1.本发明涉及使输入轴的旋转减速而输出的减速装置及搭载有减速装置的工业用机器人。
背景技术:
2.近年,在产品的生产线中大多使用在制造过程对产品进行加工、输送产品的工业用机器人。在工业用机器人的驱动关节搭载有电动机和减速装置,减速装置使电动机的旋转减速而使工业用机器人实现规定的动作。如上所述的减速装置为了抑制内部构造的烧熔、磨损而将润滑剂封入使用。但是,由于与减速装置的动作相伴而产生的热,减速装置内部的内压上升,为了抑制润滑剂向外部泄漏,润滑剂通常不将减速装置的内部充分地充满,以通过减速装置的驱动而流动的方式被封入。
3.在专利文献1中公开了一种减速装置,该减速装置通过使电动机等驱动源旋转而使输入轴旋转,受到输入轴的旋转的曲柄轴使外齿齿轮进行摆动旋转,由此使固定于外齿齿轮的第1载体及第2载体旋转,使与第2载体连接的输出轴旋转而输出。该减速装置具有对曲柄轴进行固定的支撑板,在支撑板具有将封入至减速装置内的润滑剂推起的推起部。公开了支撑板固定有曲柄轴,因此以与通过外齿齿轮的摆动旋转而发生的、曲柄轴相对于将外齿齿轮的外周覆盖的圆柱状的部件即内齿齿轮的轴心的公转相同的速度及方向使支撑板旋转,由此使润滑剂流动。
4.专利文献1:日本特开2017-106606号公报
技术实现要素:
5.但是,在将上述专利文献1所公开的减速装置装入至工业用机器人的情况下,封入至减速装置内的润滑剂不充分地流动,有可能发生减速装置的内部构造(例如,曲柄轴、第1载体、外齿齿轮及第2载体等)的烧熔、磨损。
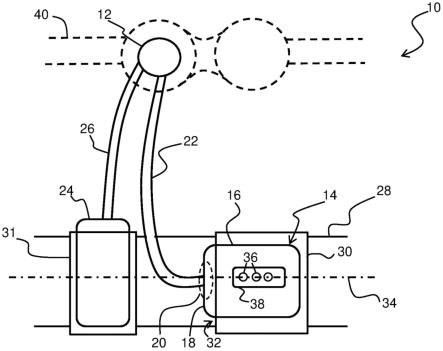
6.图5及图6是对搭载有减速装置的工业用机器人的动作的一个例子进行说明的概略图。使用图5及图6,对将专利文献1所公开的减速装置搭载于工业用机器人的情况下的减速装置的动作的一个例子进行说明。在图5及图6中,具有第1臂a1、第2臂a2、第2臂前端at,以通过第2臂前端at进行作业的工业用机器人的一个例子即多关节机器人为例进行说明。
7.在本例示中,将图5所示的状态设为工业用机器人工作前的减速装置ga的固定位置,将图6所示的状态设为工业用机器人为了通过第2臂前端at进行作业而动作后的减速装置ga的动作后位置。如图5所示,减速装置ga搭载于使工业用机器人的各臂驱动的位置即第1驱动关节j1及第2驱动关节j2,减速装置ga的内部的曲柄轴23a与搭载于第1驱动关节j1及第2驱动关节j2的各减速装置ga一起位于图5所示的上下方向的上侧。
8.在工业用机器人动作后,如图6所示,搭载于第1驱动关节j1的减速装置ga进行将第1臂a1朝向图6所示的上下方向下侧放倒的动作,因此搭载于第1驱动关节j1的减速装置ga的曲柄轴23a向图6所示的逆时针方向le侧进行大约90度公转,支撑板70的推起部77a使
润滑剂与曲柄轴的公转量相应地流动,但相对于减速装置ga的内部无法实现充分的流动。
9.另外,搭载于第2驱动关节j2的减速装置ga进行将第2臂a2朝向图6所示的上下方向上侧抬起的动作,因此搭载于第2驱动关节j2的减速装置ga的曲柄轴23a向图6所示的顺时针方向ri侧进行大约90℃公转,但与第1臂a1的动作相伴,减速装置ga自身的相位向逆时针方向le侧进行了大约90度旋转,因此搭载于第2驱动关节j2的减速装置ga的曲柄轴23a成为与图5所示的固定位置相同的位置。即,搭载于第2驱动关节j2的减速装置ga所具有的支撑板70的推起部77a无法使润滑剂流动。
10.工业用机器人重复图5及图6的动作,因此在上述专利文献1所示的减速装置的结构中,封入至减速装置内的润滑剂没有充分地流动,有可能发生减速装置的内部构造的烧熔、磨损。
11.本发明就是为了解决上述问题而提出的,其目的在于,提供减速机及搭载有减速机的工业用机器人,该减速机使润滑剂在减速装置的内部充分地流动,抑制了减速装置的内部构造的烧熔、磨损。
