气动或液压动力组织闭合设备
相关文献的交叉引用
1.本技术根据35u.s.c.
§
119主张于2019年11月20日提交的美国临时专利申请no.62/937,980的优先权,该申请出于所有目的通过引用全部纳入本文。
技术领域
2.本公开涉及组织缺陷的治疗,更具体地涉及用于辅助组织闭合的系统、设备和方法。
背景技术:
3.在一些医疗手术中,将组织的一部分固定地连接到组织的另一部分上是有益的,诸如将伤口或受损组织保持在一起。例如,可使用一个或多个缝合线或缝合钉来连接组织部分。通常情况下,包括缝合钉或针,以及与针联接的缝合线在内的组件被用来将组织固定在一起。
4.此外,对于组织切除或各种减肥手术,缝合和钉合闭合方法都是可取的。缝合和钉合系统的一个缺点是向系统远端的可传递力的挑战。正是考虑到这些因素,本发明的设备、系统和方法可以实现各种有利的医疗结果。
技术实现要素:
5.在一个或多个实施例中,医疗设备可以包括能操作以闭合目标组织中的开口的内窥镜设备和能与内窥镜设备一起操作的致动器,该致动器包括腔室内的活塞。活塞可包括与腔室内表面接合的活塞头,以及与内窥镜设备的组织接合部件联接的活塞杆,其中来自腔室内流体的压力致动组织接合部件。在一些实施例中,该流体是气体或液体。在一些实施例中,致动器进一步包括一个能操作以允许流体进入腔室的阀门,其中该阀门控制流体通过入口导管和出口导管的流动,并且其中入口导管和出口导管与腔室流体地连接。在一些实施例中,组织接合部件是针穿引器或内窥镜吻合器头部。在一些实施例中,内窥镜设备是缝合设备,该缝合设备包括一个细长构件,以及位于细长构件一端处的缝合臂,其中针穿引器能操作地在细长构件和缝合臂的远端之间输送针,以缝合目标组织。在一些实施例中,活塞杆被设置在细长构件的内部,并且其中活塞杆被联接到针穿引器。在一些实施例中,腔室内的流体冲击活塞头,以在轴向方向致动活塞杆和针穿引器。在一些实施例中,内窥镜吻合器头部可包括与第二钳口相对的第一钳口,其中活塞杆被联接到第一钳口,以及沿第二钳口的钉仓,其中活塞杆的移动使得第一钳口与钉仓进行接触或断开接触。在一些实施例中,致动器可进一步包括第二腔室内的第二活塞,其中第二腔室与第一腔室流体地连接,并且其中第一腔室的第一直径大于第二腔室的第二直径。在一些实施例中,第二活塞可包括与第二腔室的内表面接合的第二活塞头,以及从第二活塞头延伸的第二活塞杆,其中第二活塞头面向活塞头。
6.在一个或多个实施例中,系统可以包括内窥镜和包括能操作以闭合目标组织中的
开口的致动器的设备。该致动器可包括腔内的活塞,该活塞包括与腔室内表面接合的活塞头,以及与内窥镜设备的组织接合部件联接的活塞杆,其中来自腔室内的流体的压力致动活塞杆和组织接合部件。在一些实施例中,致动器可进一步包括能操作以允许流体进入腔室的阀门,其中该阀门控制流体通过与腔室流体连接的入口导管和出口导管的流动。在一些实施例中,该设备可进一步包括缝合针穿引器或内窥镜吻合器头部。在一些实施例中,该设备可以是缝合设备,其中缝合设备包括细长构件和位于细长构件的一端处的缝合臂,其中组织接合部件是针穿引器,其能操作以在细长构件和缝合臂的远端之间输送针,以便缝合目标组织。在一些实施例中,该设备可以是吻合器头部,该吻合器头部包括与第二钳口相对的第一钳口,其中活塞杆被联接到第一钳口,以及沿第二钳口的钉仓,其中活塞杆的移动使第一钳口与钉仓进行接触或断开接触。在一些实施例中,致动器可进一步包括第二腔室内的第二活塞,其中第二腔室与第一腔室流体地连接,并且其中活塞头的第一直径大于第二活塞的第二活塞头的第二直径。
