技术特征:
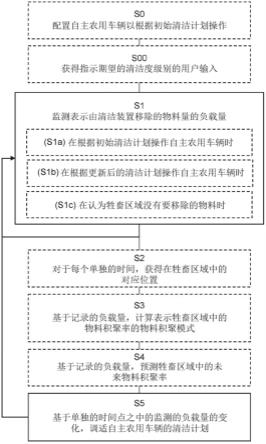
1.一种用于根据清洁计划操作自主农用车辆(1)的方法,其中所述自主农用车辆(1)包括适合于移动来自牲畜区域(30)/牲畜区域(30)中的粪肥的清洁装置(13),所述方法包括:-在根据所述清洁计划操作所述自主农用车辆(1)时,在多个单独的时间监测(s1)表示由所述清洁装置(13)移动的物料量的负载量,以及-基于所述单独的时间之中监测的负载量的变化,调整(s5)所述自主农用车辆(1)的所述清洁计划。2.根据权利要求1所述的方法,其中所述清洁计划定义所述自主农用车辆(1)的清洁时间表和/或一条或多条清洁路线(31)。3.根据前述权利要求中任一项所述的方法,其中所述调整(s5)包括调整所述清洁计划,使得所述监测的负载量的所述变化减小。4.根据前述权利要求中任一项所述的方法,其中所述调整(s5)包括调整所述清洁计划,使得所述监测的负载量保持低于预定义负载阈值。5.根据前述权利要求中任一项所述的方法,其中所述变化表示在某一时间段内的变化,并且其中所述清洁计划的所述调整(s5)包括基于在一个或多个先前某些时间段内的变化,针对所述某一时间段,调整所述自主农用车辆(1)的清洁时间表。6.根据权利要求5所述的方法,其中所述时间段为工作日、一天或24小时。7.根据权利要求5或6所述的方法,其中所述清洁计划的所述调整包括调整所述自主农用车辆(1)的清洁时间表,使得在一个清洁周期期间,在对应于第一平均监测负载的时间间隔期间比在对应于第二平均监测负载的时间间隔期间更频繁地执行清洁,其中所述第一平均监测负载高于所述第二平均监测负载。8.根据前述权利要求中任一项所述的方法,其包括:-对于每个单独的时间,获得(s3)所述牲畜区域中的对应位置,并且其中所述变化表示所述牲畜区域中不同位置之中的所述负载量的变化,并且其中所述清洁计划的所述调整(s5)包括基于所述牲畜区域中不同位置之中的所述负载量的所述变化,调整所述自主农用车辆(1)的清洁时间表。9.根据权利要求8所述的方法,其中所述清洁计划的所述调整包括调整所述自主农用车辆(1)的清洁路线,使得在对应于第一平均监测负载的区域中比在对应于第二平均监测负载的区域中更频繁地执行清洁,其中所述第一平均监测负载高于所述第二平均监测负载。10.根据前述权利要求中任一项所述的方法,其包括:-基于所述监测的负载量,计算(s4)表示所述牲畜区域(30)中的物料积聚率的物料积聚模式,并且其中所述调整(s5)包括基于计算的物料积聚模式,调整所述清洁计划。11.根据权利要求10所述的方法,其中所述物料积聚模式描述物料积聚随时间的变化。12.根据权利要求10或11所述的方法,其中所述物料积聚模式包括负载积聚地图,所述负载积聚地图描述所述牲畜区域中不同位置之中的物料积聚的变化。13.根据前述权利要求中任一项所述的方法,其包括在认为所述牲畜区域没有要移除的物料时,在所述牲畜区域中操作所述自主农用车辆(1)时,监测(s1)所述负载量,并且基于表示没有物料的牲畜区域的所述监测的负载量,校准所述监测(s1)。
14.根据前述权利要求中任一项所述的方法,其包括:-基于所述监测的负载量,估计所述牲畜区域中的历史物料积聚率,以及-基于所述历史物料积聚率,预测(s5)所述牲畜区域中的未来物料积聚率,其中所述调整(s5)包括基于所述牲畜区域中预测的未来物料积聚率,调整所述清洁计划。15.根据前述权利要求中任一项所述的方法,其中所述方法包括:-获得(s0)指示期望的清洁度级别的用户输入,并且其中所述调整包括基于获得的清洁度级别,调整所述清洁计划。16.根据前述权利要求中任一项所述的方法,其中所述负载量指示在某一时间段期间移动所积聚的物料所需的能量的量。17.根据前述权利要求中任一项所述的方法,其中所述负载量包括以下中的至少一项:功率量、压力量、重量的量和流量的量。18.一种用于操作自主农用车辆(1)的控制布置,所述自主农用车辆(1)被配置成根据清洁计划清洁牲畜区域,其中所述控制布置被配置成:-在根据所述清洁计划操作所述自主农用车辆(1)时,在多个单独的时间监测表示由清洁装置(13)移动的物料量的负载量,以及-基于在所述多个单独的时间之中监测的负载量之中的所述监测的负载量的变化,调整所述自主农用车辆(1)的清洁计划。19.根据权利要求18所述的控制布置(10),其被配置成执行根据权利要求2至17中任一项所述的方法。20.一种自主农用车辆(1),其被配置成根据清洁计划清洁牲畜区域,所述自主农用车辆(1)包括:-马达(11),其被配置成推进所述自主农用车辆(1),-储能装置(12),其被配置成为所述马达(11)供应能量,-清洁装置(13),其被配置成从所述牲畜区域移动污垢,-负载传感器(14),其被配置成获得指示由所述清洁装置(13)移动的物料量的负载量,-根据权利要求18或19所述的控制布置。21.一种计算机程序产品,其包括指令,所述指令在计算机执行所述程序时使所述计算机执行根据权利要求2至17中任一项所述的方法。
技术总结
本公开总体上涉及畜舍清洁,并且具体地说,本公开涉及一种自主农用车辆,其包括适合于移除粪肥牲畜区域的清洁装置。根据第一方面,本公开提出了一种用于根据清洁计划操作自主农用车辆的方法。所述方法包括在根据所述清洁计划操作所述自主农用车辆时,在多个单独的时间监测S1表示由所述清洁装置移动的物料量的负载量,以及基于在所述单独的时间之中监测的负载量的变化,调整S5所述自主农用车辆的所述清洁计划。本公开还涉及一种用于操作所述自主农用车辆的方法以及一种用于执行所述方法的计算机程序。的计算机程序。的计算机程序。
技术研发人员:M.布林克 B.雅克利克 B.斯卢萨奇克
受保护的技术使用者:利拉伐控股有限公司
技术研发日:2020.11.24
技术公布日:2022/7/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。