1.本发明涉及一种固定装置,尤其涉及一种骨科小腿骨折固定装置。
背景技术:
2.人们小腿骨折后,需要一段时间的卧床疗养才能使断骨复位愈合,现有的骨折护理方法主要是采用石膏固定,为了能让腿部血液循环,医护人员会让患者保持伸直或者运动,由于石膏透气性不佳,使得在运动时小腿产生的汗液会滞留在石膏内从而影响患者小腿恢复,所以,需要设计一种固定装置。
3.专利申请:cn210330864u,公开日为20200417,公开了一种小腿骨折护理用固定装置,通过将支撑内板放置在腿支撑结构内部,提高腿支撑结构的强度,且不会影响腿支撑结构侧板的弹性,将脚和小腿放置在腿支撑结构内部,脚底部与垫板相贴合,将腿固定压板盖置在脚面和小腿前面,之后将连接带穿置在腿连接带孔和脚连接带孔内部将腿固定压板固定住,之后通过充气口向气囊内部充气,使得透气层贴合小腿,提高固定效果,并且在腿支撑结构外侧开设腿外板透气孔,并且腿固定压板外侧开设压板透气孔,该装置通过腿支撑结构对小腿进行固定,但该装置在使用时没有支撑身体重心的机构,容易使得患者身体重心发生改变造成摔跤。
4.我们设计了一种方便人们支撑的骨科小腿骨折固定装置,以达到克服现有的固定装置在使用时没有支撑身体重心的机构容易造成患者摔跤的效果。
技术实现要素:
5.针对现有技术的不足,本发明提供一种方便人们支撑的骨科小腿骨折固定装置,以克服现有的固定装置没有支撑身体重心机构的缺点。
6.为实现以上目的,本发明通过以下方案予以实现:一种骨科小腿骨折固定装置,包括有:拐杖和定位机构,拐杖右侧设有定位机构;安装架,定位机构上设有安装架;第一滑块,安装架上滑动式设有第一滑块;铰接板,第一滑块前侧铰接式连接有用于固定小腿的铰接板;固定机构,第一滑块、安装架和铰接板之间连接有用于带动第一滑块移动的固定机构。
7.作为上述方案的改进,定位机构包括有:第一导杆,拐杖右侧设有第一导杆;第一导套,第一导杆上滑动式设有第一导套,第一导套与安装架连接;第二导套,第一导杆上滑动式设有第二导套,第二导套位于第一导套上侧,第二导套与安装架连接;第一螺栓,第二导套后侧螺纹式设有用于卡住第二导套的第一螺栓。
8.作为上述方案的改进,固定机构包括有:丝杆,安装架上侧转动式设有丝杆;螺母,丝杆上螺纹式设有螺母,螺母与第一滑块连接;限位块,铰接板后部左侧设有限位块;活动杆,第一滑块右侧滑动式设有用于卡住铰接板的活动杆;第一弹簧,活动杆与第一滑块之间连接有第一弹簧,第一弹簧绕在活动杆上;磁铁,安装架内右侧设有磁铁,磁铁磁吸活动杆,铰接板后侧偏左侧开有卡槽。
9.作为上述方案的改进,还包括有实现自动转动铰接板的翻转机构,翻转机构包括有:直齿条,安装架内右侧偏下侧设有直齿条;直齿轮,铰接板下侧转动式设有直齿轮,直齿轮与直齿条啮合;第一扭簧,直齿轮与铰接板之间连接有第一扭簧,第一扭簧绕在铰接板上。
10.作为上述方案的改进,还包括有用于卡住丝杆的自锁机构,自锁机构包括有:第一安装套,安装架左侧偏前侧设有第一安装套;第二安装套,安装架左侧偏后侧设有第二安装套;棘齿轮,丝杆左侧设有棘齿轮;导轨,安装架左侧偏后侧设有导轨;第二滑块,导轨上滑动式设有第二滑块;棘齿条,第二滑块上滑动式设有棘齿条,棘齿条移动后与棘齿轮啮合;第二导杆,第二安装套与安装架之间设有第二导杆;连接杆,第二导杆上滑动式设有连接杆,连接杆与棘齿条啮合,连接杆与第二安装套和第一安装套滑动式连接;活动块,连接杆右侧偏前侧设有活动块;第二弹簧,活动块与第一安装套之间连接有第二弹簧,第二弹簧绕在连接杆上;第三弹簧,棘齿条下部前后两侧与第二滑块之间均连接有第三弹簧,第三弹簧绕在棘齿条上。
11.作为上述方案的改进,还包括有用于减小小腿承受压力的支撑机构,支撑机构包括有:第三滑块,安装架上侧滑动式设有第三滑块;铰接块,第三滑块上铰接式连接有铰接块;柔性安装板,铰接块前侧设有柔性安装板;第二扭簧,铰接块左右两侧与第三滑块之间均连接有第二扭簧,第二扭簧绕在铰接块上。