7.在一个或多个实施例中,一种方法可以包括将内窥镜医疗设备插入患者体内,该内窥镜医疗设备包括能操作以接合目标组织的内窥镜设备,以及与该内窥镜设备联接的致动器,该致动器包括腔室内的活塞。活塞可包括与腔室的内表面接合的活塞头,以及与内窥镜设备的组织接合部件联接的活塞杆。该方法可进一步包括控制腔室内的流体量,以相对于目标组织致动活塞杆和组织接合部件,并使目标组织与组织接合部件接合,以闭合目标组织的开口。该方法可进一步包括使用缝合设备接合目标组织,该缝合设备包括细长构件和位于细长构件一端处的缝合臂,其中组织接合部件是包含针的针穿引器。该方法可进一步包括在细长构件和缝合臂的远端之间输送针,以闭合目标组织的开口。该方法可进一步包括使用吻合器头部接合目标组织,吻合器头部包括与第二钳口相对的第一钳口,其中活塞杆与第一钳口联接,并致动活塞杆以围绕目标组织闭合第一钳口和第二钳口,从而闭合目标组织的开口。该方法可进一步包括在第二腔室内提供第二活塞,其中第二腔室与第一腔室流体地连接,并且其中活塞头的第一直径大于第二活塞的第二活塞头的第二直径,以及致动第二活塞以增加第二腔室和腔室中的流体的压力。
8.上面总结的各种一个或多个特征,可以与上面总结的其他特征互换、交换、组合或替代,以用于上面总结的医疗系统和方法,以及关于下面更详细描述的实施例和本公开范围内的其他实施例。
附图说明
9.本公开的非限制性实施例通过参考附图的方式进行描述,这些附图不旨在按比例绘制。在附图中,所说明的每个相同或几乎相同的部件通常用一个数字表示。为了清楚起见,并非每个部件都在每个附图中标出,也不是每个实施例的每个部件都显示在不需要说明的地方,以使本领域的普通技术人员能够理解本公开内容。此外,一些附图包括“切片”形式的截面剖视图,或“近视的”截面剖视图,为了说明清楚,省略了在“真正的”截面剖视图中以其他方式可见的某些背景线或特征。在附图中:
10.图1是根据本公开的实施例的医疗设备的致动器的侧截面剖视图;
11.图2a是根据本公开的实施例的第一状态中的内窥镜设备的侧视图;
12.图2b是根据本公开的实施例的图2a的内窥镜设备在第二状态中的侧视图;
13.图3是根据本公开的实施例的另一个用于医疗设备的致动器的侧截面剖视图;
14.图4a是根据本公开的实施例的第一状态中的内窥镜设备的侧视图;
15.图4b是根据本公开的实施例的图4a的内窥镜设备在第二状态中的侧视图;
16.图5是根据本公开的实施例的内窥镜吻合器头部的立体图;
17.图6是根据本公开的实施例的内窥镜吻合器头部的立体图;以及
18.图7是根据本公开的实施例的方法的流程图。
具体实施方式
19.本公开内容不限于本文描述的特定实施例。本文使用的术语仅用于描述特定的实施例,并不旨在超出所附权利要求的范围进行限制。除非另有定义,本文使用的所有技术术语与本公开内容本领域的普通技术人员通常理解的含义相同。
20.医学的一个趋势包括从腹腔镜和开放性外科手术转向小型化的内窥镜手术。内窥镜医生可以在无创和直接可视化的情况下进行越来越复杂的手术。因此,对具有特定内置治疗能力的内窥镜医疗设备的存在需求。这种医疗设备将促进医院中更普遍的广泛的手术干预,并进一步导致开发明显更复杂和更有能力的镜体设计。
21.本发明的实施例通过将复杂的功能整合到一次性使用的镜体或可重复使用的内窥镜中,至少解决了上述的不足之处。例如,根据本公开的系统、医疗设备和方法所提供的功能可包括以下中的一项或多项:缝合、钉合、切割、烧灼、夹子部署、注射、组织操作等等。此外,通过仅单次使用本文公开的缝合设备,可以大大降低感染风险。
22.本公开涉及医疗设备,例如内窥镜、胃镜、支气管镜、结肠镜、输尿管镜、内窥镜吻合器头部等,具有用于获取、操作和闭合目标组织的开口的集成功能。尽管本文描述了一次性使用的内窥镜医疗设备,但可以理解的是,本公开的实施例也可以包括在可重复使用的医疗设备如内窥镜中。本文的实施例通过将复杂的功能集成到单个的医疗设备中,至少解决了上述的不足之处。
