1.本发明涉及一种用于确定至少一个可运动构件相对于固定不动构件的位置的方法,其中在可运动构件上设置具有极距的多个位置磁铁(定位磁铁)的设置单元,并且在固定不动构件上设置具有多个位置传感器的设置单元,这些位置传感器具有传感器间距,其中利用位置传感器以传感器响应的形式检测在该位置传感器的区域内的位置磁铁的磁场。本发明还涉及一种具有可运动构件和固定不动构件的运动系统,其中确定可运动构件相对于固定不动构件的位置。
背景技术:
2.直线电机或者平面电机的特征在于一个可运动部件(动子)由于交互作用的磁场之故相对一个固定部件(定子)运动。为此在两个部件之一上设置有一个驱动磁铁(电磁铁或者永久磁铁),该驱动磁铁为了产生一个推进力与磁场共同作用,该磁场由其它部件上被通电的驱动线圈产生。如果在驱动线圈上施加一个电压的话,产生一个磁场,该磁场与驱动磁铁的磁场共同作用,因此在可运动部件上产生一个使该可运动部件运动的力。为了使动子运动,通过对驱动线圈的相应操控产生一个运动磁场。这个基本电动原理是广为人知的,所以在此无须赘述。在此,驱动线圈是设置在运动部件(动子)上还是固定部件(定子)上,原则上也不重要。
3.为了调节直线电机的动子的运动,了解其相对定子的当前位置有利于能够正确操控驱动线圈产生运动磁场。因此定子的位置确定对于直线电机运行来说具有特别重要的作用。在这种情况下,在接通直线电机时确定动子的当前位置是特别困难的,这是因为事先无法知道动子在接通的时间点位于何处。为了在接通直线电机时进行定位或者说位置确定,已经提出了各种不同的方法。
4.例如,us 7,932,684 b2说明了一种直线电机,该直线电机为了定位额外包括设置在动子上的位置磁铁和固定不动的位置传感器(例如设置在定子上)。如果使动子运动的话,位置磁铁就相对于位置传感器运动,并且可以确定动子相对定子的当前位置。位置磁铁包括第一列若干并排设置的、与一个增量式传感器共同作用的永久磁铁和第二列若干并排设置的、与一个绝对传感器共同作用的永久磁铁。绝对传感器、例如霍尔传感器设计为这个绝对传感器只提供两种状态,其中状态在动子的一个确定的位置处转换。增量式传感器、例如磁阻传感器设计为这个增量式传感器提供许多重复的传感器循环,其中在一个传感器循环内可以非常准确地确定位置。在接通时,首先必须进行“回原点”,即以一个事先给定的已知零位为基准。为此使动子运动,直到绝对传感器测到一个状态转换为止,因此确定了零位。然后以该零位为起点,通过对传感器循环的数量进行计数和在传感器循环内精确地确定位置,可以步进式地测定动子的当前位置。所以在us 7,932,684 b2中,为了确定接通时动子的位置需要进行参考运行,也就是使动子运动。然而,这种类型的位置检测只有在比较有限的动子运动区域中才能合理地实现。对于许多应用,特别是对于具有大运动空间的直线电机或者对于具有许多动子的长定子直线电机来说,这种类型的定位当然是绝对不适合
的。
5.从us 7,994,742 b2中可以获得绝对位置的确定方法,即使在接通直线电机时。在此,在可能的运动空间上一个长形的位置磁铁设置在动子上,其中该位置磁铁设置成,使得沿着横向产生一个与位置相关的偏移。在一个固定不动的结构上,例如在定子上,设置有一个检测位置磁铁磁场的位置传感器。由于偏移之故,在动子的每个位置上都产生一个单义的磁场,该磁场由位置传感器检测。因此,即使在接通直线电机时也能够立刻推断出动子的当前位置,并且无需使动子运动。然而,运动空间在此当然限制在位置磁铁的长度上,因此是非常有限的。对于许多应用,特别是对于具有大运动空间的直线电机或者对于具有许多动子的长定子直线电机来说,这种类型的定位当然是绝对不适合的。
