1.本发明涉及一种手持式工具机,其具有工具接收部和壳体,在所述壳体中布置有至少一个电子换向的、用于驱动可布置在工具接收部中的插入式工具的驱动马达;以及布置在壳体中的传感器电路板,在该传感器电路板上布置有传感器元件,以便能够实现电子换向的驱动马达的传感器控制的换向。
背景技术:
2.由现有技术已知这种构造为起子机的手持式工具机,其在壳体中具有电子换向的、用于驱动可布置在工具接收部中的插入式工具的驱动马达。电子换向的驱动马达以传感器控制的方式换向,其中,为此设置具有传感器元件、优选地霍尔传感器的传感器电路板。传感器电路板机械地布置或固定在电子换向的驱动马达上。
技术实现要素:
3.本发明涉及一种手持式工具机,其具有工具接收部和壳体,在该壳体中布置有至少一个电子换向的、用于驱动可布置在工具接收部中的插入式工具的驱动马达;以及布置在壳体中的传感器电路板,在该传感器电路板上布置有传感器元件,以便能够实现电子换向的驱动马达的传感器控制的换向。至少一个支承元件设置为用于将传感器电路板支承在壳体中并且用于将传感器电路板布置在电子换向的驱动马达上,其中,传感器电路板与电子换向的驱动马达机械地脱耦。
4.因此,本发明能够提供一种手持式工具机,在该手持式工具机中,通过至少一个支承元件能够实现传感器电路板在手持式工具机壳体中的简化和稳定的布置。此外,通过至少一个支承元件能够实现驱动马达和传感器电路板的紧凑布置。
5.在至少一个支承元件的一个构型中,所述至少一个支承元件具有用于至少区段地接收传感器电路板的接收部。
6.优选地,所述至少一个支承元件布置在壳体上。因此能够以简单的方式实现与驱动马达的机械脱耦。
7.替代地或附加地,所述至少一个支承元件布置在传感器电路板上。为了将支承元件支承在手持式工具机的壳体中,在该壳体中设置接收部,该接收部接收支承元件。
8.在一个实施方式中,所述至少一个支承元件通过喷射铸造固定在传感器电路板上。因此能够实现至少一个支承元件的安全和鲁棒的布置。
9.根据一个实施方式,通风装置布置在壳体中,其中,通风装置定位在电子换向的驱动马达的面向工具接收部的端部上。因此能够容易且不复杂地实现手持式工具机,例如传动装置和/或冲击机构的冷却。
10.根据一个替代的实施方式,通风装置布置在壳体中,其中,通风装置定位在电子换向的驱动马达的背离工具接收部的端部上。因此可以容易且不复杂地实现手持式工具机,例如驱动马达的冷却。
11.优选地,传感器电路板布置在通风装置和电子换向的驱动马达之间。因此能够以简单的方式实现适合的布线和/或冷却。传感器电路板和通风装置在此可以定位在电子换向的驱动马达的背离工具接收部的端部上。用于支承驱动轴的锚定轴承(ankerlager)在此可以这样地定位,使得传感器电路板在锚定轴承和通风装置之间布置在电子换向的驱动马达的背离工具接收部的端部上。替代地,传感器电路板和通风装置在此可以定位在电子换向的驱动马达的面向工具接收部的端部上。
12.传感器电路板优选地具有u形的基体。u形的基体在本发明的范畴内也被理解为基体的与u形偏离的敞开形状,例如c形的、弓形的或半圆形的基体。因此能够实现传感器电路板的容易且不复杂的装配,其中,传感器电路板的装配可以在驱动马达的装配之后进行。
13.替代地,传感器电路板具有圆形的基体。圆形的基体在本发明的范畴内也被理解为基体的与圆形偏离的闭合形状,例如卵形或椭圆形的基体。圆形的基体例如为传感器和其他电子组件在传感器电路板上的安放提供更多面积。
14.根据另一实施方式,传感器电路板定位在电子换向的驱动马达的背离工具接收部的端部上。在此,通风装置可以定位在电子换向的驱动马达的面向工具接收部的端部上。用于支承驱动轴的锚定轴承可以如此定位,使得传感器电路板布置在锚定轴承与电子换向的驱动马达的背离工具接收部的端部之间。因此可以容易且不复杂地实现传感器电路板的另一适合的布置。
15.优选地,传感器元件具有霍尔传感器。因此可以提供可靠和成本有利的传感器元件。