23.此外,本文的实施例至少解决了现有技术的上述缺陷,诸如致动吻合器头部或推动针穿过组织所需的力的升高水平。现有技术系统使用拉线或操作员可以通过推动和/或拉动导管或类似物施加的力。这些现有技术的致动方法在曲折的解剖结构中可能是不可靠的,向设备的远端转换的力太小,和/或使操作者感到疲劳。本发明的实施例通过将气动和/或液压技术引入缝合或钉合设备,能够在医疗设备的远端处实现所需的更大的力。气动和液压装置可以增加施加在近端处的用户接口上的力,从而使远端机构更容易刺穿组织或类似物。本文包括的实施例描述了支持缝合设备或基于钉合设备的各种构造。然而,可以认识到,最终用途并非如此有限,一般的想法和设计可以应用于许多需要类似的力和运动的类似设备和末端执行器。
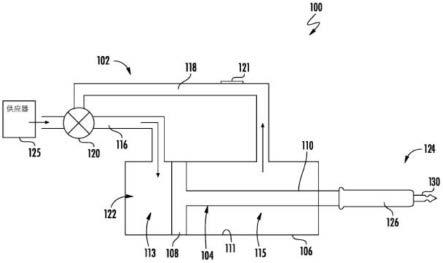
24.参照图1,将描述根据本公开的实施例的系统或内窥镜医疗设备(以下简称“设备”)100的致动器102。如图所示,致动器102可以包括在腔室106内的活塞104,该活塞104具有与活塞杆110连接的活塞头108。活塞头108可与腔室106的内表面111接合,一般地将腔室106分为第一部分113和第二部分115。如图所示,腔室106的第一部分113可与入口导管116流体地连接,而腔室106的第二部分115可与出口导管118流体地连接。在一些实施例中,腔室106的第一部分113和第二部分115之间的压力差将使活塞104在腔室106内沿轴向移动
(例如,图中的左或右)。
25.致动器102可以进一步包括能操作以允许来自流体供应器125的流体122进入和离开腔室106的阀门120。更具体地说,阀门120可以控制流体122通过入口导管116和出口导管118的流动。虽然未示出,但阀门120可以在设备100的手柄或用户接口处控制。在一些实施例中,出口导管118可以包括一个或多个泄压阀121,而入口导管116可以连接到流体供应器125,用于将流体122输送到腔室106。虽然是非限制性的,但流体122可以是加压空气或co2。
26.如图所示,活塞杆110可以联接到组织接合部件124。在非限制性实施例中,如图2a和2b所示,组织接合部件124可以是内窥镜设备的针穿引器126,诸如缝合设备131。在一些实施例中,针穿引器126可以包含或联接到能操作以接合目标组织的针130。设备100可以进一步包括缝合设备131,其与致动器102的活塞杆110联接。在一些实施例中,缝合设备131可包括与缝合臂136联接或与之一体形成的细长构件134。该细长构件134可以是柔性的空心管、内窥镜、导管等,并可以包括与远端138相对的近端137。在一些实施例中,细长构件134可以是一种柔性材料,如硅胶、包括聚酰胺和聚醚骨架块的热塑性弹性体、聚氨酯等,以允许镜体弯曲。在其他实施例中,细长构件134可以是刚性材料,如聚碳酸酯、丙烯腈-丁二烯-苯乙烯(abs)等,以提供更直接的定位响应。
27.在一些实施例中,缝合臂136可以是远侧组件的一部分,其包括具有从细长构件134的远端138延伸的近侧部段142的主体141。近侧部段142和细长构件134可以整体连接,从而使主体141和细长构件134形成一个整体的、一次性使用的设备。在其他实施例中,远侧组件可以与一次性使用或可重复使用的设备的细长构件134可拆卸地联接。
28.如进一步所示,缝合臂136可延伸至端盖143,其被配置为可释放地接合和脱离针130。在一些实施例中,针130可通过针穿引器126在细长构件134的远端138和位于缝合臂136的远端145处的端盖143之间输送。针130可与用于拉紧和闭合保留在由缝合臂136限定的缝合空腔147内的目标组织146(图2a)中的开口的缝合线(未示出)相连接。