12.本发明所涉及的减速装置具有:外轮廓,其内周为圆环形状,在内周具有内齿;输入轴,其经过与沿外轮廓的内周的假想圆面垂直的轴心,且沿轴心配置,在外周具有输入外齿;外齿齿轮,其配置于外轮廓内,在外周具有与内齿啮合的外齿;多个曲柄轴,其插入贯穿于在外齿齿轮形成的贯通孔,按照沿外轮廓的内周的周向而绕轴心配置,通过旋转而使外齿齿轮偏心地旋转;多个传递齿轮,其在外周具有与输入外齿啮合的传递外齿,配置于多个曲柄轴的一端,伴随输入轴的旋转而旋转,使多个曲柄轴旋转;以及环形状的循环带,其遍及多个传递齿轮而配置,伴随传递齿轮的旋转而绕多个传递齿轮进行旋转,使润滑剂流动。
13.发明的效果
14.根据本发明,遍及多个传递齿轮而配置有循环带,因此循环带与曲柄轴的公转无关系地绕多个传递齿轮旋转。因此,封入至减速装置内的润滑剂充分地流动,能够抑制减速装置的内部构造的烧熔、磨损的发生。
附图说明
15.图1是表示本发明的实施方式1所涉及的减速装置的概略的一个例子的剖视图。
16.图2是用于表示本发明的实施方式1所涉及的外轮廓的一个例子的沿图1中的i-i线的外轮廓剖视图。
17.图3是用于表示本发明的实施方式1所涉及的减速装置的一个例子的从图1中的x轴方向观察的俯视图。
18.图4是用于表示本发明的实施方式1所涉及的减速装置的一个例子的沿图1中的i-i线的减速装置剖视图。
19.图5是对搭载有减速装置的工业用机器人的动作的一个例子进行说明的概略图。
20.图6是对搭载有减速装置的工业用机器人的动作的一个例子进行说明的概略图。
具体实施方式
21.实施方式1.
22.使用附图对本发明的实施方式1中的减速装置及搭载有减速装置的工业用机器人
进行说明。图1是表示本实施方式1所涉及的减速装置g的概略的一个例子的剖视图。图2是表示从图1所示的x轴方向观察的外轮廓1的一个例子的俯视图。图3是表示从图1所示的x轴方向观察的减速装置g的一个例子的俯视图。图4是表示沿图1所示的i-i线的减速装置g的一个例子的剖视图。
23.本实施方式1所涉及的减速装置g如图1所示,具有:外轮廓1,其在内周具有内齿11;输入轴2,其在外周具有输入外齿21;多个外齿齿轮3(在实施方式1中为2片),其具有与外轮廓1的内齿11啮合的外齿31;第1载体8及第2载体9,其隔着多个外齿齿轮3而相对;多个曲柄轴4a~4c(在本实施方式1中为3根),其插入贯穿于在外齿齿轮3形成的贯通孔32a~32c;多个传递齿轮5a~5c(在本实施方式1中为3片),其具有传递外齿51,配置于曲柄轴4a~4c各自的一端;以及循环带6,其遍及多个传递齿轮5a~5c而配置。
24.外轮廓1的内周为圆环形状,如图1及图2所示,经过沿内周的假想圆面vc的中心,将与假想圆面vc垂直的轴设为轴心cl的圆筒状的部件。另外,外轮廓沿内周具有内齿11。在外轮廓1的内部配置有多个外齿齿轮3。外轮廓1的外周为圆环形状,沿外周具有多个用于将减速装置g搭载于工业用机器人的安装孔。
25.外齿齿轮3如图1及图4所示,在外周具有外齿31,以外轮廓1的内齿11和外齿31啮合的方式配置于外轮廓1内。而且,在外轮廓1内配置的外齿齿轮3在由后面记述的第1载体8和第2载体9夹着的状态保持于外轮廓1内。在本实施方式1中,在内齿11和外齿31之间配置有传递销7,内齿11和外齿31成为经由传递销7进行啮合的方式。即,内齿11和外齿31进行啮合只要是来自外齿31的力能够传递至内齿11的状态即可,可以如本实施方式1所示经由传递销7那样的其他部件进行啮合,也可以是内齿11和外齿31直接卡合而啮合。