6.us 6,876,107 b2说明了一种已知的长定子直线电机作为直线电机。一个这样的长定子直线电机包括许多驱动线圈,这些驱动线圈固定不动地并排设置并构成长定子直线电机的定子。沿着定子可以设置许多能够沿着该定子运动的动子。每个动子承载一个驱动磁铁。为了使动子运动,分别给刚好与一个动子共同作用的驱动线圈通电。通过这种方式能够使各个动子互相独立地沿着定子运动。这样的长定子直线电机通常使用在柔性传送系统中,例如生产过程中或者输送技术中。此外,us 6,876,107 b2还说明了一个真绝对位置(“true absolute position”)的确定,这使得在接通长定子直线电机时立刻确定一个动子的准确位置成为可能,而不必为此(例如通过动子的参考运行)实施基准定位。这当然是非常有利的,特别是在考虑到一个长定子直线电机中可能同时具有数百个动子也并不罕见时。为此,在一个动子上正好设置有一个额外的位置磁铁,并且沿着定子设置有许多位置传感器、例如磁阻传感器,该磁阻传感器检测位置磁铁的磁场。然而,位置传感器与此同时必须如下靠近地设置,即确保在每个时间点至少一个位置传感器能够检测到位置磁铁的磁场。在接通长定子直线电机时,因此为每个动子起动至少一个位置传感器,从而即使在未对动子进行基准定位的情况下也能够进行定位。其中的缺点是,需要一个额外的位置磁铁,并且位置传感器必须设置得非常紧密,这需要大量这样的位置传感器。
7.ep 3 376 166 a1再次说明了在接通电机时对长定子直线电机动子的位置检测。在这种情况下,将动子上的驱动磁铁用于位置检测,不需要额外的用于位置检测的位置磁铁。位置传感器在此也可以保持更大间距相互远离设置,因此可以减少所需位置传感器的数量。为了位置检测,首先通过如下方式确定动子的粗略位置,即确定动子上驱动磁铁设置单元的边缘位置。为驱动磁铁之一确定一个位置传感器,该位置传感器检测这个驱动磁铁的磁场。然后可以利用这个位置传感器确定动子相对该位置传感器的相对位置。由于位置传感器的安装位置是已知的,所以可以利用该已知的安装位置和求出的相对位置求出动子的绝对位置。尽管这个方法非常可靠,但是它也有弱点。特别是如果两个动子相互非常接近甚至相互紧靠的话,这个方法就可能失灵,这是因为不能或者很难可靠地确定边缘区域,或者因为无法识别多个彼此紧密相邻的动子。
8.类似的问题也出现在位置测量系统中,在这些位置测量系统中位置磁铁设置在一个运动部件上,由一个固定部件上的位置传感器检测这些位置磁铁的磁场。在这里也存在所述运动部件,或者在可能的情况下多个运动部件,如何相对固定部件定位的基本问题。
技术实现要素:
9.因此本发明的目的是提供一种确定具有多个位置磁铁的可运动构件相对具有多个位置传感器的固定构件的位置的方法。该方法在此特别是还能够识别多个靠近或者完全相互贴合的可运动构件并且对于这样靠近或者完全相互贴合的可运动构件同样可以实现可靠的位置确定。
10.这个目的利用独立权利要求的特征得以实现。通过使用一个传感器模型可以找到可运动构件的未知位置,其方式为在改变可运动构件的假设位置的情况下将传感器模型响应与实际测得的传感器响应进行比较。这个方法一方面非常稳健,在该方法中使可靠定位成为可能,即使在由于位置传感器安装位置不精确出现偏差的情况下或者在位置磁铁中出现偏差的情况下依然如此。当位置磁铁设置单元运动经过一个位置传感器时,传感器模型描述该位置传感器的传感器响应曲线。因此只须对传感器模型进行一次测定,然后就能够用于每个位置传感器。另一方面,通过使用传感器模型能够识别和鉴别即使靠近或者完全相互贴合的可运动构件。本方法不仅能够识别可运动构件位于何处,而且(如果存在多个不同的可运动构件的话)还能够识别哪个可运动构件位于何处。
附图说明
11.下面将参照附图1至9详细阐述本发明,附图示例性、示意性和非限定地示出了本发明的有利构造设计。附图中:
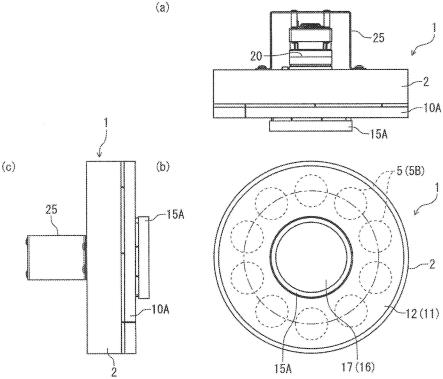
12.图1示出一个运动系统,其具有一个固定不动构件和一个可相对于固定不动构件运动的构件;
13.图2示出可运动构件上的位置磁铁设置单元的典型磁场;
14.图3示出一个位置传感器的典型传感器信号;
15.图4示出从传感器信号中获得的位置传感器的典型传感器响应;
16.图5示出传感器响应与可运动构件相对于位置传感器的相对位置相关的典型曲线,作为一个传感器模型的示例;
17.图6示出一个传感器模型的备选的存储方式;
18.图7示出定位时可能的情况;
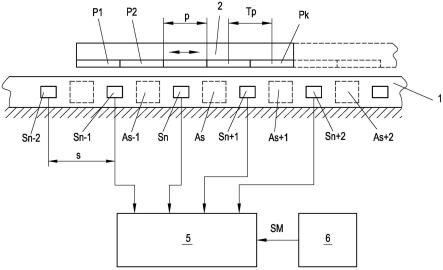
19.图8示出成本函数值与假设的相对位置相关的可能的曲线;并且
20.图9示出在一个长定子直线电机(作为运动系统的实施例)中一个分路器的区域中的定位。
具体实施方式