12.作为上述方案的改进,还包括有用于夹紧脚踝的夹紧机构,夹紧机构包括有:第四滑块,拐杖下侧滑动式设有第四滑块;第二螺栓,拐杖后侧偏下侧螺纹式设有第二螺栓;连接块,第四滑块右侧设有连接块;夹块,连接块右侧滑动式设有夹块;第四弹簧,夹块与连接块之间连接有第四弹簧;
橡胶块,连接块右侧均匀设有四个橡胶块,夹块左侧均匀设有四个橡胶块,橡胶块有八个。
13.作为上述方案的改进,第一滑块上开有适合安装螺母的通孔。
14.本发明的优点在于:1、本发明通过人们将小腿放置在安装架和铰接板之间,随后人们手动转动丝杆,从而使得铰接板与安装架对小腿进行固定,固定后,人们手握住拐杖进行行走,以此实现了支撑的效果,避免了人们在使用时身体重心发生改变从而造成摔跤;2、第一滑块向左移动带动铰接板向左移动,从而使得直齿轮向左移动,由于直齿轮与直齿条啮合,使得第一扭簧带动铰接板转动,以此实现了自动转动的效果,节省了人力;3、铰接板转动与活动块接触时,铰接板带动活动块向左移动,从而使得连接杆向左移动,使得第二滑块和棘齿条向上移动,随后棘齿条与棘齿轮啮合时,棘齿轮和丝杆被卡住,此时人们可停止转动丝杆,以此实现了自锁的效果,避免了铰接板对小腿过于夹紧。
附图说明
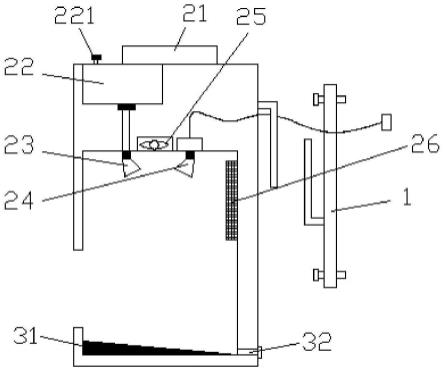
15.图1为本发明的立体结构示意图。
16.图2为本发明定位机构的第一种立体结构示意图。
17.图3为本发明定位机构的第二种立体结构示意图。
18.图4为本发明固定机构立体结构剖视图。
19.图5为本发明固定机构的部分立体结构示意图。
20.图6为本发明固定机构的部分立体结构剖视图。
21.图7为本发明翻转机构的立体结构示意图。
22.图8为本发明翻转机构的立体结构剖视图。
23.图9为本发明自锁机构的立体结构示意图。
24.图10为本发明自锁机构的立体结构剖视图。
25.图11为本发明自锁机构的部分立体结构剖视图。
26.图12为本发明支撑机构的立体结构示意图。
27.图13为本发明支撑机构的立体结构剖视图。
28.图14为本发明夹紧机构的立体结构示意图。
29.图15为本发明夹紧机构的部分立体结构剖视图。
30.附图标记中:1-拐杖,2-安装架,3-第一滑块,4-铰接板,5-定位机构,51-第一导杆,52-第一导套,53-第二导套,54-第一螺栓,6-固定机构,61-丝杆,62-螺母,63-限位块,64-活动杆,65-第一弹簧,66-磁铁,67-卡槽,7-翻转机构,71-直齿条,72-直齿轮,73-第一扭簧,8-自锁机构,81-第一安装套,82-活动块,83-第二弹簧,84-连接杆,85-第二安装套,86-第二导杆,87-导轨,88-第二滑块,89-棘齿条,810-第三弹簧,811-棘齿轮,9-支撑机构,91-第三滑块,92-铰接块,93-柔性安装板,94-第二扭簧,10-夹紧机构,101-第四滑块,102-第二螺栓,103-连接块,104-夹块,105-第四弹簧,106-橡胶块。
具体实施方式
31.下面,结合附图以及具体实施方式,对本发明做进一步描述:
实施例1一种骨科小腿骨折固定装置,现参考图1,包括有拐杖1、安装架2、第一滑块3、铰接板4、定位机构5和固定机构6,拐杖1右侧设有定位机构5,定位机构5用于调节铰接板4高度,定位机构5上设有安装架2,安装架2上滑动式设有第一滑块3,第一滑块3上开有通孔,第一滑块3前侧铰接式连接有铰接板4,第一滑块3、安装架2和铰接板4之间连接有固定机构6。
32.现参考图1-3,定位机构5包括有第一导杆51、第一导套52、第二导套53和第一螺栓54,拐杖1右侧焊接有第一导杆51,第一导杆51上滑动式设有第一导套52,第一导套52与安装架2连接,第一导杆51上滑动式设有第二导套53,第二导套53位于第一导套52上侧,第二导套53与安装架2连接,第二导套53后侧螺纹式设有第一螺栓54,第一螺栓54与第一导杆51接触。
