1.本发明涉及潜水员水下呼吸系统领域,具体地,涉及水下可穿戴辅助机器人。
背景技术:
2.在潜水员进行水肺潜水时,需要配备气瓶,呼吸调节器,浮力调整装置浮力调整设备,配重,脚蹼,潜水电脑等装备。气瓶中充有用于呼吸等的高压空气,但人不可以直接吸入气瓶里的高压气体,这就需要通过呼吸调节器来进行降压。脚蹼又称蛙鞋,具有较大的面积以在水中提高运动的推力。浮力调整设备和配重共同作用使得人体和装备总体呈中性浮力状态。此外在水下移动时还需要潜水员保持正确的姿态:肩膀,胯骨和膝盖基本处于一条水平线上,并且这条水平线是身体的最低点,头适当抬起,膝盖弯曲,脚蹼是整个人的最高点。正确的姿态不仅降低了前进过程中的阻力,节约体力,还能保障潜水的深度不会因为蹬动脚蹼而大幅变化;
3.现有的水肺潜水装备有如下局限性:
4.1、前进推力由潜水员蹬动脚蹼提供,不仅推力有限,而且消耗大量体力,也会增大呼吸耗气量。
5.2、保持正确的水下姿态不仅需要熟练的技巧,还正确的装备设置,两者缺一不可。这就意味着潜水员下水之前要进行充分的学习和训练,否则轻则潜水效果欠佳,重则发生安全事故。现有的浮力调整设备依靠手动调节。
6.因此,需要一款具有推力系统提供动力,电控浮力调整设备自动调节浮力分布,修正水下姿态的可穿戴机器人可以扩大潜水活动的范围,提升潜水作业的效率,保障潜水过程的安全,降低潜水员的入门门槛;
7.专利文献cn213057449u公开了一种具有潜水辅助器的干式潜水衣,该具有潜水辅助器的干式潜水衣设置有水阻片,在使用过程中,当潜水者手臂向后滑动,水阻片张开,对增大了人的手臂和水的接触面积,当潜水者手臂向前伸直,水阻片闭合,减小了水阻,但此装置在潜水中可能面临着潜水人员因潜水姿势的错误,导致更多的体力进行浪费,此装置也没有额外的动力帮助潜水人员进行移动;
8.专利文献cn107336818a公开了可穿戴水下外骨骼支架系统,通过浮力系统、呼吸系统和推进系统的设置,使此装置能辅助人体在水下进行活动,使得人体在水下活动时,游动速度更快且省力,当推进系统的失去动力后,无法对在水下的潜水人员提供省力帮助。
技术实现要素:
9.针对现有技术中的缺陷,本发明的目的是提供水下可穿戴辅助机器人。
10.根据本发明提供的一种水下可穿戴辅助机器人,包括:供气系统、浮力调节系统,以及控制器;所述浮力调节系统具有呼吸调节器、节流阀和浮力气囊,所述呼吸调节器有三个腔室,所述三个腔室包括高压室、中压室和环境压室,所述中压室连接人体呼吸系统;当中压室的气体消耗时,压强减小,环境压室的压力通过隔膜顶杆传递至高压腔室喷口,进而
高压腔室喷口高度能够调节,高压气流进入中压室补充气体,中压室压强提高,高压腔室喷口重新关闭;所述供气系统能够为浮力浮力调节系统提供压缩气体,当浮力气囊需要更大的浮力时,进气口节流阀开启,出气口节流阀关闭;当浮力气囊需要更小的浮力时,进气口节流阀关闭,出气口节流阀开启,气囊中气体排入中压室;所述控制器与微处理器电性连接;
11.优选的,所述供气系统包括气瓶,所述气瓶通过导气管连接到高压室,咬嘴通过导气管连接到中压室所述中压室依次通过导气管、咬嘴连接所述人体呼吸系统;
12.优选地,所述呼吸调节器的内部包括高压室,所述高压室的下方沿下依次设置有中压室、隔膜顶杆、环境压室,所述隔膜顶杆上方安装有高压腔室喷口,所述隔膜顶杆的下方安装有复位弹簧高压腔室喷口;
13.优选地,所述供气系统上安装有推进系统,所述推进系统包括微处理器、电源以及螺旋桨,所述电源分别与微处理器、螺旋桨电性连接,所述微处理器与节流阀电性连接;
14.优选地,所述浮力调节系统包括节流阀,所述节流阀的一侧安装有浮力气囊;
15.优选地,所述浮力气囊均设置有多组;
16.优选地,所述复位弹簧与隔膜顶杆弹性连接;
17.优选地,所述隔膜顶杆的顶端从中压室的内部贯穿至高压室的内部;
18.优选地,所述螺旋桨在气瓶的两侧均设置有多组,且多组螺旋桨相对气瓶呈对称布置;
19.优选地,具有如下一种或任意多种部件:
20.压力表;
21.温度计;
22.指北针;
23.陀螺仪;
24.加速度传感器;
25.与现有技术相比,本发明具有如下的有益效果:
26.1、本发明通过前进推力由螺旋桨和潜水员蹬动脚蹼共同提供,一方面加快了水下移动速度,扩展了水下作业的工作范围,另一方面节约了潜水员的体力,进而节约的呼吸耗气量,延长了同等气瓶容量下潜水作业的时间;
27.2、本发明通过由电控浮力调整设备自动地根据传感检测系统测得的人体姿态,使亲水人员更加明白自身在水下的状态,同时利用控制器进行统一控制,进而使此装置的操作可控制会更加便捷,提高了此装置的适用性;
28.3、本发明通过闭环控制校正潜水员的水下姿态,还可以帮助保持潜水员在水下的正确姿态,进而降低前进的阻力,保证潜水作业的安全性,降低了潜水作业的学习难度;