21.如在图1中示出的那样,本发明以一个运动系统为出发点,在该运动系统中在一个固定不动构件1上并排设置有多个位置传感器sn(n>1)并且在一个可运动构件2上并排设置有若干位置磁铁pk(k>1)、即永久磁铁或者电磁铁。可运动构件2相对于固定不动构件1运动。可运动部件2设置成,使得位置传感器sn能够检测到位置磁铁pk的磁场。通常这意味着,位置磁铁pk面朝固定不动构件1设置在可运动构件2上,而位置传感器sn-分别以其作用面-面朝可运动构件2设置。位置磁铁pk在此不是必须如在图1中示出的那样直接相互贴合设置。两个相邻的位置磁铁pk之间的间距称为极距tp。该极距tp可以、但不是必须与位置磁
铁宽度p相等。极距tp可以、但不是必须小于两个相邻的位置传感器sn之间的传感器间距s。位置磁铁pk可以极性交替地设置在可运动构件2上(另参见图2)。在平面电机的情况中,在一个平面中沿着两个方向产生一个这样的设置单元。
22.这样的运动系统出现在许多应用中。一个示例是直线电机、长定子直线电机或者平面电机,在这些电机中在固定不动构件1上额外地设置有多个驱动线圈as(s>1),如在图1中用虚线示出的那样。在一个平面电机的情况中,各驱动线圈as设置在一个平面中,而在一个直线电机或者长定子直线电机的情况中各驱动线圈沿着运动方向并排设置。在这个情况中,固定不动构件1构成电机的定子,可运动构件2能够沿着该定子运动。多个驱动磁铁设置在可运动构件2上,该可运动构件在这个应用中构成电机的动子。在此,驱动磁铁同时可以是位置磁铁pk(如例如在ep 3 376 166 a1中说明的那样),或者驱动磁铁与位置磁铁pk相互分开设置。如果给在可运动构件2的区域中的驱动线圈as通电的话(通过施加一个电压),例如在一个未示出的驱动控制器的控制下,产生一个驱动磁场,该驱动磁场与可运动构件2上的驱动磁铁的磁场共同作用,以在可运动构件2上产生一个推进力。驱动磁铁在此可以是永久磁铁或者电磁铁。在电磁铁的情况中,也可以在固定不动构件1上设置永久磁铁代替驱动线圈as。这个电机原理是众所周知的,因而在此不再赘述。
23.另一个应用是一个运动系统中的纯粹的位置检测,该运动系统包括一个可相对于固定不动构件1运动的构件2、例如在机床上的滑座。在这个应用中,通过另外的机械装置使可运动部件2运动,并且应该测定该可运动部件2相对于固定不动构件1的位置。
24.所使用的位置传感器sn测量磁场m,例如在相应的位置传感器sn的区域内的位置磁铁pk的磁场的量和/或方向。可能的位置传感器sn是磁致伸缩的传感器、磁阻传感器(如各向异性磁阻传感器、隧道磁阻传感器或者巨磁阻传感器)或者霍尔传感器。此外,当然也可以具有另外的、能够检测磁场m的传感器类型。不同类型的传感器也能够以不同的方式表示磁场m的量(如果检测到这个量的话)。霍尔传感器例如提供一个表示磁场强度的值(例如特斯拉),其中霍尔传感器通常不在饱和状态下运行。而磁阻传感器提供一个确定的值域内的值,例如在0与1之间,然而该传感器通常饱和运行。就是说,这样的传感器为一个广域的磁场强度提供例如值1。因此,通常利用一个这样的传感器无法获得磁场m的磁场强度的绝对值,而是只能得出相应的传感器类型是否位于饱和区域中的结论。
25.在图2中示例性地示出了可运动构件2上的位置磁铁pk的设置单元的磁场m,形式上为磁力线。可以看出,磁场m在磁极的中心最强,而向着边缘迅速减弱。同样可以看到,磁场m在周围区域中、即在与位置磁铁pk具有较大间距时比较迅速地大幅下降。因此,如果位置传感器sn与位置磁铁pk之间的气隙不超过极距tp的一半的话,有利于提高测量的可靠性。
26.一个位置传感器sn例如提供一个正弦曲线和余弦曲线(形式上为电压测量值u)作为传感器信号,如在图3中示出的那样。众所周知,可以根据磁场m的角度γ、即磁场m撞击在位置传感器sn上的角度,从传感器信号(例如形式上为电压u)(正弦曲线和余弦曲线)中,线性近似地求出一个单个可运动位置磁铁pk的与磁场m的磁场角γ成比例的位置x,例如x=k
*
arctan(sin(2γ)/cos(2γ)),其中k为常数因子,例如k=p/(2π)。然而,位置传感器sn当然也可以作为传感器响应sa直接提供位置x,或者然后被分析评估的正弦曲线和余弦曲线,或者一个角度信息γ。位置传感器sn同样可以(根据传感器的类型)作为传感器响应sa提供
一个用于磁场m的量的绝对值|a|(正弦曲线和余弦曲线的振幅),例如作为因此传感器响应sa也可以包含多个变量,例如角度信息γ和绝对值|a|。
