1.本发明有关一种影像采集装置及影像采集方法,尤指可准确校正影像歪斜且便于携行操作的一种影像采集装置及影像采集方法。
背景技术:
2.对于充满电子产品的时代里,人们对于生活纪录、商业以及医学等内容的影像的需求与要求逐渐增加,而大众记录影像的型态也从早期的传统底片,渐渐地改为以数码档案作为纪录形式。尤其对于商业或医学领域经常使用的平面影像而言,其对于影像的精确性要求较为严苛,很容易因为采集到的影像的精确性不够高,而产生严重的辨识与判断结果,进而导致生命安全或财产的损失。为此,针对影像的校正成为一个重要的议题。
3.在现有技术中,为了要采集到较为正确的影像,通常会采用固定式结构的影像扫描装置,以避免使用者不会调整最佳置物距离等等状况。因为前述影像扫描装置一并采用已调整完成的固定距离的置物平台,故可以完全发挥所有像素构成的最大解析度。然而,这种采用固定置物距离的固定式的扫描装置通常具有庞大的体积,且重量相当,例如扫描机、传真机、多功能事务机或其他台式扫瞄器等。又或,若考虑采用非固定式的方式采集待测物的影像,例如以手持或支撑物架设数位相机。由于一般使用者在操作时,没有办法同时校正放置待测物的水平位置以及数位相机的水平位置,因此容易会采集到歪斜影像,且需要对已采集到的歪斜影像进行边缘校正处理,例如梯形修正(keystone adjustment),以使得整个影像趋近于真实。
4.然而,现有技术针对歪斜影像的采集以及校正的程序,是必须先找寻并标记歪斜影像的边界(通常会是对比度差异较大的部分)。继而,使用特定应用程式将整个歪斜影像进行二维方向的延展或压缩。但是在对歪斜影像进行二维方向的延展或压缩过程中,有很大的可能性会造成细部纹理的偏移,导致多个纹理之间的比例关系不正确(例如脸歪嘴斜),反而使得校正后的歪斜影像更失真。且进一步而言,一般使用者在每次采集影像的时候,亦难以控制待测物以及数位相机之间的距离,导致无法发挥所有像素构成的最大解析度。
5.为此,如何设计出一种影像采集装置以及影像采集方法,特别是解决现有技术的不便携行、校正后的歪斜影像更失真以及无法发挥所有像素构成的最大解析度的技术问题,乃为本案发明人所研究的重要课题。
技术实现要素:
6.本发明的一目的在于提供一种影像采集装置,可以避免现有技术的不便携行、校正后的歪斜影像更失真以及无法发挥所有像素构成的最大解析度的技术问题,达到方便携行、准确度高以及解析度高的目的。
7.为了达到前述目的,本发明所提出的影像采集装置应用于待测物,且影像采集装置包括:至少一个发光单元、影像感测器以及处理单元。其中,至少一个发光单元的每一个
对待测物输出至少一个参考光束。影像感测器接收反射自待测物的至少一个参考光束,且依据待测物产生多个像素资料。处理单元耦接至少一个发光单元以及影像感测器,处理单元依据影像感测器接收的至少一个参考光束,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像。
8.进一步而言,所述的影像采集装置中,影像感测器包括多个像素单元,且多个像素单元产生多个像素资料。其中,多个像素单元的至少一者接收到至少一个参考光束,且被处理单元标记为光点,处理单元依据光点位于多个像素单元的位置,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者。
9.进一步而言,所述的影像采集装置中,至少一个发光单元的每一个包括激光以及不可见光发光单元的至少一者。
10.进一步而言,所述的影像采集装置中,至少一个发光单元的数量为多个,至少一个发光单元环设于影像感测器之外,且排列为圆形、椭圆形或多边形。
11.进一步而言,所述的影像采集装置中,还包括壳体以及可挠性支架。其中,壳体容置至少一个发光单元以及影像感测器。可挠性支架连接壳体,且调整壳体对应待测物的位置与距离。
12.进一步而言,所述的影像采集装置中,还包括储存单元,储存单元耦接处理单元,且储存有出厂设定。其中,处理单元依据出厂设定以及影像感测器接收的至少一个参考光束,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者。