16.传感器电路板优选地与电子单元电连接,该电子单元配属于电子换向的驱动马达。因此可以提供能够简单地装配的传感器电路板,因为可以省去用于与电子单元连接的插接连接。
17.设置用于给电子换向的驱动马达供能的供能单元,该供能单元优选地构造为蓄电池组。因此可以以简单的方式提供适合的供能。
18.根据一个实施方式,手持式工具机构造为旋转冲击起子机。因此可以容易且不复杂地提供使用传感器电路板的适合的手持式工具机。
附图说明
19.根据在附图中所示的实施例在下面的描述中进一步阐述本发明。附图示出了:
20.图1根据本发明的手持式工具机的侧视图;
21.图2图1的手持式工具机的部分纵截面,用于阐明配属于手持式工具机的传感器电路板的布置方式;
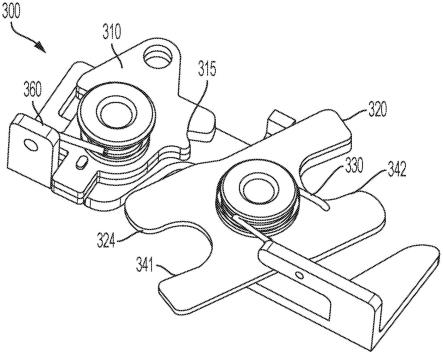
22.图3从手持式工具机的第二轴向端部看去布置在手持式工具机壳体中的传感器电路板的俯视图;和
23.图4图1的手持式工具机的部分截面,用于阐明配配属于手持式工具机的传感器电路板的另一布置方式。
具体实施方式
24.图1示出示例性的手持式工具机100,其具有壳体105,该壳体具有把手115。根据一
个实施方式,手持式工具机100为了不依赖电网的供电能够与供能单元190机械和电连接。
25.在壳体105中优选地布置有驱动单元127,该驱动单元具有第一轴向端部101和对置的第二轴向端部102。驱动单元127具有至少一个传动单元125以及电驱动马达180。
26.优选地,供能单元190设置为用于给手持式工具机100的驱动马达180供能。优选地,供能单元190构造为蓄电池组。对此替代地或附加地,手持式工具机100也可以依赖电网地运行。
27.驱动马达180优选地构造为电子换向的驱动马达185。为此,驱动马达180为了传感器控制地换向而配有具有传感器元件(在图2中的252)的传感器电路板160。传感器电路板160优选地与电子换向的驱动马达185机械脱耦。驱动马达180或者说驱动马达180的驱动轴215(图2)通过锚定轴承217支承在壳体105中。
28.驱动马达180例如能够通过手动开关195接通和关断。此外,手持式工具机100在第二轴向端部102上配有工具接收部140,用于接收插入式工具,例如起子机批头、钻头等。驱动马达180优选地构造为用于驱动工具接收部140和因此驱动插入式工具。
29.优选地,传动单元125面向第二轴向端部102地布置,并且驱动马达180面向第一轴向端部101地设置。优选地,传动单元125配有至少一个传动装置120。
30.例如手持式工具机100构造为具有冲击机构150的旋转冲击起子机。冲击机构150配属于传动单元125。在此指出:本发明不限于旋转冲击起子机,而是也可用于具有冲击机构150或不具有冲击机构150的不同的手持式工具机中,所述手持式工具机具有传感器控制的驱动马达,例如在蓄电池-钻孔起子机的情况下。
31.此外,优选地设置通风装置130。图示地且示例性地,通风装置130定位在电子换向的驱动马达185的第一轴向端部101上或者说在背离工具接收部140的端部201上。然而,通风装置130也可以布置在壳体105中的任意另一位置处。通风装置130例如可以布置在电子换向的驱动马达185的面向工具接收部140或第二轴向端部102的端部202上,例如如在图2和4中所示的那样。优选地,传感器电路板160布置在通风装置130和驱动马达180之间,如在图1和4中所示的那样。然而,手持式工具机100也可以构造为不具有通风装置130。
32.此外,手持式工具机100具有电子单元187。优选地,电子单元187配属于驱动马达180。根据一个实施方式,电子单元187构造为主电子器件,驱动马达180和传感器电路板160的信号被发送给该主电子器件。优选地,传感器电路板160与电子单元187电连接,其中,电连接可以通过焊接的线路和/或插接连接构造。
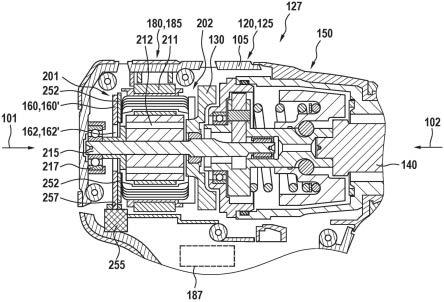