29.参照图1、2a和2b,将更详细地描述设备100的操作。在一些实施例中,设备100可以是采用可压缩流体,诸如空气,来驱动活塞104的操作的气动设备。最初,如图2a所示,针穿引器126和针130可以凹陷在邻近主体141的近侧部段142的位置。一旦目标组织146被保留在缝合空腔147内,例如,由通过主体141的通道输送的组织抓取器(未示出),阀门120可被打开,以使腔室106的第一部分113内的流体122的体积增加。当流体122的体积的增加时,活塞头108上的压力增加,使得活塞104、针穿引器126和针130朝向目标组织146偏置。如图2b所示,随后针130在被保留在端盖143内之前,可以刺穿目标组织146。根据组织开口的大小和类型,针130可以在缝合臂136的近侧部段142和远端145之间来回通过,包括一个或多个尖头的针130用于每次通过时刺穿目标组织146。
30.现在转向图3,将更详细地描述根据本公开的实施例的内窥镜医疗设备(以下简称“设备”)200的致动器202。如图所示,致动器202可包括第一腔室206内的第一活塞204,第一活塞204具有与第一活塞杆210连接的第一活塞头208。第一活塞头208可以延伸跨过第一腔室206的整个内部区域,与其中的内表面211相接合。如图所示,第一活塞头208一般可将第一腔室206分成第一部分213和第二部分215。
31.如图所示,第一腔室206的第一部分213可与包含第二活塞252的第二腔室250流体地连接。第二活塞252可包括与第二腔室250的内表面256接合的第二活塞头254,以及从第
二活塞头254延伸的第二活塞杆258。在一些实施例中,第二活塞杆258可以延伸到第二腔室250的外部。如图所示,第二活塞头254面向第一活塞头208。
32.在一些实施例中,第一腔室206的第一直径'd1'大于第二腔室250的第二直径'd2',从而在第一活塞204和第二活塞252的使用期间提供机械优势,或力的倍增。可以理解的是,设备200可以是液压装置,其采用不可压缩的液压液体,诸如油或水以驱动第一活塞204和第二活塞252的操作。在使用过程中,第二活塞252上较小的输入力会导致第一活塞204上较大的输出力,从而减少用户所需的初始力。在一些实施例中,第二活塞252可以由位于用户界面(未示出)处的任何种类的致动器(例如,杠杆)控制。此外,在其他实施例中,可以采用一个或多个附加的活塞,以提供更多的力倍增。
33.现在参考图3、4a和4b,将描述根据本公开的实施例的内窥镜吻合器头部260。如图所示,第一活塞杆210可与内窥镜吻合器头部260联接。在非限制性的实施例中,内窥镜吻合器头部260包括与第二钳口264相对的第一钳口262。第一钳口262和/或第二钳口264可与第一活塞杆210联接,例如,通过一个或多个机械连杆266(图3)将吻合器头部260连接到致动器202。
34.在一些实施例中,内窥镜吻合器头部260可以包括沿着第二钳口264的内部的钉仓268,其中第一活塞杆210的运动使得第一钳口262(有时被称为砧座)与钉仓268接合或脱离。第一钳口262和第二钳口264彼此枢轴地附接,以将目标组织(未示出)夹持在钉仓268上。更具体地说,内窥镜吻合器头部260可被设置在初始位置,如图4a所示,在其中第一活塞杆210和机械连杆266可沿第一方向273(例如,朝向手柄或用户接口)拉回。机械连杆266可以连接到偏置设备(例如滑块)282,该偏置设备具有与第二钳口264联接的第一部段283和与第一钳口262联接或在其周围延伸的第二部段284。在一些实施例中,第二部段284可以包括用于第一钳口262的开口的护罩。当偏置设备282相对于第一钳口262移动时,第二部段284的内表面可与第一钳口262的外表面287接合,从而迫使第一钳口262闭合。在一些实施例中,第一钳口262还经由在偏压设备282的销槽272内滑动的第一钳口262的销271而在偏置设备282的第二部段284内移动或枢转。