26.在此基础上,在外齿齿轮3具有供后面记述的曲柄轴4a~4c插入贯穿的3个贯通孔32a~32c和供后面记述的输入轴2插入贯穿的第1中央贯通孔33。第1中央贯通孔33在外齿齿轮3配置于外轮廓1的内部的状态下,以经过外轮廓1的轴心cl的方式设置。供曲柄轴4a~4c插入贯穿的贯通孔32a~32c按照沿外轮廓1的内周的周向设置,配置于外轮廓1的轴心cl的周围。换言之,曲柄轴4a~4c配置为将第1中央贯通孔33包围。
27.并且,在外齿齿轮3具有供后面记述的第1载体8所具有的连结轴81a~81c插入贯穿的3个连结用贯通孔34a~34c。连结用贯通孔34a~34c从供曲柄轴4a~4c插入贯穿的贯通孔32a~32c所配置的位置偏移,按照沿外轮廓1的内周的周向设置,配置于外轮廓1的轴心cl的周围。换言之,连结用贯通孔34a~34c配置为在与贯通孔32a~32c不同的位置将第1中央贯通孔33包围。
28.曲柄轴4a~4c如图1所示,具有轴部41和偏心部42a、42b。2个偏心部42a、42b具有相对于曲柄轴4a~4c的轴部的轴心40c而偏心的外周,偏心部42a和偏心部42b的偏心相位在本实施方式1中为180度(向彼此背离的方向偏心)。
29.曲柄轴4a~4c如图1及图4所示,分别向外齿齿轮3的贯通孔32a~32c各自插入贯穿1根,偏心部42a、42b配置为位于外齿齿轮3的贯通孔32a~32c内。曲柄轴4a~4c在相同方向旋转,由此在各个曲柄轴4a~4c设置的偏心部42a、42b使外齿齿轮3相对于外轮廓1的轴心cl而偏心地旋转。
30.第1载体8如图1所示,具有供后面记述的输入轴2插入贯穿的第2中央贯通孔82和供外齿齿轮3的连结用贯通孔34a~34c插入贯穿的连结轴81a~81c。在连结轴81a~81c具
有第1载体固定孔83,该第1载体固定孔83用于使后面记述的第2载体9和第1载体8连结而进行固定。另外,第1载体8具有:第1曲柄轴保持用贯通孔84a~84c,其供曲柄轴4a~4c的轴部41的一端插入贯穿,将曲柄轴4a~4c可自由旋转地保持;以及输出轴固定孔85,其用于对在与具有连结轴81a~81c的一侧相反侧配置的输出轴(未图示)进行固定。输出轴配置于第1载体8的与具有连结轴81a~81c的一侧的相反侧,将设置于输出轴的固定孔插入贯穿,通过由输出轴固定孔85固定的固定部件(螺栓等)而固定于第1载体8。
31.第2载体9如图1所示,具有:第3中央贯通孔92,其供后面记述的输入轴2插入贯穿;以及第2载体固定孔93,其用于与第1载体8连结而进行固定。另外,具有第2曲柄轴保持用贯通孔94a~94c,其供曲柄轴4a~4c的轴部41中的与保持于第1载体8的一侧相反侧的一端插入贯穿,可自由旋转地保持曲柄轴4a~4c。
32.第1载体8和第2载体9以隔着在外轮廓1的内部配置的多个外齿齿轮3而相对的方式配置。而且,在第1载体8的第1曲柄轴保持用贯通孔84a~84c各自供曲柄轴4a~4c各自的轴部41中的第1载体8侧的一端插入贯穿而进行保持,在第2载体9的第2曲柄轴保持用贯通孔94a~94c供曲柄轴4a~4c各自的轴部41中的第2载体9侧的一端插入贯穿而进行保持。此外,曲柄轴4a~4c各自的轴部41中的第2载体侧的一端从第2载体9凸出而被保持。在此基础上,第1载体8的连结轴81a~81c分别插入贯穿于外齿齿轮3的连结用贯通孔34a~34c,经由设置于连结轴81a~81c的第1载体固定孔和设置于第2载体9的第2载体固定孔93而通过固定部件(例如螺栓)将第1载体8和第2载体9隔着多个外齿齿轮3进行固定。
33.在外轮廓1和第1载体8之间及外轮廓1和第2载体9之间分别配置有多个轴承100,与外齿齿轮3的偏心旋转相伴而旋转的第1载体8及第2载体9能够相对于外轮廓1平滑地旋转。
