1.本发明涉及一种用于机动车辆的转向系统,所述转向系统被设计为线控转向系统。
背景技术:
2.转向系统通常包括为了调整车轮位置而以可线性移位的方式被支承的齿条。起初这样的齿条是藉由转向杆与方向盘耦接的,从而使得通过方向盘的转动来实现齿条的线性移位。
3.在现代的机动车辆中,可以使用所谓的线控转向系统(sbw(steer-by-wire)转向系统),其中在方向盘与齿条之间不再有机械的连接。齿条的移位借助电驱动器来实现。在此,可能会产生作用到齿条上从而造成齿条发生不期望的旋转的扭力。
4.由于方向盘与齿条之间不再有机械的连接,因此在线控转向系统中对齿条的支承和引导方式不同于传统的转向系统。
5.尤其对齿条的引导方式的要求发生了变化,这是因为在线控转向系统中的电驱动器可能会产生很高的(例如高于13kn)的推力,这在引导齿条时必须加以考虑。
6.此外,电驱动器还将转矩传递到齿条上。在此,可能会产生作用到齿条上从而造成齿条发生不期望的旋转的扭力。此外,齿条原则上应在尽可能低摩擦的情况下被引导,从而使得在机动车辆正在转向时齿条可以顺畅地滑过转向系统。
技术实现要素:
7.因此,本发明的目的是提供一种可靠的转向系统,利用该转向系统可以调节尤其是在线控转向系统中的齿条。
8.为了实现该目的,提出一种用于机动车辆的转向系统,所述转向系统被设计为线控转向系统。所述转向系统包括齿条、用于使所述齿条纵向移位的电驱动器、蜗轮蜗杆传动装置以及与所述齿条啮合嵌接的驱动轴。所述电驱动器在此借助所述蜗轮蜗杆传动装置与所述驱动轴相连接以传递转矩。
9.已认识到,借助蜗轮蜗杆传动装置可以使电驱动器特别可靠以及低噪音地与驱动轴耦接以传递转矩,这是因为与其他带齿驱动装置相比,蜗轮蜗杆传动装置具有高承受负载能力。
10.在此,所述蜗轮蜗杆传动装置具有蜗轮以及与所述蜗轮接合的蜗杆轴。所述蜗轮以传递转矩并且/或者不可旋转的方式与驱动轴相连接,并且蜗杆轴以传递转矩并且/或者不可旋转的方式与电驱动器相连接。在这方面所具有的优点是,可以根据可用的空间将蜗杆轴和电驱动器排列在蜗轮上。因此,转向系统可以灵活地适配不同的空间需求并因此是特别紧凑的。
11.此外可以提出的是,所述电驱动器包括第一电动马达和第二电动马达。以该方式可以借助冗余性来进一步提高可靠性。附加地或替代性地,这两个电动马达与单个电动马
达相比可以设计得更小,从而使得可以减少或更有利地布置所需的安装空间。
12.根据实施例,所述第一电动马达和所述第二电动马达借助一个共同的蜗杆轴与所述蜗轮相连接以传递转矩。由此转向系统是特别紧凑的。
13.根据替代性的实施例,所述蜗轮蜗杆传动装置具有与所述蜗轮接合的第二蜗杆轴。第一蜗杆轴以传递转矩并且/或者不可旋转的方式与第一电动马达相连接并且第二蜗杆轴以传递转矩并且/或者不可旋转的方式与第二电动马达相连接。因为这两个电动马达分别藉由自己的蜗杆轴各自与蜗轮连接,这进一步提高了转向系统的可靠性。此外,与单个蜗杆轴相比,这两个蜗杆轴可以设计得更小,由此可以减少重量和/或所需的安装空间。