35.如进一步所示,偏置设备282的第一部段283可以包括与第二钳口264的凸台290接合的凸缘288。偏置设备282可以沿着第二凸缘292进一步与第二钳口264接合。然而,这里的实施例并不限于此。
36.在一些实施例中,为了打开内窥镜吻合器头部260,第二活塞252可被朝向第二腔室250的近端275偏置,使得第二腔室250和第一腔室206的第一部分213内的压力降低。降低的压力反过来可使第一活塞头208朝向第一腔室206的近端276轴向地移动。当第一活塞头208朝向第一腔室206的近端276移动时,第一活塞杆210和机械连杆266也会移动,使得偏置设备282沿第一方向273移动。如果没有偏置设备282的第二部段284与第一钳口262的外表面287接合,第一钳口262可以自由地远离第二钳口264枢转,例如,响应弹簧力或杠杆机构。
37.在其他实施例中,第一活塞杆210和机械连杆266可以联接到第一钳口262。在使用期间,沿第一方向273拉动第一活塞杆210可以在偏置设备282的第一部段283内拉动第一钳口262,以将第一钳口262锁定在闭合位置。在一些实施例中,单独的活塞杆(未示出),可与偏置设备282联接,以在偏置设备282沿第二方向277(例如,远离手柄或用户接口)移动时,通过第一钳口262和第二钳口264钉合和切割组织。
38.为了闭合内窥镜吻合器头部260,如图4b中描述的那样,第一活塞杆210、机械连杆266和偏置设备282可以在第二方向277上被偏置。为了实现这一点,第二活塞252可被朝向第二腔室250的远端279偏置,使得第二腔室250和第一腔室206的第一部分213内的压力增加。增加的压力反过来可使得第一活塞头208朝向第一腔室206的远端280轴向地移动。当第一活塞头208朝向第一腔室206的远端280移动时,第一活塞杆210和机械连杆266也移动,使得偏置设备282在第二方向277上移动,从而使第一钳口262朝向第二钳口264枢转或旋转。
39.当内窥镜吻合器头部260关闭时,第一钳口262可将从钉仓268中的缝合钉孔驱动起来的缝合钉(未示出)变形为闭合形状。当内窥镜吻合器头部260处于闭合位置时,其横截面积以及第一活塞杆210可能适合于通过小的手术开口插入,诸如通过套管的插管。替代地,吻合器头部260可以经由附接到镜体的末端插入主体的开口,或通过镜体的工作通道插入。在一些实施例中,手柄/用户接口上的控制便于内窥镜吻合器头部260的正确放置和取向。
40.尽管内窥镜吻合器头部260被示为由致动器202进行偏置,但可以理解的是,内窥镜吻合器头部260可以联接到图2中所示以及本文描述的致动器102。例如,致动器102的活塞杆110可以联接到机械连杆266,该连杆用于控制第一钳口262。替代地,在图2a和2b中所示的以及本文描述的缝合设备131,可以由致动器202进行偏置。例如,第一活塞杆210可以联接到针穿引器126。本文的实施例在这方面不受限制。
41.转到图5,将描述根据本公开的实施例的另一种内窥镜吻合器头部360。如图所示,内窥镜吻合器头部360可包括与第二钳口364相对的第一钳口362,以及与活塞杆310联接的偏置设备382,该活塞杆310可与图4a和4b的第一活塞杆210和/或机械连杆266相同或相似,用于将吻合器头部360连接到致动器202。
42.偏置设备(例如,滑块)382可以具有与第一钳口362联接的第一部段383以及与第二钳口364联接的第二部段384。在一些实施例中,第一部段383可以包括与第一钳口362的突起部或凸台389接合的凸缘388。在使用期间,活塞杆310使偏置设备382在内窥镜吻合器头部360的远端357和近端358之间移动。当偏置设备382沿第一钳口362和第二钳口364横穿时,第二部段384的内表面可与第二钳口364的外表面387接合,以使第一钳口362和第二钳口364被带到一起。