33.现参考图1、图4、图5、图6和图11,固定机构6包括有丝杆61、螺母62、限位块63、活动杆64、第一弹簧65和磁铁66,安装架2上侧转动式设有丝杆61,丝杆61上螺纹式设有螺母62,螺母62与第一滑块3上的通孔连接,铰接板4后部左侧设有限位块63,安装架2与限位块63接触,第一滑块3右侧滑动式设有活动杆64,活动杆64用于卡住铰接板4,活动杆64与第一滑块3之间连接有第一弹簧65,第一弹簧65绕在活动杆64上,安装架2内右侧设有磁铁66,磁铁66磁吸活动杆64,铰接板4后侧偏左侧开有卡槽67,活动杆64移动后与卡槽67接触。
34.当人们需要对骨折的小腿进行固定时,人们可以使用这种骨科小腿骨折固定装置,首先人们手动转动第一螺栓54,使得第一螺栓54在转动过程中向后移动,当第一螺栓54远离第一导杆51时,人们根据自身小腿的位置上下移动第二导套53,从而使得第一导套52上下移动,安装架2上下移动,当安装架2移动至合适位置时,人们停止移动第二导套53,并手动反向转动第一螺栓54,使得第一螺栓54在反向转动的过程中向前移动,当第一螺栓54与第一导杆51接触时,人们停止转动第一螺栓54,此时第一螺栓54将第二导套53卡在第一导杆51上,随后人们将小腿放置在安装架2和铰接板4之间,将脚尖朝前,然后人们手动转动丝杆61,从而使得螺母62向左移动,使得第一滑块3和铰接板4向左移动,进而活动杆64向左移动,在丝杆61转动时,人们手动转动铰接板4,从而使得铰接板4和安装架2将小腿固定,使得卡槽67与活动杆64在同一水平线上,当活动杆64远离磁铁66时,磁铁66对活动杆64的磁力较小,使得被拉伸的第一弹簧65复位带动活动杆64向前移动与卡槽67接触,此时活动杆64将铰接板4卡住,人们可松开铰接板4,以此实现了固定的作用,人们可手握住拐杖1进行行走,当人们不需要固定时,人们手动反向转动丝杆61,从而使得螺母62向右移动,使得第一滑块3和铰接板4向右移动,进而活动杆64向右移动,当活动杆64与磁铁66接触时,在磁铁66磁吸的作用下,活动杆64向后移动远离卡槽67,使得第一弹簧65被拉伸,此时人们可手动反向转动铰接板4,使得限位块63反向转动与安装架2接触,限位块63避免了铰接板4过分反向转动,随后人们将小腿从铰接板4和安装架2中取出即可。
35.实施例2在实施例1的基础之上,现参考图1、图7和图8,还包括有翻转机构7,翻转机构7包括有直齿条71、直齿轮72和第一扭簧73,安装架2内右侧偏下侧通过螺栓固接有直齿条71,铰接板4下侧转动式设有直齿轮72,直齿轮72与直齿条71啮合,直齿轮72与铰接板4之间连接有第一扭簧73,第一扭簧73绕在铰接板4上。
36.现参考图1、图9、图10和图11,还包括有自锁机构8,自锁机构8包括有第一安装套
81、活动块82、第二弹簧83、连接杆84、第二安装套85、第二导杆86、导轨87、第二滑块88、棘齿条89、第三弹簧810和棘齿轮811,安装架2左侧偏前侧通过螺栓固接有第一安装套81,安装架2左侧偏后侧通过螺栓固接有第二安装套85,丝杆61左侧设有棘齿轮811,安装架2左侧偏后侧设有导轨87,导轨87上滑动式设有第二滑块88,第二滑块88上滑动式设有棘齿条89,棘齿条89移动后与棘齿轮811啮合,第二安装套85与安装架2之间设有第二导杆86,第二导杆86上滑动式设有连接杆84,连接杆84与棘齿条89啮合,连接杆84与第二安装套85和第一安装套81滑动式连接,连接杆84右侧偏前侧设有活动块82,铰接板4转动后与活动块82接触,活动块82与第一安装套81之间连接有第二弹簧83,第二弹簧83绕在连接杆84上,棘齿条89下部前后两侧与第二滑块88之间均连接有第三弹簧810,第三弹簧810绕在棘齿条89上。