33.图2示出图1的驱动单元127,其具有驱动马达180、传动单元125和传感器电路板160。在此,图2阐明构造为电子换向的驱动马达185的驱动马达180,其通过驱动轴215支承在壳体105中并且具有定子211以及转子212。驱动轴215在壳体105中的支承在所示的实施方式中在第一轴向端部101的区域中借助锚定轴承217实现。锚定轴承217定位在电子换向的驱动马达185的背离工具接收部140的端部201上。
34.替代地或附加地,驱动轴215也可以支承在配属于传动单元125的传动装置法兰中。这种电子换向的驱动马达185由现有技术充分已知,因此在此省去进一步的描述。
35.在图2中,通风装置130示例性地布置在驱动马达180和传动单元125的面向第二轴向端部102的一侧或者说从动侧上。通风装置130定位在电子换向的驱动马达185的面向工具接收部140的端部202上。然而,通风装置130也可以布置在驱动马达180的面向驱动单元
127的第一轴向端部101的一侧上,如在图1中示意地所示的那样。在此,通风装置130优选地布置或者说支承在驱动轴215上。
36.在图2中,传感器电路板160定位在电子换向的驱动马达185的背离工具接收部140的端部201上。传感器电路板160在锚定轴承217与电子换向的驱动马达185之间定位在电子换向的驱动马达185的背离工具接收部140的端部201上。优选地,设置至少一个支承元件255,用于将传感器电路板160支承在壳体105中并且用于将传感器电路板160布置在电子换向的驱动马达185上。至少一个支承元件255优选地构造为在壳体105与传感器电路板160之间的中间元件。
37.图示地,至少一个支承元件255布置在形成壳体105的壳体外壳或者说壳体半壳上。然而在此指出,壳体105也可以具有盖件,优选地在第一轴向端部101上或者在图2中图示的左端部上。该盖件优选地能够例如通过夹紧和/或螺纹连接固定在壳体半壳上。在这种情况下,驱动轴215可以与转子212、同样与盖件连接或者支承在其上。根据另一实施方式,传感器电路板160可以通过至少一个支承元件255布置在盖件上并且因此支承在壳体105中。
38.传感器电路板160与电子换向的驱动马达185机械脱耦,即传感器电路板160未如在现有技术中那样轴向地固定在驱动马达185的定子211上,而是与该定子无关地机械地固定在壳体105中。在此,传感器电路板160与驱动马达185、尤其定子211机械脱耦,但定位在定子211上。
39.在此指出,通过传感器电路板160与驱动马达180的机械脱耦,也可以在没有传感器电路板160的情况下运行驱动马达180,即驱动马达可以作为无传感器换向的驱动马达运行。此外,可以通过与驱动马达电子脱耦的传感器电路板160改装无传感器换向的驱动马达并且可以将其构造为传感器控制的换向的驱动马达。此外,通过脱耦简化了传感器电路板160,例如在传感器元件252故障的情况下的更换。
40.根据一个实施方式,至少一个支承元件255固定在壳体105上。优选地,至少一个支承元件255具有用于至少区段地接收传感器电路板160的接收部257。优选地构造点式支承或面式支承。
41.优选地,传感器电路板160可以通过支承元件255以支承点定位在壳体105中,其中,优选地构造所谓的单点或单面支承。此外也可以设置两点或两面支承、如例如在图3中所示的那样,或设置具有超过两个点或面的支承,例如三点支承、三面支承、四点支承或四面支承等。此外,支承元件255也可以构造为c形,其中,将传感器电路板160通过预给定的区域支承在壳体105中,并且其中,例如在支承元件255和传感器电路板160之间形成槽-榫连接。
42.在此,支承元件255固定地紧固在壳体105的内部空间中,例如通过力锁合连接、形状锁合连接和/或材料锁合连接。此外,支承元件255也可以与壳体105一体地构造。