34.输入轴2如图1及图3所示是经过外轮廓1的轴心cl,沿轴心cl配置的棒形状的部件。具体地说,插入贯穿于第1及第2载体8、9所具有的第2及第3中央贯通孔82、92和2片外齿齿轮3的第1中央贯通孔33,可自由旋转地由第1及第2载体8、9保持。另外,第2载体9侧的一端配置为从第2载体9凸出,在从输入轴2的第2载体9凸出的一端即凸出部的外周具有与后面记述的传递齿轮5a~5c的传递外齿51啮合的输入外齿21。输入轴2与驱动源(未图示)即例如电动机连接,伴随电动机的旋转而进行旋转。
35.传递齿轮5a~5c如图1及图3所示,在外周具有传递外齿51,在传递齿轮5a~5c的中央具有供曲柄轴4a~4c的轴部41的一端插入贯穿的传递齿轮贯通孔52。传递齿轮5a~5c各自的曲柄轴4a~4c中的从第2载体9凸出的轴部41的一端插入贯穿于传递齿轮贯通孔52,配置于曲柄轴4a~4c的一端。传递齿轮5a~5c的传递外齿51与在输入轴2的外周设置的输入外齿21啮合,由此受到通过驱动源进行旋转的输入轴2的旋转而使曲柄轴4a~4c旋转。
36.循环带6如图1及图3所示,是遍及3个传递齿轮5a~5c而配置的环状的部件。循环带6具有:内周凸起61,其在内周与传递齿轮5a~5c的传递外齿51啮合;以及外周凸起62,其设置于循环带6的外周。循环带6通过遍及传递齿轮5a~5c而配置,从而与传递齿轮5a~5c受到输入轴2的旋转而旋转相伴地,绕3个传递齿轮5a~5c进行旋转(绕转)。循环带6优选耐温度性、耐磨性优异,例如适合使用由丁腈橡胶、丙烯酸橡胶、氟橡胶、硅橡胶等形成的带、由金属形成的带或链条等。
37.下面,对本实施方式1所涉及的减速装置g使驱动源的旋转减速时的动作及循环带
的动作进行说明。
38.减速装置g使对输入轴2输入的来自驱动源的旋转减速。首先,如果输入轴2通过驱动源而旋转(自转),则与输入轴2的输入外齿21啮合的传递齿轮5a~5c旋转(自转)。接下来,伴随传递齿轮5a~5c的旋转,在传递齿轮5a~5c各自固定的曲柄轴4a~4c进行旋转(自转)。曲柄轴4a~4c旋转,由此曲柄轴4a~4c的偏心部42a、42b使外齿齿轮3相对于外轮廓1的轴心cl而偏心地旋转。
39.更详细地说,输入轴2的旋转以与驱动源的旋转相同的速度进行旋转。传递齿轮5a~5c受到该输入轴2的旋转而使曲柄轴4a~4c旋转。在这里,受到曲柄轴4a~4c的旋转的外齿齿轮3相对于外轮廓1的轴心cl而偏心地旋转,因此外齿齿轮3的旋转与驱动源的旋转相伴是延迟的旋转,能够将驱动源的旋转减速。例如,在外齿齿轮3的外周所具有的外齿31的数量为360个的情况下,如果曲柄轴4a~4c旋转1周(旋转角为360度),则外齿齿轮3根据外齿31的数量以1个的对应量(旋转角为1度)进行旋转。即,如果是如上所述的情况,则曲柄轴4a~4c旋转360度,由此外齿齿轮3旋转1周。还依赖于外齿齿轮3的外齿31的数量、外齿齿轮3的片数,但外齿齿轮3的旋转与传递齿轮5a~5c的旋转相比变迟。
40.而且,外齿齿轮3偏心地旋转,由此对插入贯穿于外齿齿轮3的连结用贯通孔34a~34c的第1载体8的连结轴81a~81c施力,第1载体8以外轮廓1的轴心cl为轴进行旋转。在第1载体8旋转时,与第1载体一起被固定的第2载体9也同样地旋转。而且,关于由第1载体8及第2载体9可自由旋转地保持的曲柄轴4a~4c,也与第1载体8及第2载体9的旋转相匹配地绕外轮廓1的轴心cl进行公转。即,伴随输入轴2的旋转,在外轮廓1的内部配置的外齿齿轮3偏心地旋转,由此能够将输入至输入轴2的旋转减速而输出至与第1载体8连接的输出轴。
41.在这里,遍及3个传递齿轮5a~5c将传递齿轮5a~5c包围而配置的循环带6与内周凸起61和传递齿轮5a~5c的传递外齿51啮合,因此伴随传递齿轮5a~5c的旋转,绕传递齿轮5a~5c进行绕转。即,比与外齿齿轮3的旋转相匹配地旋转的第2载体9的旋转更快(更多)地绕转。
