技术特征:
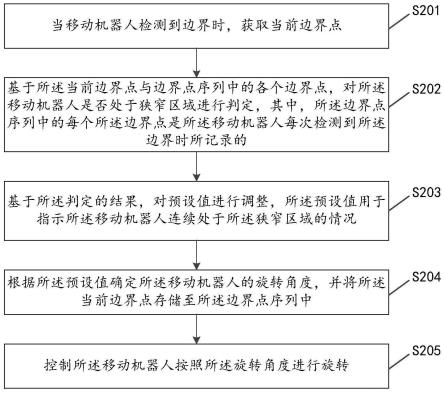
1.一种移动机器人控制方法,其特征在于,所述方法包括:当移动机器人检测到边界时,获取当前边界点;基于所述当前边界点与边界点序列中的各个边界点,对所述移动机器人是否处于狭窄区域进行判定,其中,所述边界点序列中的每个所述边界点是所述移动机器人每次检测到所述边界时所记录的;基于所述判定的结果,对预设值进行调整,所述预设值用于指示所述移动机器人连续处于所述狭窄区域的情况;根据所述预设值确定所述移动机器人的旋转角度,并将所述当前边界点存储至所述边界点序列中;控制所述移动机器人按照所述旋转角度进行旋转。2.根据权利要求1所述的方法,其特征在于,在所述基于所述当前边界点与边界点序列中的各个边界点,对所述移动机器人是否处于狭窄区域进行判定之前,还包括:判断所述边界点序列中的边界点个数是否大于或等于预设边界点数;若所述边界点个数大于或等于所述预设边界点数,则执行所述基于所述当前边界点与边界点序列中的各个边界点,对所述移动机器人是否处于狭窄区域进行判定的步骤。3.根据权利要求1或2所述的方法,其特征在于,所述基于所述当前边界点与边界点序列中的各个边界点,对所述移动机器人是否处于狭窄区域进行判定,包括:从所述边界点序列中获取所述当前边界点的前预设个数连续的边界点;基于所述预设个数连续的边界点与所述当前边界点,对移动机器人是否处于狭窄区域进行判定。4.根据权利要求3所述的方法,其特征在于,所述从所述边界点序列中获取所述当前边界点的前预设个数连续的边界点,包括:从所述边界点序列中获取第一边界点和第二边界点,其中,所述第一边界点为上上次检测到所述边界时所记录的边界点,所述第二边界点为上一次检测到所述边界时所记录的边界点;相应的,所述基于所述预设个数连续的边界点与所述当前边界点,对移动机器人是否处于狭窄区域进行判定,包括:以所述当前边界点、所述第一边界点和所述第二边界点为顶点,确定一个三角形结构;基于所述三角形结构,对所述移动机器人是否处于所述狭窄区域进行判定。5.根据权利要求4所述的方法,其特征在于,所述基于所述三角形结构,对所述移动机器人是否处于所述狭窄区域进行判定,包括:在所述三角形结构中,分别计算所述第二边界点与所述当前边界点和所述第一边界点之间的距离,得到第一距离和第二距离;基于所述第一距离和所述第二距离,对所述移动机器人是否处于所述狭窄区域进行判定;优选的,所述基于所述第一距离和所述第二距离,对所述移动机器人是否处于所述狭窄区域进行判定,包括:判断所述第一距离和所述第二距离是否均小于或等于第一预设阈值;若所述第一距离大于所述第一预设阈值,或者,所述第二距离大于所述第一预设阈值,
则判定所述移动机器人未处于所述狭窄区域;优选的,所述方法还包括:若所述第一距离和所述第二距离均小于或等于所述第一预设阈值,则将所述当前边界点和所述第一边界点之间连线所形成的边,确定为参考边;计算所述第二边界点到所述参考边的垂直距离;判断所述垂直距离是否小于第二预设阈值;若所述垂直距离小于所述第二预设阈值,则判定所述移动机器人处于所述狭窄区域;若所述垂直距离大于或等于所述第二预设阈值,则判定所述移动机器人未处于所述狭窄区域。6.根据权利要求1或2所述的方法,其特征在于,若所述预设值为预设计数器的值,则所述基于所述判定的结果,对预设值进行调整,包括:若所述判定的结果表征所述移动机器人处于所述狭窄区域,则将所述预设计数器的值加第一预设数值;若所述判定的结果表征所述移动机器人未处于所述狭窄区域,则将所述预设计数器的值设置为预设初始值;若所述预设值为预设计时器的值,则所述基于所述判定的结果,对预设值进行调整,包括:若所述判定的结果表征所述移动机器人未处于所述狭窄区域,则将所述预设计时器的值进行重置。7.根据权利要求1或2所述的方法,其特征在于,所述根据所述预设值确定所述移动机器人的旋转角度,包括:将预设范围集中与所述预设值匹配的预设范围,确定为目标范围;其中,所述预设范围集中各个所述预设范围与所述预设值成反比关系;在所述目标范围内随机选取一个角度,作为所述移动机器人的旋转角度。8.一种移动机器人控制装置,其特征在于,所述装置包括:边界点获取模块,用于当移动机器人检测到边界时,获取当前边界点;狭窄区域判定模块,用于基于所述当前边界点与边界点序列中的各个边界点,对所述移动机器人是否处于狭窄区域进行判定,其中,所述边界点序列中的每个所述边界点是所述移动机器人每次检测到所述边界时所记录的;预设值调整模块,用于基于所述判定的结果,对预设值进行调整,所述预设值用于指示所述移动机器人连续处于所述狭窄区域的情况;角度确定模块,用于根据所述预设值确定所述移动机器人的旋转角度,并将所述当前边界点存储至所述边界点序列中;控制模块,用于控制所述移动机器人按照所述旋转角度进行旋转。9.一种控制设备,其特征在于,包括处理器和存储器,所述存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由所述处理器加载并执行以实现如权利要求1-7任一所述的移动机器人控制方法。10.一种计算机存储介质,其特征在于,所述计算机存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现如权利
要求1-7任一所述的移动机器人控制方法。
技术总结
本发明公开了一种移动机器人控制方法、装置、设备及存储介质,属于移动机器人技术领域,该方法包括:当移动机器人检测到边界时,获取当前边界点;基于当前边界点与边界点序列中的各个边界点,对移动机器人是否处于狭窄区域进行判定,其中,边界点序列中的每个边界点是移动机器人每次检测到边界时所记录的;基于判定的结果,对预设值进行调整,该预设值用于指示移动机器人连续处于狭窄区域的情况;根据预设值确定移动机器人的旋转角度,并将当前边界点存储至边界点序列中;控制移动机器人按照该旋转角度进行旋转。本发明能够使移动机器人快速通过狭窄区域,减少时间和资源的浪费,提高移动机器人的工作效率。动机器人的工作效率。动机器人的工作效率。
技术研发人员:张东旭 张波
受保护的技术使用者:苏州金莱克精密机械有限公司
技术研发日:2020.12.22
技术公布日:2022/7/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。