43.根据一个替代的布置方式,至少一个支承元件255通过喷射铸造固定或注塑在传感器电路板160上。这例如可以如在具有彼此配属的形状的插头和/或耦合件中那样地实现。在此,至少一个支承元件255具有用于例如布置在壳体105的壳体接片上的接收部。然而,至少一个支承元件255也可以通过可松开的连接,例如夹紧和/或螺纹连接固定在壳体105上。壳体105也可以具有接收部(未示出),传感器电路板160的支承元件255接收在该接
收部中。
44.优选地,传感器元件252具有霍尔传感器。此外,传感器元件252也可以具有另外的元件。此外,传感器元件252也可以构造为霍尔传感器。在此,传感器元件252与传感器电路板160机械和电连接,例如焊接和/或通过插接连接方式连接。
45.霍尔传感器构造为用于探测配属于转子212的转子位置。由此可以求取当前的转数。根据求出的转数然后又可以操控驱动马达180。
46.图3示出图2的传感器电路板160在图1的手持式工具机100的壳体105中的布置并且示例性地阐明两个优选地正好相反对置的支承元件255。在此指出:设置至少一个支承元件255。在此不限制支承元件255的数量,并且因此可以存在任意数量的支承元件255。
47.至少一个支承元件255布置在壳体105上。支承元件255可以与壳体105一体地构造。支承元件255也可以实施为单独的支承元件,其固定在壳体105上。支承元件255可以轨道状地构造。此外,支承元件255可以根据槽/榫元件构造,其中,支承元件255构成槽元件或榫元件,而壳体105和/或传感器电路板160构成榫元件或槽元件。在此,支承元件255可以优选地在其面向壳体105的一侧上具有槽元件或榫元件,并且在其面向传感器电路板160的一侧上具有槽元件或榫元件。然而,支承元件255也可以构造在壳体105上,例如与壳体一体地构造或通过紧固元件固定在该壳体上并且在其面向传感器元件160的一侧上具有槽元件或榫元件。
48.根据一个替代或可选择的实施方式,支承元件255可以u形地构造。此外,支承元件255可以根据插头类型或插座类型构造。替代地或可选择地,支承元件255可以根据耦合件构造,其中,支承元件255具有耦合几何结构,并且壳体105和/或传感器电路板160具有配属于该耦合几何结构的耦合几何结构。
49.在图3中以实线示出u形构型的传感器电路板160。附加地,在图3中以虚线示出圆形传感器电路板160
‘
的替代构型。传感器电路板160具有槽口162,驱动轴215布置在该槽口中。槽口162在所示的实施方式中是近似半圆形的。驱动轴215至少区段地布置在槽口162中。u形的传感器电路板160区段地围绕驱动轴215。圆形传感器电路板160
‘
的替代构型同样具有槽口162
‘
,驱动轴215布置在其中。槽口162
‘
在所示的实施方式中基本上是圆形的。驱动轴215布置在槽口162
‘
中。驱动轴215穿过传感器电路板160
‘
的槽口162
‘
伸出。传感器电路板160
‘
围绕驱动轴215。替代地,槽口162、162
‘
也可以呈适用于接收驱动轴215的其它几何形状。
50.图4示出图1和图2的驱动单元127,其具有驱动马达180、传动单元125和传感器电路板160,其中,传感器电路板160根据一个替代的布置方式布置在驱动马达180与通风装置130之间。通风装置130和传感器电路板160在此定位在电子换向的驱动马达185的面向工具接收部140的端部202上。此外,图4直观示出传感器电路板160,其优选地具有u形的基体450。
51.然而,传感器电路板160也可以具有任意其它形状的基体,例如c形或i形的基体。此外,传感器电路板160也可以两件式或多件式地构造。在此,例如两个i形的基体可以构成传感器电路板160。通常,传感器电路板160如此构造,使得该传感器电路板在装配驱动单元127之后可以布置或者说定位在定子211的区域中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。