附图说明
29.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
30.图1为本发明的主体工作原理结构示意图;
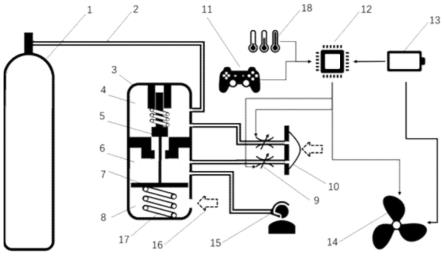
31.图2为本发明的正视结构立体结构示意图;
32.图中示出:1、气瓶;2、导气管;3、呼吸调节器;4、高压室;5、高压腔室喷口;6、中压室;7、隔膜顶杆;8、环境压室;9、节流阀;10、浮力气囊;11、控制器;12、微处理器;13、电源;14、螺旋桨;15、咬嘴;16、水环境;17、复位弹簧;18、检测模块。
具体实施方式
33.下面结合具体实施例对本发明进行详细说明。以下实例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
34.请参阅图1和图2,所示本发明提供了:一种水下可穿戴辅助机器人,包括:供气系统、浮力调节系统,以及控制器11,浮力调节系统具有呼吸调节器3、两组节流阀9和浮力气囊10,中压室6中的气压可供人体呼吸,伴随气体消耗,高压腔室喷口5会打开,向中压室6补充气体,浮力气囊10可以根据浮力大小的需要进行充放气,由节流阀9控制,控制器11与微处理器12电性连接,中压室6通过导气管2与咬嘴15进行连接;
35.浮力调节系统包括节流阀9,节流阀9的一侧安装有浮力气囊10,浮力气囊10充气膨胀后会有张力,平衡时气囊内的气压为水环境16压加弹性材料张力产生的压强隔膜顶杆7的顶端从中压室6的内部贯穿至高压室4的内部,控制器11控制充气和放气的节流阀9,进而调整气囊体积,改变提供浮力,调整水下人体的姿态,浮力气囊10的一种分布方式是:左右肩部各一个,腰部左右各一个,左右大腿根部膝关节上方各一个,左右脚踝处各一个;
36.请参阅图1和图2,所示供气系统包括气瓶1,气瓶1上安装有导气管2,导气管2的一端安装有咬嘴15,呼吸调节器3的内部包括高压室4,高压室4的下方沿下依次安装有中压室6、隔膜顶杆7、环境压室8,隔膜顶杆7的上方安装有高压腔室喷口5,隔膜顶杆7的下方安装复位弹簧17;
37.浮力气囊10均设置有多组,且多组浮力气囊10均与导气管2连接,复位弹簧17与隔膜顶杆7弹性连接;
38.请参阅图1和图2,所示供气系统上安装有推进系统,推进系统包括微处理器12、电源13以及螺旋桨14,电源13分别与微处理器12、螺旋桨14电性连接,微处理器12与节流阀9电性连接;
39.螺旋桨14在气瓶1的两侧均设置有多组,且多组螺旋桨14相对气瓶1呈对称布置,气瓶1通过背带固定在人体背部,呼吸调节器3通过紧固件安装在气瓶1的出气口附近,微处理器12,电源13和部分传感器集成在防水外壳内,通过紧固件安装在气瓶1两侧,推进系统的螺旋桨14不运行时闭合在防水外壳侧面的收纳舱内,需要提供推力时展开并旋转提供推力,控制器11触摸屏通过绑带或其他方式固定在左手小臂处,方便查看和操作;
40.请参阅图1和图2,所示检测模块18的内部设置有压力表、温度计、指北针、陀螺仪、加速度传感器等多个部件,陀螺仪、加速度传感器等部件用于检测人体姿态,而压力表、温度计、指北针等部件用于检测外界环境。传感与检测模块18会在上述各浮力气囊10处安装三轴加速度计和三轴磁传感器,两者配合来获取欧拉角进行肢体姿态解算,若当前姿态与理想姿态有偏差,则通过调整每个浮力气囊10的浮力来对姿态进行校正。
41.本发明的工作原理如下:
42.首先,将气瓶1在人体的背部进行穿戴,利用导气管2将咬嘴15与气瓶1、浮力气囊10与气瓶1进行连接,当潜水人员潜水时,通过控制器11控制螺旋桨14进行转动,继而为潜水人员提供动力,进而通过脚蹼和螺旋桨14的相互配合,可加快潜水人员的水下移动速度,还节约了潜水人员的体力;
43.其次,通过气瓶1进入水下,使环境压室8直接与外界水环境16相通,通过由复位弹簧17对隔膜顶杆7弹性支撑,将中压室6与环境压室8分隔,并且随着中压室6中气体消耗,气压下降,环境压室8内部的储水增多,隔膜顶杆7顶开高压腔室喷口5,使得高压室4内的气体流入中压室6,补充中压室6中供呼吸的气体;
44.最后,当根据位姿调整要求,浮力气囊10需要提供更大浮力时,控制系统打开进气口的节流阀9,高压室4中的气体流入浮力气囊10的内部,当浮力气囊10需要提供更小浮力时,控制系统打开出气口的节流阀9,使浮力气囊10中的气体流入中压室6的内部,进而利用浮力气囊10浮力的大小,使潜水人员进行水下的姿态调整,最终完成此装置的全部工作。
45.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
46.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。