27.如果一个位置磁铁pk在一个位置传感器sn旁边运动经过的话,根据位置磁铁pk相对于位置传感器sn的位置x,产生角度信息γ的在0与2π之间(取决于传感器的值)的典型的锯齿状曲线并且产生绝对值|a|的曲线,如在图4中示出的那样。如果位置传感器sn如例如在一个磁阻传感器的情况中那样在饱和状态下运行的话,绝对值|a|在此大部分可以是恒定的。在其它的传感器类型、例如霍尔传感器的情况中,也可以产生绝对值|a|的不同曲线。不同的传感器类型也可以提供不同的、代表测得的磁场的传感器信号和/或传感器响应sa。
28.如果可运动构件2(例如如在图1中示出的那样)上的位置磁铁pk(k>1)的设置单元从一个位置传感器sn旁边运动经过的话,因此关于可运动构件2相对于固定不动构件1的相对位置xr,产生角度信息γ的一个锯齿状曲线和/或绝对值|a|的曲线,如在图5中在针对k=5个位置磁铁pk示出的那样。
29.角度信息γ的值也可以利用一个常数因子按比例缩放。例如可以规定,位置传感器sn在位置磁铁pk中心处为角度信息γ提供值π/2。根据图4,值π是预期的。因此利用因子-π/2对其按比例缩放。当传感器测量位置磁铁pk的边缘时,因此产生3π/2,并且在位置磁铁pk的1/4处提供值0。这样的按比例缩放也是为什么在图5中在五个位置磁铁pk的情况下角度信息γ的曲线中却包含六个锯齿形顶点的原因。然而,一个这样的按比例缩放对于本发明来说并不重要,只须了解它并统一应用。
30.在图5中还可以看到角度信息γ的非线性的曲线,特别是在可运动构件2的边缘区域中,还可以看到位置磁铁pk的设置单元的边缘上的磁场扩大(在边缘处产生更宽的锯齿形顶点)作为如在图2中示出的磁场m的结果。
31.在此,在可运动构件2与位置传感器sn之间的相对位置xr是针对可运动构件2的一个任意点而言,例如针对可运动构件2的或者位置磁铁pk的设置单元的中心(沿着运动方向观察)或者一个端部而言。在图2中,例如位置磁铁pk的设置单元的中心被选为相对位置xr的零点,如通过可运动部件2的虚线画出的移动位置所示出的那样。因此将根据可运动构件相对固定不动的位置传感器sn的位置得出相对位置xr针对所选出的零点的正值和负值。相对位置xr表示可运动构件2相对一个位置传感器sn的位置。
32.如果可运动构件2的位置x(i)(无论是作为绝对位置还是相对位置)在当前的探测时间点(i)中(在哪个时间段中确定位置)才是已知的话,那么可以从求出的前一个探测时间点(i-1)的位置x(i-1)中容易地求出当前的位置x(i),例如从可运动构件2的已知运动中。然而主要问题在于,不依赖前一个探测时间点(i-1)的位置x(i-1)的信息,即例如和特别是在系统接通或者加速运行时的初期,确定位置x(i)。
33.在接通或者加速运行时,尽管能够读取在固定不动构件1上的所有位置传感器sn,但是不能确定利用一个确定的位置传感器sn检测的是可运动构件2的哪个位置磁铁pk。可运动构件2上的每个位置磁铁pk都能够在一个确定的位置传感器sn中引起同样的传感器响应sa,例如同样的角度信息γ。利用一个位置传感器sn测得的传感器响应sa因此是非一一对应的(非单义的或多义的)。为了解决这个多义性和即使在这样的情况中也使可靠的定位成为可能,根据本发明进行如下操作。
34.为了一个可运动构件2上的位置磁铁pk的已知设置单元(位置磁铁pk的极长p、极距tp、定向和极性等等)与一个固定不动构件1上的一个确定的已知的位置传感器sn(传感器类型、传感器与位置磁铁的间距等等)的事先规定的组合,可以确定一个传感器模型sm,该传感器模型确定与可运动构件2相对于固定不动构件1或者位置传感器sn的相对位置xr相关的传感器模型响应sa
*
,例如角度信息γ
*
和/或绝对值|a|
*
。对于角度信息γ
*
和绝对值|a|
*
来说,传感器模型sm例如对应于这些变量的曲线,如在图5中示出的那样。因此传感器模型sm提供,利用一个确定的位置传感器sn在一个确定的可运动构件2的不同的相对位置xr中可以预期得到传感器响应sa的哪些值。可以通过如下方式为位置磁铁pk的设置单元与一个位置传感器sn的确定的组合例如通过测量技术求出一个这样的传感器模型sm,即,使位置磁铁pk的设置单元运动经过位置传感器sn并且同时检测并存储传感器模型响应sa
*