13.本发明的另一目的在于提供一种影像采集方法,可以避免现有技术的不便携行、校正后的歪斜影像更失真以及无法发挥所有像素构成的最大解析度的技术问题,达到方便携行、准确度高以及解析度高的目的。
14.为了达到前述另一目的,本发明所提出的影像采集方法应用于待测物,且影像采集方法包括下列步骤:调整输出至待测物的至少一个参考光束,使至少一个参考光束与影像感测器的光轴平行。调整至少一个参考光束对应待测物的位置,使至少一参考光束投射至预设位置。当至少一个参考光束与光轴平行,且至少一个参考光束投射至预设位置之后,产生出厂设定。影像感测器依据待测物产生多个像素资料。依据出厂设定以及影像感测器接收的反射自待测物的至少一个参考光束,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像。
15.进一步而言,所述的影像采集方法中,影像感测器包括产生多个像素资料的多个像素单元,还包括下列步骤:当影像感测器接收至少一个参考光束时,多个像素单元的至少一者接收到至少一个参考光束,且被标记为光点。依据光点位于多个像素单元的位置,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者。
16.进一步而言,所述的影像采集方法中,还包括下列步骤:调整影像感测器以及输出至少一个参考光束的至少一个发光单元对应待测物的距离。
17.进一步而言,所述的影像采集方法中,至少一个发光单元的数量为多个,至少一个发光单元环设于影像感测器之外,且排列为圆形、椭圆形或多边形。
18.在使用本发明所述影像采集装置以及影像采集方法时,可以在出厂前先调整输出至待测物的至少一个参考光束,使至少一个参考光束与影像感测器的光轴平行,且产生与所述预设位置相关的出厂设定。继而,当一般使用者在使用所述影像采集装置时,可依当前
环境,直接将影像感测器对待测物进行拍摄,以产生多个像素资料,而不必如出厂前校正环境或实验室那样准确。最后,处理单元可依据出厂设定以及影像感测器接收的反射自待测物的至少一个参考光束,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像。亦即,通过预先储存的出厂设定里关于参考光束与预设位置的信息,处理单元可以知道位于当前环境的至少一个参考光束所具有的偏移量,进而对多个像素资料进行重新排列、部分删除以及部分新增的至少一者。由于所述校正是在将多个像素资料组成校正图像之前,故不会有减损解析度的问题,且不会有多个纹理之间的比例关系不正确(例如脸歪嘴斜)的状况。
19.为此,本发明所述影像采集装置以及影像采集方法,可以避免现有技术的不便携行、校正后的歪斜影像更失真以及无法发挥所有像素构成的最大解析度的技术问题,进而达到方便携行、准确度高以及解析度高的目的。
20.为了能更进一步了解本发明为达成预定目的所采取的技术、手段及功效,请参阅以下有关本发明的详细说明与附图,相信本发明特征与特点,当可由此得一深入且具体的了解,然而所附图式仅提供参考与说明用,并非用来对本发明加以限制者。
附图说明
21.图1为本发明影像采集装置的系统架构图;图2为本发明影像采集装置的外观示意图;图3为本发明第一实施例的影像采集装置的壳体仰视图;图4为本发明影像采集方法的出厂校正示意图;图5a及图5b为本发明影像采集方法的出厂校正流程图;图6至图8为本发明影像采集方法的操作示意图;图9为本发明影像采集方法的操作流程图;图10为本发明第二实施例的影像采集装置的壳体仰视图;图11为本发明第三实施例的影像采集装置的壳体仰视图;以及图12为本发明第四实施例的影像采集装置的壳体仰视图。
22.图中:10:发光单元;11:参考光束;20:影像感测器;21:像素单元;30:处理单元;40:储存单元;41:出厂设定;50:透镜;60:壳体;100:壳体;200:可挠性支架;300:连接器;400:待测物;c:中心位置;h:距离;pi、pj、pn、pm:预设位置;p’i、p’j:位置;a、b:光点位置;s1~s7:步骤。
具体实施方式
23.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
