上,所述对准装置7随着所述内转台5的旋转对所述待测样品8表面的入射光进行实时对准调整。所述对准装置7的壳体内具体可设置由一系列透镜构成的透镜组,所述对准装置7固定在所述激光源1的正前方,能够将所述激光源1发出的光线进行校正,获得准直光束,所述准直光束对准所述待测样品8的测量部位,实现位置对准。
33.此外,所述双工作台光学散射测量系统还可以包括台体3,所述样品转台6、所述内转台5和所述外转台4均安装在所述台体3上。
34.参见图2、图3,本发明中的所述外转台204和所述内转台205可实现在同一中心轴系的独立回转且互不影响。具体的,所述外转台204和所述内转台205均采用二级减速传动装置;所述二级减速传动装置包括一级减速装置和二级减速装置,所述一级减速装置采用同步带轮(包括第一同步带轮202、第二同步带轮203、第三同步带轮212、第四同步带轮213)传动,所述二级减速装置采用蜗轮蜗杆(包括第一蜗轮蜗杆副206、第二蜗轮蜗杆副207、第三蜗轮蜗杆副209、第四蜗轮蜗杆副210)传动。蜗轮蜗杆传动具有传动比大、平稳性好、结构紧凑和冲击振动噪音小等优点。所述内转台205采用第一步进电机201作为转台动力源,所述第一步进电机201与第一电机驱动器连接;所述外转台204采用第二步进电机214作为转台动力源,所述第二步进电机214与第二电机驱动器连接。即采用两个速度可调节的步进电机作为转台动力源,对内、外转台进行驱动。为提高步进电机的精度,可采用配套电机驱动器对步进电机进行驱动。
35.所述外转台204和所述内转台205均由专供回转工作台高精密级别的轴承进行支撑;所述专供回转工作台高精密级别的轴承可采用交叉圆柱滚子轴承、zkldf四点球接触轴承、yrt转台轴承等。
36.优选的方案中,为将所述外转台204和所述内转台205旋转时振动影响降到最低,所述双工作台光学散射测量系统还包括第一角位置传感器208、第二角位置传感器211。图3中的(a)为内转台进行闭环负反馈控制的原理图,所述第一角位置传感器208安装在所述内转台205与所述台体3之间,所述第一角位置传感器208用于获取所述内转台205旋转时的角位置信息,并将获取的角位置信息反馈至所述第一步进电机201,形成闭环负反馈。图3中的(b)为外转台进行闭环负反馈控制的原理图,所述第二角位置传感器211安装在所述外转台204与所述台体3之间,所述第二角位置传感器211用于获取所述外转台204旋转时的角位置信息,并将获取的角位置信息反馈至所述第二步进电机214,形成闭环负反馈。
37.其中,所述第一角位置传感器可采用旋转变压器、感应同步器、光栅编码器等,所述第二角位置传感器可采用旋转变压器、感应同步器、光栅编码器等。
38.角位置传感器可以感应内、外转台旋转时的角度变化(旋转变压器)、位置变化(感应同步器、光栅编码器)等信息,并把这些信息转化为电信号,接着把电信号反应给内、外转台对应的电机驱动器,对其电压进行调整,减少位置偏差,从来降低振动带来的不良影响,进一步提高双工作平台的定位精度。
39.参见图4,优选的方案中,所述双工作台光学散射测量系统还包括:控制系统,所述控制系统包括微机处理器、外部输入设备、误差分析装置和隔离保护装置。所述外部输入设备与所述微机处理器连接,所述微机处理器的输出端分别与转台动力源、角位置传感器的动力源连接,所述角位置传感器的输出端、所述误差分析装置、所述隔离保护装置依次连接;所述误差分析装置用于根据所述内转台旋转时的角位置信息和所述外转台旋转时的角位置信息得到反馈误差信号;所述隔离保护装置用于对所述反馈误差信号进行隔离保护;所述微机处理器用于接收来自所述外部输入设备的外部输入信息,用于接收隔离保护后的反馈误差信号,用于根据所述外部输入信息和所述反馈误差信号调整控制参数并输出;所述控制参数包括各转台的转动方向、转动角度,以及所述内转台与所述外转台之间相对位
置的定位精度。
40.此外,也可能出现以下情况:测量初始时光线是对准的,但是在测量过程中可能会产生各种误差。通过本发明提供的控制系统,能够将测量过程中产生的误差通过负反馈消除,实现高精度光线对准。
41.所述双工作台光学散射测量系统可进行θ-nθ的联动测量,n为非零的任意数值,当n为负数时,负号表示所述外转台与所述内转台的旋转方向相反;进行θ-nθ的联动测量时,入射光线随着所述光源组件和所述对准装置的旋转绕转台的轴中心o轴作θ转动,所述探测器绕转台的轴中心o轴作nθ转动,所述内转台和所述外转台的转动角速度的比值为1:n。
42.以θ-2θ测量为例,参见图5,入射光线随着所述光源组件和所述对准装置的旋转绕转台的轴中心o轴作θ转动,同时放置在外转台上的所述探测器绕中心o轴作2θ转动,实现θ-2θ联动测量。在转动的过程中,所述内转台和所述外转台的转动角速度的比值为1:2。实现其它角度的联动测量只需调整内、外转台的角速度的比值即可。
43.本发明实施例提供的一种双工作台光学散射测量系统至少包括如下技术效果:
44.(1)本发明基于内外双转台,可以同时实现光线的对准和测量,提高了光学散射测量的效率和精度。
45.(2)光源支架的高度可调,激光源可以通过光源支架进行高度位置调节的,有助于对入射光线的对准角度进行调节。探测器可以在检测装置支架上可以进行前后上下的位置调整,且可以移动待测样品或可以通过样品转台对待测样品8的位置进行调整,实现对待测样品的多位置测量。探测器和检测装置支架随着外转台的旋转,能够实现对待测样品的多角度测量。
46.(3)外转台和内转台均采用二级减速传动装置,外转台和内转台可实现在同一中心轴系的独立回转且互不影响。
47.(4)通过设置角位置传感器可以减少位置偏差,降低振动带来的不良影响,进一步提高双工作平台的定位精度。
48.(5)通过控制系统能够将测量过程中产生的误差通过负反馈消除,实现高精度光线对准和测量。
49.(6)只需调整内、外转台的角速度的比值即可实现各种角度的联动测量,操作方便、简单。
50.最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。