37.现参考图1、图12和图13,还包括有支撑机构9,支撑机构9包括有第三滑块91、铰接块92、柔性安装板93和第二扭簧94,安装架2上侧滑动式设有第三滑块91,第三滑块91上铰接式连接有铰接块92,铰接块92前侧焊接有柔性安装板93,铰接块92左右两侧与第三滑块91之间均连接有第二扭簧94,第二扭簧94绕在铰接块92上。
38.现参考图1、图14和图15,还包括有夹紧机构10,夹紧机构10包括有第四滑块101、第二螺栓102、连接块103、夹块104、第四弹簧105和橡胶块106,拐杖1下侧滑动式设有第四滑块101,拐杖1后侧偏下侧螺纹式设有第二螺栓102,第二螺栓102与第四滑块101接触,第四滑块101右侧焊接有连接块103,连接块103右侧滑动式设有夹块104,夹块104与连接块103之间连接有第四弹簧105,连接块103右侧均匀设有四个橡胶块106,夹块104左侧均匀设有四个橡胶块106,橡胶块106有八个。
39.铰接板4向左移动带动直齿轮72向左移动,由于直齿轮72与直齿条71啮合,使得直齿轮72在向左移动的过程中发生转动,从而使得第一扭簧73扭转形变,随后在第一扭簧73的弹力下,铰接板4发生转动,然后活动杆64向前移动将铰接板4卡住,以此实现了自动转动的效果,节省了人力,铰接板4向右移动带动直齿轮72向右移动,当直齿轮72与直齿条71啮合时,直齿轮72在向右移动的过程中发生反向转动,第一扭簧73起缓冲的作用,此时活动杆64在磁铁66的作用下向后移动远离铰接板4。
40.丝杆61转动带动棘齿轮811转动,当铰接板4转动与活动块82接触时,铰接板4带动活动块82向左移动,从而使得连接杆84向左移动,使得第二弹簧83被压缩,此时连接杆84向左移动带动第二滑块88向上移动,使得棘齿条89向上移动,当棘齿条89向上移动与转动的棘齿轮811接触时,棘齿条89将棘齿轮811卡住,使得第三弹簧810被压缩,此时人们可停止转动丝杆61,丝杆61反向转动带动棘齿轮811反向转动,当铰接板4远离活动块82时,第二弹簧83复位带动活动块82向右移动,从而使得连接杆84向右移动,此时转动的棘齿轮811与棘齿条89接触时,棘齿轮811带动棘齿条89适应性上下移动,使得第三弹簧810适应性形变后复位,使得第二滑块88适应性上下移动。
41.当人们需要坐着休息时,人们根据大腿位置移动第三滑块91,从而使得柔性安装板93移动,当柔性安装板93移动至合适位置时,人们停止移动第三滑块91,膝关节弯曲时大腿与柔性安装板93接触,从而使得柔性安装板93转动,使得铰接块92转动,进而第二扭簧94扭转形变,以此实现了支撑的效果,减少了人们坐下时对小腿的压力,当人们站立时,第二扭簧94复位带动铰接块92反向转动复位,从而使得柔性安装板93反向转动。
42.当人们需要固定脚踝时,人们可手动转动第二螺栓102,使得第二螺栓102转动的
过程中向后移动,当第二螺栓102向后运动离开第四滑块101时,人们可根据脚踝的位置左右移动第四滑块101,使得连接块103左右移动,当连接块103移动至合适位置时,人们停止移动第四滑块101,并反向转动第二螺栓102,从而使得第二螺栓102反向转动的过程中向前移动,当第二螺栓102与第四滑块101接触时,人们停止转动第二螺栓102,随后人们向右移动夹块104,从而使得第四弹簧105被拉伸,使得左侧的四个橡胶块106向右移动,然后人们将脚踝放置在连接块103与夹块104之间时,人们松开夹块104,从而使得第四弹簧105复位带动夹块104向左移动,此时八个橡胶块106对脚踝进行夹紧,避免了在行走的过程中脚踝移动影响固定,当人们不需要夹紧时,人们向右移动夹块104,从而使得第四弹簧105被拉伸,随后人们将脚踝远离连接块103,然后人们松开夹块104,使得第四弹簧105复位带动夹块104复位。
43.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。