技术特征:
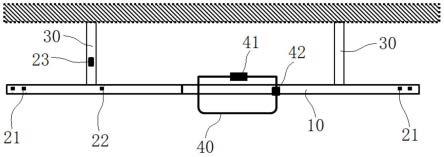
1.一种用于悬挂式机器人的导航定位辅助系统,其特征在于,包括:轨道,机器人沿所述轨道在第一方向或第二方向上可滑动,所述轨道的靠近两端的位置处分别设有限位标识;多个磁铁标识,多个所述磁铁标识在所述轨道的延伸方向上间隔开布置;多个轨道支架,每个所述轨道支架的一端分别与所述轨道连接;多个rfid标签,所述rfid标签设在所述轨道支架上,且每个所述rfid标签与一个所述磁铁标识相对应;伺服运动模块,所述伺服运动模块设在所述机器人中,以驱动所述伺服运动模块在所述轨道上滑动;控制模块,所述控制模块用于控制所述伺服运动模块在所述轨道上可滑动,所述控制模块设在所述机器人中;传感器模块,所述传感器模块设在所述机器人中,所述传感器模块用于收集所述rfid标签、所述磁铁标识和所述限位标识的信息,并根据收集的信息重新计算确定或校准所述机器人在所述轨道上的绝对位置。2.根据权利要求1所述的用于悬挂式机器人的导航定位辅助系统,其特征在于,所述限位标识为两个磁铁,两个所述磁铁间隔开布置在所述轨道的靠近端部的位置处。3.根据权利要求2所述的用于悬挂式机器人的导航定位辅助系统,其特征在于,每个所述限位标识中的两个所述磁铁的间距为10-30cm。4.根据权利要求1所述的用于悬挂式机器人的导航定位辅助系统,其特征在于,所述传感器模块包括:读卡器和霍尔传感器,所述读卡器和所述霍尔传感器间隔开设在所述机器人中,所述读卡器用于读取所述rfid标识的信息,所述霍尔传感器用于读取所述磁铁标识和所述限位标识的信息。5.一种用于悬挂式机器人的导航定位方法,应用于权利要求1-4中任一项所述的用于悬挂式机器人的导航定位辅助系统,其特征在于,所述导航定位方法包括以下步骤:接收轨道信息收集命令;驱动机器人在轨道上沿第一方向或第二方向滑动;收集rfid标签、磁铁标识和限位标识的信息,并根据伺服运动模块获取的里程值,重新计算确定或校准所述机器人在所述轨道上的绝对位置。6.根据权利要求5所述的用于悬挂式机器人的导航定位方法,其特征在于,所述的收集rfid标签、磁铁标识和限位标识的信息的步骤包括:检测到所述磁铁标识时,记录所述磁铁标识的信息m(x,y);其中,x为所述磁铁标识的标识号,y为所述磁铁标识对应的当前从所述伺服运动模块获取到的里程值,记为里程值s;检测到所述限位标识时,记录所述限位标识的信息m(x,y),并切换所述机器人的滑动方向;其中,x为所述限位标识的标识号,y为所述限位标识对应的当前从所述伺服运动模块获取到的里程值,记为里程值s;检测到所述rfid标签时,记录所述rfid标签的信息r(idx,y),其中,idx为从所述rfid标签中读取到的识别信息,记为id,y为读取到所述rfid标签时的里程值。7.根据权利要求6所述的用于悬挂式机器人的导航定位方法,其特征在于,将r(idx,y)和m(x,y)的里程值相比较,若|r(y)-m(y)|<d,d为rfid感应范围,则所述rfid标签与所述磁
铁标识为相对应的一对,记为rm(idx,x,y),且在所述机器人沿所述第一方向和所述第二方向运动过程中均检测到所述限位标识时,所述机器人停止运动。8.根据权利要求7所述的用于悬挂式机器人的导航定位方法,其特征在于,所述的重新计算确定或校准所述机器人在所述轨道上的绝对位置的步骤包括:将记录到的m(x,y)按标识号进行排序,并用最大标识号对应的里程值减去最小标识号对应的里程值,获得所述轨道的长度信息,记为glen;将rm(idx,x,y)的各个标识信息中的里程值与最小标识号对应的里程值相减,然后更新rm(idx,x,y)中各个标识的里程值,得到所述机器人在所述轨道上的绝对位置;其中,rm(idx,x,y)中,idx为从所述rfid标签中读取到的识别信息,x为所述限位标识的标识号,y为磁铁标识的绝对位置。9.根据权利要求8所述的用于悬挂式机器人的导航定位方法,其特征在于,所述的重新计算确定或校准所述机器人在所述轨道上的绝对位置的步骤还包括:当检测到所述轨道在所述第一方向末端的所述限位标识的信息m(x,y)时,记为o=m(y);其中,m(y)为所述限位标识对应的当前从所述伺服运动模块获取到的里程值;当检测到所述轨道在所述第二方向末端的限位标识时,记为o=m(y)-glen;其中,m(y)为所述限位标识对应的当前从所述伺服运动模块获取到的里程值,glen为获得所述轨道的长度信息;当检测到所述rfid标签和所述磁铁标识时,将从所述rfid标签中读取到的识别信息id与记录的rm(idx,x,y)进行比较,并匹配到记录的idx,则o=rm(y)-rm(y)。10.一种机器人,其特征在于,包括:处理器和存储器,在所述存储器中存储有计算机程序指令,其中,在所述计算机程序指令被所述处理器运行时,使得所述处理器执行权利要求5-9中任一项的用于悬挂式机器人的导航定位方法的步骤。11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器运行时,使得所述处理器执行权利要求5-9中任一项的用于悬挂式机器人的导航定位方法的步骤。
技术总结
本申请公开了一种用于悬挂式机器人的导航定位辅助系统及导航定位方法,导航定位辅助系统包括:轨道,轨道设有限位标识;多个磁铁标识,多个磁铁标识设在轨道上;多个轨道支架,每个轨道支架分别与轨道连接;多个RFID标签,RFID标签设在轨道支架上;伺服运动模块,伺服运动模块设在机器人中;控制模块,控制模块设在机器人中;传感器模块,传感器模块设在机器人中,传感器模块用于收集RFID标签、磁铁标识和限位标识的信息,并根据收集的信息重新计算确定或校准机器人在轨道上的绝对位置。本申请通过磁铁标识、RFID标签以及限位标识综合进行位置的标定和校准,可以高速可靠的对机器人进行导航定位辅助,提高定位精度。提高定位精度。提高定位精度。
技术研发人员:李柏文 祝涛剑 孙保川 柏林 刘彪 舒海燕 宿凯 沈创芸 雷宜辉 王恒华
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:2022.03.11
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。