。然而,同样也可以通过模拟或者计算确定传感器模型sm。同时也可以检测传感器模型响应sa
*
。这个传感器模型sm被存储。
35.因此通过如下方式确定传感器模型sm,即,当多个位置磁铁pk的整个设置单元运动经过固定不动构件1的位置传感器sn时,检测传感器模型响应sa
*
的曲线。在运动经过期间,检测位置传感器sn的传感器响应sa作为传感器模型响应sa
*
。因此,传感器模型sm与固定不动构件上的位置传感器sn的设置单元断开联接,因为只检测针对一个位置传感器sn的传感器模型响应sa
*
。
36.如果存在多个不同的可运动构件2的话,其例如具有不同数量的位置磁铁pk,如例如在一个长定子直线电机或者平面电机中很常见的那样,或者当不同的位置传感器sn设置在固定不动构件1上时,当然为位置磁铁pk的设置单元与一个位置传感器sn的每个可能的组合都具有一个所属的传感器模型sm。
37.当然为了一个确定的运动系统,只须对一个传感器模型sm或者多个传感器模型sm测定一次。因此作为已知的和既存的,传感器模型sm可以视为用于实施定位方法的先决条件。
38.可以如在图5中示出,传感器模型sm存储为与相对位置xr相关的传感器模型响应sa
*
的值、即例如角度信息γ
*
和/或绝对值|a|
*
的值的形式。然而,这会需要很多存储空间,特别是如果传感器模型sm应该以相对位置xr和/或传感器模型响应sa
*
的高分辨率存储的话。
39.出于这个原因,也能够以其它的形式存储传感器模型响应sa
*
的传感器模型sm,如借助图6说明的那样。根据图5的传感器模型sm以位置增量
△
x离散,并且将具有高度z(例如2π)的角度信息γ
*
的锯齿形曲线的溢出(与位置磁铁pk的数量相关的数量)在相对位置xr上相加。这产生了图6中的角度信息γ1的离散曲线。在这个离散曲线中近似出一个尽可能平滑的曲线,例如一个多项式序列(样条曲线)或者一个其它适合的平滑曲线。众所周知,样条曲线是一个函数,该函数分段地由一定程度的多项式构成,其中离散点可以是样条曲线的插值点。然后可以将通过曲线近似出的角度信息γ2作为传感器模型sm以选择的曲线的数学说明的形式存储,这需要的存储空间少得多。通过使用模函数modstu能够从近似出的角度信息γ2中容易地算出角度信息γ
*
的锯齿形曲线,即γ
*
(xr)=γ2(xr)mod z(例如z=2π)。
40.同样可以利用位置增量
△
x使传感器模型sm中的绝对值|a|
*
的曲线离散,以获得
插值点,在这些插值点中然后可以近似出一个平滑的曲线,例如又是一个样条曲线。因此也可以节省存储空间地将绝对值|a|
*
的曲线以曲线的数学描述的形式存储。在这个情况中,可以直接从存储的曲线中求出对于一个确定的相对位置xr而言的绝对值|a|
*
的值。
41.在其它或者额外的传感器响应sa或者传感器模型sm的传感器模型响应sa
*
的情况中也可以以相同的方式进行操作。
42.在图7中示出了一个具有若干位置磁铁pk的可运动部件2,该可运动部件处于相对于具有位置传感器sn的固定不动构件1的一定的相对位置xr中。在可运动构件2的这个相对位置xr中,可运动构件2上的位置磁铁pk的磁场m引起可运动构件2的区域内的一定数量的位置传感器sn的传感器响应sa。有多少位置传感器sn响应,自然取决于传感器间距s,也取决于磁场强度。为了位置确定,优选只考虑响应的位置传感器sn。在这种情况下,可以-例如为绝对值|a|-规定一个传感器响应sa的极限值,从该极限值起将一个位置传感器sn的一个传感器响应sa考虑为测量值。然而也可以始终考虑可运动构件2的区域中的事先规定数量的位置传感器sn。为了位置确定或定位而考虑的j个位置传感器snj通常是现有位置传感器sn中的部分数量。
43.如果观察一个位置传感器sn的话,那么这个位置传感器根据一个磁场m被测量的位置磁铁pk相对于位置传感器sn(如在图4中示出的那样)的位置提供一个相应的传感器响应san,例如角度信息γn和绝对值|a|n。其它被考虑的位置传感器sn-1、sn 1同样提供传感器响应,例如角度信息γn-1、γn 1和绝对值|a|n-1、|a|n 1。所有j≥1个被考虑的位置传感器snj分别提供一个传感器响应saj。