43.转向图6,将描述根据本公开的实施例的另一种替代地内窥镜吻合器头部460。如图所示,内窥镜吻合器头部460可包括与第二钳口464相对的第一钳口462,以及与活塞杆410联接的偏置设备482,该活塞杆410可与图4a和4b的第一活塞杆210和/或机械连杆266相同或类似,用于将吻合器头部460连接到致动器202。
44.尽管在图6中示出与第一钳口462脱离,但偏置设备(例如滑块)482可以具有能与第一钳口462联接的第一部段483和与第二钳口464联接的第二部段484。在一些实施例中,第一部段483可以包括能操作以沿着第一钳口462的突起部或凸台489滑动的凸缘488。在使用期间,活塞杆410使偏置设备482在内窥镜吻合器头部460的远端457和近端458之间移动。当偏置设备482沿着第一钳口462和第二钳口464横穿时,第一钳口462和第二钳口464被带到一起,以钉合和切割组织。
45.在所示的非限制性实施例中,吻合器头部460可进一步包括联接在第一钳口462和第二活塞杆494之间的枢轴臂492。第二活塞杆494可由致动器偏置,诸如本文所述的致动器
102或致动器202。枢轴臂492可被固定以围绕枢轴点496旋转,其中第二活塞杆494朝向吻合器头部460的远端457移动使得第一钳口462打开,而第二活塞杆494朝向近端458的移动使得第一钳口462闭合。
46.图7是根据本公开的实施例的方法500的流程图。在框501,方法500可以包括将内窥镜医疗设备插入患者体内,该内窥镜医疗设备包括能操作以接合目标组织的内窥镜设备和联接到内窥镜设备的致动器,该致动器包括腔室内的活塞。在一些实施例中,活塞可包括与腔室的内表面接合的活塞头,以及与内窥镜设备的组织接合部件联接的活塞杆。在一些实施例中,该方法可包括在第二腔室内提供第二活塞,其中第二腔室与第一腔室流体地连接,并且其中活塞头的第一直径大于第二活塞的第二活塞头的第二直径。该方法可进一步包括致动第二活塞,以增加第二腔室和第一腔室中的流体的压力。
47.在框503,该方法可以包括控制腔室内的流体的量,以相对于目标组织致动活塞杆和组织接合部件。在一些实施例中,可以打开/关闭阀门以控制进入腔室的流体。在一些实施例中,致动器可包括与腔室流体地连接的入口导管和出口导管,其中,入口导管沿活塞头的第一侧定位,而出口导管沿活塞头的第二侧定位。
48.在框505,该方法500可以包括用组织接合部件接合目标组织以闭合目标组织的开口。在一些实施例中,该方法可以包括使用缝合设备接合目标组织,该缝合设备包括细长构件,以及在细长构件的一端处的缝合臂,其中组织接合部件是包含针的针穿引器。该方法可进一步包括在细长构件和缝合臂的远端之间运输针,以闭合目标组织的开口。在一些实施例中,该方法可包括使用吻合器头部接合目标组织,该吻合器头部包括与第二钳口相对的第一钳口,其中活塞杆与第一钳口联接。该方法可进一步包括致动活塞杆,以围绕目标组织闭合第一钳口和第二钳口,以闭合目标组织的开口。
49.可以理解的是,在形成本文所述的设备时可以使用各种不同的材料。在某些情况下,可以使用各种不同的金属。适合的金属的说明性但非限制性的示例包括钛、不锈钢、镁、钴铬和其他。在一些实施例中,例如,本文所述的设备可以包括任何合适的聚合材料,包括生物相容性材料,诸如聚氨酯或硅胶。