42.即,即使向图5及图6所示的工业用机器人装入本实施方式1的减速装置g,在从图5的固定位置变为图6的动作后位置的情况下,搭载于第1驱动关节j1的减速装置g也直至曲柄轴4a~4c向逆时针方向le侧公转90度为止使传递齿轮5a~5c进行90旋转,循环带6绕传递齿轮5a~5c向逆时针方向le侧绕转多次。另外,搭载于第2驱动关节j2的减速装置g如图6所示那样在曲柄轴4a~4c的位置成为与图5所示的固定位置相同的位置的情况下,也直至曲柄轴4a~4c向逆时针方向le侧公转90度为止使传递齿轮5a~5c进行90旋转,循环带6绕传递齿轮5a~5c向逆时针方向le侧绕转多次。
43.因此,减速装置g遍及传递齿轮5a~5c而配置有循环带6,由此能够比曲柄轴4a~4c的公转更快(更多)地绕转,能够使封入至减速装置g的润滑剂充分地流动,能够抑制减速装置g的内部构造(例如,曲柄轴4a~4c、第1载体8、外齿齿轮3及第2载体9等)的烧熔、磨损。
44.并且,本实施方式1所涉及的减速装置g所具有的循环带6具有内周凸起61及外周凸起62,因此能够将润滑剂上提,能够更有效地抑制减速装置g的内部构造的烧熔、磨损。
45.以上的实施方式所示的结构表示本发明的内容的一个例子,也可以与其他公知技术组合,也可以在不脱离本发明的主旨的范围将结构的一部分省略、变更。
46.在上述实施方式1中,在循环带6的内周具有内周凸起61和在外周具有外周凸起
62,但也可以是不具有这些部件的方式。在不具有内周凸起61的情况下,也能够通过循环带6和传递齿轮5a~5c之间的摩擦使循环带6绕转。如果循环带6绕转,则即使不具有内周凸起61及外周凸起62,通过将循环带6浸润于润滑剂,从而也能够使润滑剂充分地流动。另外,为了增大循环带6和传递齿轮5a~5c的摩擦,可以将循环带6的内周设为比外周弹性力小的(柔软的)材质。
47.另外,循环带6也可以是具有内周凸起61或外周凸起62中的任一者的方式。在如上所述的情况下,也能够使润滑剂充分地流动。
48.并且,循环带6所具有的外周凸起62能够设为任意的形状,但为了特别有效地进行润滑剂的流动,例如可以是外周凸起62中的与传递齿轮5a~5c侧相反侧的前端弯折的形状(l字形状、t字形状、f字形状等)。
49.在上述实施方式1中,在外轮廓1的内周具有的内齿11和在外齿齿轮3的外周具有的外齿31经由传递销7而啮合,但也可以是不配置传递销7,而是外轮廓1的内齿11和外齿齿轮3的外齿31直接啮合的方式。
50.在上述实施方式1中,使用2片外齿齿轮3,但也可以设为1片,也可以设为使用大于或等于2片的多片。另外,使用了3根曲柄轴4a~4c,但只要曲柄轴使用多根即可,只要使用大于或等于2根即可。另外,在曲柄轴的一端配置的传递齿轮只要使用与曲柄轴的数量相匹配的片数即可。
51.在上述实施方式1中,作为对减速装置g进行组装的工业用机器人,例示出多关节机器人,但也可以在其他工业用机器人组装减速装置g。例如可以在使多连杆机器人的臂驱动的位置组装减速装置g。
52.标号的说明
53.1外轮廓,11内齿,vc假想圆面,cl轴心,2输入轴,21输入外齿,3外齿齿轮,31外齿,32a~32c贯通孔,33第1中央贯通孔,34a~34c连结用贯通孔,4a~4c曲柄轴,40c轴部的轴心,41轴部,42a 42b偏心部,5a~5c传递齿轮,51传递外齿,52传递齿轮贯通孔,6循环带,61内周凸起,62外周凸起,7传递销,8第1载体,81a~81c连结轴,82第2中央贯通孔,83第1载体固定孔,84a~84c第1曲柄轴保持用贯通孔,85输出轴固定孔,9第2载体,92第3中央贯通孔,93第2载体固定孔,94a~94c第2曲柄轴保持用贯通孔。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。