44.此外,用于这个可运动构件2和现有的位置传感器sn的传感器模型sm是已知的。任务目前是如此确定可运动构件2的相对位置xr,使得来自传感器模型sm的、被考虑的位置传感器snj的传感器模型响应sa
*j
尽可能好地与被考虑的位置传感器snj的实际测得的传感器响应saj一致。
45.可运动构件2的一个确定的相对位置xr因此从传感器模型sm中提供被考虑的位置传感器snj的传感器模型响应
46.将这些传感器模型响应与利用被考虑的位置传感器snj实际测得的传感器响应saj进行比较。为此改变可运动构件2的相对位置xr,并且从传感器模型sm中为每个改变的相对位置x
rv
确定传感器模型响应当然,这个改变仅仅是假设的,并且可运动构件2并不为此在固定不动构件1上进行物理运动。具有在来自传感器模型sm的传感器模型响应与实际测得的传感器响应saj之间的最小偏差的那个相对位置x
rv
然后被用于确定可运动构件2相对于固定不动构件1的相对位置xr。
47.然后,基于确定的相对位置xr,利用可运动构件2的和固定不动构件1的已知的几何形状和利用位置传感器sn的已知的安装位置,能够容易地求出绝对位置xa。绝对位置xa是针对事先给定的、固定不动的基准点rp而言(图7),该基准点可以规定在一个任意位置上,通常是固定不动构件1上的一个点。位置传感器sn的安装位置x
sn
是已知的。因此例如可以容易地由xa=x
sn
xr计算出绝对位置xa。然而,绝对位置xa当然也可以是针对可运动构件2的任何其它的任意点而言。
48.为了实施通过不同方式定位的方法,如下面说明的那样可以改变可运动构件2的相对位置x
rv
。为了以下的说明,将角度信息γ和绝对值|a|假设为传感器响应sa。然而,为了本发明,也可以只将这些变量中的一个用作传感器响应sa,或者也可以使用一个由位置传感器sn提供的其它变量或者由位置传感器sn提供的额外变量。所使用的传感器响应sa可以直接由位置传感器sn提供,或者也可以从位置传感器sn提供的传感器信号(如例如在图3中那样)中求出,例如在一个计算单元5中。
49.为了求出一个可运动构件2的相对位置xr(或者绝对位置xa),使用一个具有若干j个位置传感器snj的组。当然使用那些提供传感器响应saj的位置触感器snj,这些位置传感器因此位于一个可运动构件2的区域中。在根据图7的示例中,例如可以使用位置传感器sn-2、sn-1、sn、sn 1、sn 2。然而,作为备选方案,也可以只使用位置传感器sn-2、sn-1、sn或者位置传感器sn、sn 1,或者其它的位置传感器。所使用的位置传感器snj也不一定必须是直接相邻的位置传感器sn。
50.为了确定可运动构件2的相对位置xr所使用的位置传感器snj因此-例如在系统加速运行时-提供传感器响应saj,例如对于可运动构件2的一个任意的相对位置x
rv
,可以从传感器模型sm中为每个位置传感器snj求出一个传感器模型响应例如
51.为了确定可运动构件2相对于固定不动构件1的相对位置xr,针对改变的相对位置x
rv
将利用被考虑的位置传感器snj测得的传感器响应saj与对传感器模型响应进行比较。
52.在被考虑的位置传感器snj的传感器模型响应与利用被考虑的位置传感器snj实际测得的传感器响应saj最接近时的那个改变的相对位置x
rv
被用作可运动构件2的相对位置xr,或者用于求出相对位置xr(例如当这个相对位置是针对可运动构件2的一个其它的点时)或者可运动构件9的绝对位置xa。
53.为了传感器响应saj与传感器模型响应的比较,可以将一个成本函数j用作传感器响应saj和传感器模型响应的函数,即该成本函数对测得的传感器响应saj与被考虑的位置传感器snj的传感器模型响应之间的偏差进行评估。成本函数j优选对所有j个被考虑的位置传感器snj进行评估。成本函数j能够例如容易地制定为一个差值的量,例如或者制定为平方误差,例如以的形式,或者以任意其它合适的形式制定。如果传感器响应sa是一个由多个变量构成的向量的话,例如如上由角度信息γ和绝对值|a|构成,那么可以使用一个任意范数,例如欧几里得范数||||2,即例如
54.改变的相对位置中的对成本函数的值进行优化(即要么最小化,要么最大化)的那个相对位置于是是所寻找的相对位置xr或者用于求出/确定可运动构件2的相对位置xr或者绝对位置xa。
55.在第一构造设计中,可以以小的位置增量
△
xr改变相对位置x
rv
。位置增量
△