其他合适的聚合物包括但不限于聚四氟乙烯(ptfe)、乙烯四氟乙烯(etfe)、氟化乙丙烯(fep)、聚甲醛(pom,例如,可向杜邦购买的delrin)、聚醚嵌段酯,聚氨酯(例如,聚氨酯85a)、聚丙烯(pp)、聚氯乙烯(pvc)、聚醚酯(例如,可向帝斯曼工程塑料(dsm engineering plastics)购买的arnitel)、基于醚或酯的共聚物(例如,丁烯/聚(亚烷基醚)邻苯二甲酸酯和/或其他聚酯弹性体,例如可向杜邦(dupont)购买的hytrel)、聚酰胺(例如,可向拜耳(bayer)购买的durethan或可从埃尔夫阿托化学(elf atochem)购买的cristamid)、弹性体聚酰胺、嵌段聚酰胺/醚,聚醚嵌段酰胺(peba,例如可以在pebax下的商品名获得)、乙烯醋酸乙烯酯共聚物(eva)、硅树脂、聚乙烯(pe)、马勒克斯高密度聚乙烯、马勒克斯低密度聚乙烯,线性低密度聚乙烯(例如rexell)、聚酯、聚对苯二甲酸丁二醇酯(pbt)、聚对苯二甲酸乙二醇酯(pet)、聚对苯二甲酸丙二醇酯、聚萘二甲酸乙二醇酯(pen)、聚醚醚酮(peek)、聚酰亚胺(pi)、聚醚酰亚胺(pei),聚苯硫醚(pps)、聚苯醚(ppo)、聚对苯二甲酰对苯二甲酰胺(例如,kevlar)、聚砜、尼龙、尼龙12(例如向ems美国格力纶公司(ems american grilon)购买的grilamid)、全氟丙基乙烯基醚(pfa)、乙烯乙烯醇、聚烯烃、聚苯乙烯、环氧树脂、聚偏二氯乙烯(pvdc)、聚(苯乙烯-b-异丁烯-b-苯乙烯)(例如,sibs和/或sibs 50a)、聚碳酸酯、离聚物、生物相容性聚合物、其他合
适的材料或它们的混合物、组合、共聚物、聚合物/金属复合材料等。
50.一些实施例可以使用“联接”和“连接”以及它们的衍生词来描述。这些术语并不旨在作为彼此的同义词。例如,一些实施例可使用术语“连接”和/或“联接”来描述,以表示两个以上的元件彼此之间有直接的物理接触或电接触。然而,术语“联接”也可以表示两个以上的元件不直接接触,但仍然相互合作或相互作用。
51.尽管是非限制性的,但如本文就本文的设备所使用的,术语“近端”可指最接近设备的手柄或用户接口的设备的一部分,或设备的部件的一部分。术语“远端”可以指离设备的手柄或用户接口最远的设备的一部分,或设备部件的一部分。
52.如本文所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文明确指出。将进一步理解,当在此使用术语“包含”、或“包括”时,表明所述特征、区域、步骤、元件和/或组件的存在,但不排除一个或多个其他特征、区域、整数、步骤、操作、元素、组件和/或其组的存在或添加。
53.此外,术语“基本”或“基本上地”以及术语“近似”或“大约”在一些实施例中可以互换使用,并且可以使用技术人员可以接受的任何相对测量来描述。例如,这些术语可以作为与参考参数的比较,以表明仍将提供预期功能的偏差。尽管是非限制性的,但与参考参数的偏差可以是,例如,小于1%,小于3%,小于5%,小于10%,小于15%,小于20%,等等的量。
54.尽管本文已经说明和描述了具体的实施例,但应该理解的是,为实现相同目的而计算的任何布置都可以替代所示的具体实施例。本公开旨在涵盖各种实施例的任何和所有改型或变化。应该理解的是,上述描述是以说明性的方式进行的,而不是限制性的。上述实施例的组合,以及本文未具体描述的其他实施例,对于本领域的技术人员来说,在回顾上述说明书后将是显而易见的。因此,各种实施例的范围包括使用上述组合物、结构和方法的任何其他应用。
55.更进一步,尽管上述说明性方法500被描述为一系列行为或事件,但除非特别说明,本公开内容不受此类行为或事件的说明性顺序的限制。例如,根据本公开内容,一些行为可以以不同的顺序和/或与除本文说明和/或描述的行为或事件之外的其他行为或事件同时发生。此外,并不是所有说明的行为或事件都需要根据本公开内容实施方法。
56.虽然主题事项是用结构特征和/或方法行为特有的语言描述的,但应当理解,所附权利要求中限定的主题事项不一定限于上述具体特征或行为。相反,上述具体特征和行为作为实现权利要求的示例性形式公开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。