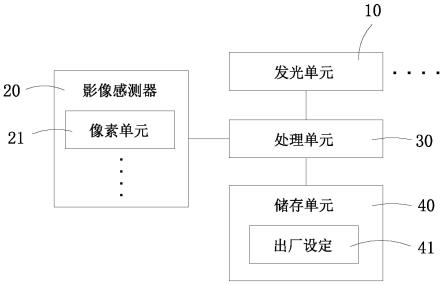
24.请参阅图1至图3所示,其中,图1为本发明影像采集装置的系统架构图;图2为本发明影像采集装置的外观示意图;图3为本发明第一实施例的影像采集装置的壳体仰视图。
25.本发明所述的影像采集装置可应用于待测物(图中未示),且影像采集装置可包括:至少一个发光单元10、影像感测器20、处理单元30以及储存单元40。其中,至少一个发光
单元10的每一个对待测物输出至少一个参考光束(图中未示)。在本发明的第一实施例中,至少一个发光单元10的每一个可包括激光以及不可见光发光单元的至少一者,且配置于邻近影像感测器20的位置(如图3所示)。所述不可见光可包括红外线(infrared, ir)或紫外线(ultraviolet, uv)。
26.影像感测器20可接收反射自待测物的至少一个参考光束,且依据待测物产生多个像素资料。进一步而言,所述影像感测器20可包括多个像素单元21,多个像素单元21用以产生所述多个像素资料。其中,多个像素单元21的至少一者可接收到至少一个参考光束,且已接收到至少一个参考光束的部分像素单元21可被处理单元30标记为光点。
27.处理单元30可耦接至少一个发光单元10以及影像感测器20。所述影像感测器20可包括:电荷耦合元件(charge-coupled device, ccd)或互补式金属氧化物半导体(complementary metal oxide semiconductor, cmos)等。继而,影像感测器20可将光线中的光信号转变为具特殊电性的电信号。
28.储存单元40耦接处理单元30,且储存有出厂设定41。在本发明的第一实施例中,依据出厂设定41、光点位于多个像素单元21的位置、以及影像感测器20接收的至少一个参考光束,处理单元30可对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像(图中未示)。
29.在本发明的第一实施例中,所述影像采集装置可还包括:壳体100、可挠性支架200以及连接器300。其中,壳体100可容置至少一个发光单元10以及影像感测器20。可挠性支架200可连接壳体100,且可调整壳体100对应待测物的位置与距离。连接器300耦接可挠性支架200,且可插设于电脑主机或其他电子设备,连接器300用以支撑可挠性支架200,且使影像感测器20可通过可挠性支架200以及连接器300进行资料传输。其中,连接器300可以是usb埠口,然而本发明不受此限制。
30.进一步而言,所述影像采集装置可还包括:透镜50与壳体60。其中,壳体60包覆透镜50与影像感测器20,且透镜50外露于壳体60的其中一侧面上。如图3所示,所述透镜50可配置于待测物400以及影像感测器20之间,用以汇聚反射自待测物400的光,且将其输入至影像感测器20。且进一步而言,所述发光单元10可以是两个,且可相对预设位置pi、pj、pn以及pm配置为如图3所示。并且,两个发光单元10可对应待测物400的预设位置pi以及pj。
31.请参阅图4至图5b所示,其中,图4为本发明影像采集方法的出厂校正示意图;图5a及图5b为本发明影像采集方法的出厂校正流程图。其余相关元件的编号可参照前述说明以及图示,在此不再赘述。
32.在本发明所述影像采集装置在进行出厂校正时,可具有下列方案:
«
方案一
»ꢀ
如图5a所示,首先使壳体100与待测物400中心位置c之间的距离配置为h,亦即调整影像感测器20以及输出至少一个参考光束的至少一个发光单元10对应待测物400的距离为h (步骤s1)。继而,调整壳体100位置,亦即调整至少一个参考光束对应待测物400的位置,使二个参考光束投射至预设位置pi以及pj (步骤s2)。最后,在确保至少一个参考光束与影像感测器20的光轴平行之后,将影像感测器20所接收到反射自pi以及pj的至少一个参考光束的信息进行储存,以产生所述出厂设定41 (步骤s3)。
33.«
方案二
»ꢀ
如图5b所示,调整输出至待测物400的至少一个参考光束,使至少一个参考光束与影像感测器20的光轴平行 (步骤s4)。继而,调整壳体100位置,使二个参考光束