xr越小,分辨率就越高。在哪个区域中改变相对位置x
rv
可以-例如根据可运动构件2的已知几何尺寸和/或已知的传感器间距s-事先给定。在图8中例如示出了这样的改变时的成本函数j。于是,事先给定的区域中的成本函数j的最小值上的位置是所寻找的相对位置xr或者用于求出/确定可运动构件2的相对位置xr或者绝对位置xa。
56.然而,定位的一个可能的第二构造设计是更加有利的。如果k表示可运动构件2上的位置磁铁pk的数量的话,那么所使用的位置传感器snj中的一个确定的位置传感器能够检测这些k个位置磁铁pk之一的磁场。因此,为了涵盖可运动构件2的所有可能的位置,只须改变可运动构件2,改变量为k个极距tp。因此能够明显减少需改变的相对位置x
rv
的数量,而不损害定位准确性。即使在这个情况中,也针对改变的相对位置x
rv
中的每一个获得一个用于成本函数j的值。于是,成本函数j的值最佳的(要么最小,要么最大)那个相对位置x
rv
是所寻找的相对位置xr,或者用于求出或确定可运动构件2的相对位置xr或者绝对位置xa。
57.还可以进一步减少需改变的相对位置x
rv
的数量。例如,可以忽略附属的绝对值|a|低于一个确定的极限的那些相对位置x
rv
。
58.在另一个可能的构造设计中,可以根据相对位置x
rv
在数学优化中对成本函数j进行优化(最小化或者最大化)。在数学上,可以以行优化(最小化或者最大化)。在数学上,可以以的形式表示这一点。在此,由优化算法得出改变的相对位置x
rv
,例如牛顿法、梯度法、进化算法等等。通过优化算法,迭代地如此改变相对位置x
rv
,使得成本函数j接近最小值或者最大值并且因此得到优化。迭代的第一相对位置x
rv
可以任意地或者通过所应用的优化法事先给定。为此,还事先给定一个终止标准,就是说,迭代地重复优化,直到达到所述终止标准为止。一个可能的终止标准是低于(或者高于)一个事先给定的成本函数阈值或者低于两个相继的迭代的成本函数j的值的事先给定的偏差。
59.也可以将具有位置传感器snj的多个不同的组用于定位。确定的位置传感器snj也可以包含在多个组中,然而这些组分别以至少一个位置传感器snj区分。在图7的示例中,例如第一组可以包括位置传感器sn-1、sn、sn 1,而第二组可以包括位置传感器sn、sn 1、sn 2。组中的位置传感器snj的数量不必一致,就是说,第一组可以包括例如两个位置传感器snj,而另一个组可以包括三个位置传感器snj。
60.因此,可以利用一种方法通过改变相对位置x
rv
为每组位置传感器snj如上所述地优化一个成本函数j。现在可以选择一个组,并将成本函数j的值对于这个组是最佳的(要么最小,要么最大)那个相对位置x
rv
(或者一般来说,在传感器模型响应与测得的传感器响应之间的偏差最小的那个相对位置x
rv
)用作所寻找的相对位置xr或者用于求出或确定可运动构件2的相对位置xr或者绝对位置xa。作为利用其它的组对成本函数进行优化的结果,然后可以用于检查可运动构件2的相对位置xr(或者绝对位置xa)的求出的可信度。例如两个求出的位置的偏差不可超过一个确定的值。例如可以选择成本函数j的值最小的那一组,不采用
其它的组或者将其它的组用于可信度检查。
61.如果存在多个不同的传感器模型sm的话,例如因为具有不同的可运动构件2的缘故,那么可以为每个传感器模型sm实施上述方法,即例如基于每个传感器模型sm进行优化。因此,这个方法不仅提供可运动构件2的相对位置xr,而且还提供是哪个可运动构件2的信息。例如在对一个成本函数j进行优化的情况中,该成本函数j利用传感器模型sm中的一个变得最小,以此可以得出可运动构件2就是作为这个传感器模型sm的基础的那个可运动构件的结论。
62.如果存在一个单个的可运动构件2或者一个离其它可运动构件足够远的可运动构件2的话,那么成本函数j的最小值将接近零(取决于传感器模型sm的精度和位置传感器snj的安装位置的精度)。
63.然而,即使在两个可运动构件2相互靠近甚至互相直接贴合的情况中,本发明的定位方法也发挥作用。“靠近”在此是指一个布置,在该布置中两个可运动构件2的磁场m在位置传感器sn的测量精度方面相互影响。由于磁场m在位置磁铁pk之外大幅减弱之故,可以假设,只在可运动构件2的边缘区域中产生影响。在该影响的范围内,来自用于一个位置传感器snj的传感器模型sm(该传感器模型就是为了一个隔离的位置传感器sn而确定的)的传感器模型响应sa