投射至预设位置的pn以及pm (步骤s2)。最后,将影像感测器20所接收到反射自pn以及pm的至少一个参考光束的信息进行储存,以产生所述出厂设定41 (步骤s3)。
34.请参阅图6至图9所示,其中,图6至图8为本发明影像采集方法的操作示意图;图9为本发明影像采集方法的操作流程图。其余相关元件的编号可参照前述说明以及图示,在此不再赘述。
35.如图6所示,假设待测物400相对于多个发光单元10以及影像感测器20均为平行时,多个参考光束11可视为与影像感测器20的光轴平行。所述多个参考光束11可投射至待测物400的预设位置pi以及pj,继而通过透镜50达成一次交错之后,投射至影像感测器20。此时,在影像感测器20上所记录到的光点位置可视为出厂设定。
36.如图7所示,当使用者操作本发明的影像采集装置时,可能会使得待测物400与多个发光单元10以及影像感测器20均不平行,且多个参考光束11投射到待测物400上的位置变成p’i以及p’j。进一步而言,依据待测物400的倾斜状况,多个参考光束11的每一个,其在影像感测器20的多个像素单元21的位置偏移量可能并不相同。此时,在影像感测器20上所记录到的光点的位置相对出厂设定来说具有偏移。
37.如图8以及图9所示,所述影像感测器20可依据待测物400产生多个像素资料(步骤s5)。在影像感测器20的多个像素单元21中,若出厂设定的光点位置是a,而使用者操作本发明的影像采集装置时,影像感测器20上所记录到的光点位置是b。此时,处理单元30依据光点位于多个像素单元21的位置,就可以判断出待测物400相对于影像感测器20的偏移程度(步骤s6)。继而,处理单元30可针对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像(步骤s7)。此外,处理单元30还可以依据光信号的强度判断待测物400与影像感测器20的相对距离。
38.请参阅图10至图12所示,其中,图10为本发明第二实施例的影像采集装置的壳体仰视图;图11为本发明第三实施例的影像采集装置的壳体仰视图;图12为本发明第四实施例的影像采集装置的壳体仰视图。
39.如图10所示,在本发明的第二实施例中,与前述第一实施例大致相同,而至少一个发光单元10的数量总共为三个,所述多个发光单元10环设于影像感测器20之外,且排列为三角形。
40.如图11所示,在本发明的第三实施例中,与前述第二实施例大致相同,而多个发光单元10环设于影像感测器20之外,且排列为圆形或椭圆形。
41.如图12所示,在本发明的第四实施例中,与前述第二实施例大致相同,而多个发光单元10环设于影像感测器20之外,且排列为长方形。
42.在使用本发明所述影像采集装置以及影像采集方法时,可以在出厂前先调整输出至待测物400的至少一个参考光束11,使至少一个参考光束11与影像感测器20的光轴平行,且产生与所述预设位置相关的出厂设定41。继而,当一般使用者在使用所述影像采集装置时,可依当前环境,直接将影像感测器20对待测物400进行拍摄,以产生多个像素资料,而不必如出厂前校正环境或实验室那样准确。
43.最后,处理单元30可依据出厂设定41以及影像感测器20接收的反射自待测物400的至少一个参考光束11,对多个像素资料进行重新排列、部分删除以及部分新增的至少一者之后,产生校正图像。亦即,通过预先储存的出厂设定41里关于参考光束11与预设位置的
信息,处理单元可以知道位于当前环境的至少一个参考光束11所具有的偏移量,进而对多个像素资料进行重新排列、部分删除以及部分新增的至少一者。由于所述校正是在将多个像素资料组成校正图像之前,故不会有减损解析度的问题,且不会有多个纹理之间的比例关系不正确(例如脸歪嘴斜)的状况。
44.为此,本发明所述影像采集装置以及影像采集方法,可以避免现有技术的不便携行、校正后的歪斜影像更失真以及无法发挥所有像素构成的最大解析度的技术问题,进而达到方便携行、准确度高以及解析度高的目的。
45.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。