*
将更加偏离利用这个位置传感器测得的传感器响应sa。然而,因为在可运动构件2上设置有多个位置磁铁pk,并且为了位置确定总是考虑到多个位置传感器snj,所以存在这样的位置传感器snj,对于这些位置传感器而言能够找到来自传感器模型sm的传感器模型响应sa
*
与测得的传感器响应sa的高度一致。该一致足以求出/确定相对位置xr。甚至在两个以上的可运动构件2相互靠近或者直接邻接的情况中,这依然发挥作用。因此也可以容易地确定多个相互靠近或者直接邻接的可运动构件2的相对位置xr(或者绝对位置xa)。由于通过传感器模型sm还表示了可运动构件2的特征,所以可以额外地获得哪些可运动构件2相互靠近或者直接邻接的信息。
64.作为补充方案,还可以实施可信度检查,特别是在可运动构件2相互靠近或者直接邻接的情况中。如果从两个相邻的可运动构件2的、求出的相对位置xr(或者绝对位置xa)中得知这些可运动构件2将重叠的话,那么位置确定中的错误是显而易见的。由于可运动构件2的几何形状是已知的,所以能够容易地实施一个这样的可信度检查。如果为位置确定使用多组位置传感器snj的话,那么例如可以将可运动构件2的已知尺寸用于选择一个用于位置确定的组。例如,可以利用可运动构件2的已知尺寸选择成本函数j(该成本函数不必一定具有最小值),该成本函数使位置确定的结果具有可信度。
65.在长定子直线电机10的情况中,通常具有定子结构,在这些定子结构中长定子直线电机10的两个固定不动构件1在一个分路器w上集合,或者一个固定不动构件1在一个分路器w上被分为两个固定不动构件1(根据可运动构件2的运动方向),如在图9中示出的那样。在分路器w的区域中,可运动构件2因此可以在两个参与的固定不动构件1之一上被引导。利用所述方法,甚至可以在分路器w的区域中实施定位。
66.可以预期,可运动构件2的一个传感器模型sm能够与分路器w的一个固定不动构件1上的测得的传感器响应sa比在分路器w的另一个固定不动构件1上更加一致,因为在分路器w的区域中在位置传感器sn与位置磁铁pk之间的气隙是不同的(这又导致位置传感器sn上的磁场不同)。在应用成本函数j的情况中,用于一个参与分路器w的固定不动构件1的成
本函数将比用于另一个参与分路器w的固定构件1的成本函数更小(或者更大),因为测得的传感器响应sa由于更大的气隙会更加偏离传感器模型响应sa
*
。通过这种方式,利用本位置确定方法也可以在分路器w的区域内确定该分路器w中的可运动构件2的相对位置xr(或者绝对位置xa)。作为补充方案,在此同时也可以确定可运动构件2目前位于参与分路器w的固定不动构件1中的哪一个上。
67.可以在一个计算单元5中实施所述位置确定方法。计算单元5为此从位置传感器sn获得所需要的传感器响应sa(如在图1中示出的那样)。计算单元5可以是运动系统的控制系统的组成部分,或者也可以集成在这样的控制系统中。计算单元5优选是基于微处理器的,例如计算机、dsp(digital signal processor(数字信号处理器))、plc(programmable logic controller(可编程逻辑控制器))等等,并且用于位置确定的方法可以实现为软件并且为了执行而存储在计算单元5上。然而,计算单元5也可以是一个asic(application specific integrated circuit(特定用途集成电路))或者一个fpga(field programmable gate array(现场可编程门阵列)),其中也可以集成一个微处理器。也可以将任何其它合适的硬件用作计算单元5。实施所需的传感器模型sm可以存储在计算单元5的一个存储单元6中。存储单元6中也可以存储另外可能需要的数据,例如可运动构件2的几何形状、位置传感器sn的安装位置等。计算单元5也可以包括已知的输入/输出装置,和/或用于与其它组件(例如运动系统的控制系统)进行数据通信的数据接口,例如通过现场总线,如以太网powerlink、devicenet、profibus、can等,或者其它的总线系统,如以太网等等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。