14.此外,所述第一蜗杆轴和所述第二蜗杆轴可以被布置在所述蜗轮的彼此相对的径向侧上,尤其是其中所述第一蜗杆轴的旋转轴线与所述第二蜗杆轴的旋转轴线平行地延伸。由此确保了有效的力分配,并且可以将蜗杆轴用作针对蜗轮的支承,从而使得分配给蜗轮的支承可以制造得更紧凑或者可以完全被省去。
15.在实施例中,所述转向系统具有两个支承衬套,所述支承衬套沿所述齿条的纵向方向彼此间隔开。所述支承衬套一起形成齿条引导部。此外,所述驱动轴沿所述齿条的纵向方向被布置在所述两个支承衬套之间。通过支承衬套来有效地支撑齿条以抵抗挠曲,从而确保了驱动轴和齿条的可靠且精确的接合。此外,齿条可以借助支承衬套在特别低摩擦的情况下被支承。
16.此外可以提出的是,所述驱动轴布置在所述转向系统的一位置、尤其相对于所述齿条沿所述齿条的纵向方向居中地布置在所述转向系统的中性位置。因此,作用的力可以特别均匀地分布在齿条上,并且因此可以减少齿条的负载。
17.所述转向系统可以具有压块,所述压块被布置在所述驱动轴的区域中并且所述压块支撑所述齿条。更精确地说,压块将齿条压靠向驱动轴,以确保使驱动轴与齿条保持啮合嵌接。
18.所述压块尤其由塑料材料形成并且因此可以以质量较小及便宜的方式制造。
19.在另外的实施例中,所述转向系统具有尤其是无线的转矩传感器,所述转矩传感器被设置成用于确定所述驱动轴的转矩。由此可以精确地确定在齿条上传递的力。
20.此外,所述齿条具有齿部,所述驱动轴藉由所述齿部与所述齿条处于啮合嵌接。所述齿条从第一端部到所述齿部以及从所述齿部到与所述第一端部相对的第二端部均具有恒定的横截面。以该方式,使得齿条可以被设计得特别具有抗性,尤其是在挠曲方面。此外,齿条由此可以在齿部的区域被切入更深或被平坦化,以便在驱动轴与齿条之间提供更大的接触区域。
附图说明
21.其他优点和特征由以下描述以及附图得出。在附图中:
[0022]-图1以示意性侧视图示出根据本发明的转向系统;
[0023]-图2以示意性俯视图示出图1的转向系统;
[0024]-图3以示意性剖面图示出沿图1中的线a-a穿过转向系统的剖面;以及
[0025]-图4以示意性俯视图示出根据另外的实施方式的根据本发明的转向系统。
具体实施方式
[0026]
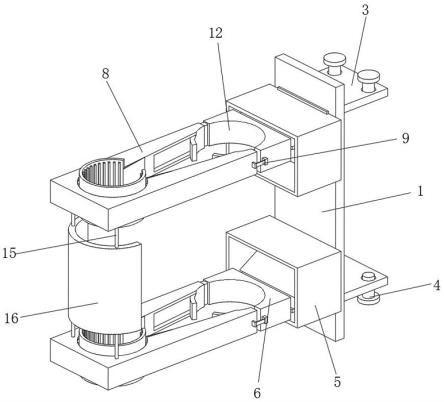
图1中示出了用于机动车辆的转向系统10。
[0027]
转向系统10是所谓的线控转向系统,其中在可以由驾驶员操纵的方向盘12与机动车辆的车轮之间并不存在机械连接来传递转向运动。
[0028]
转向系统10具有齿条14和电驱动器16。电驱动器16在此被配置成用于使齿条14进行纵向移位,也就是说进行平移式移位,以便根据驾驶员的转向意愿来调整机动车辆的车轮的位置。
[0029]
在所示的实施例中,电驱动器16包括第一电动马达18和第二电动马达19。
[0030]
原则上,电驱动器16可以具有任意数量的电动马达,特别地可以仅具有唯一的电动马达18、19。
[0031]
方向盘12在此藉由控制单元20与电动马达18、19耦接以传输信号。由此,在方向盘12与齿条14之间只存在电连接。
[0032]
为了清楚起见,方向盘12和控制单元20未在图2(和图4)中示出。
[0033]
为了使电驱动器16与齿条14耦接以传递转矩,转向系统10具有蜗轮蜗杆传动装置22以及驱动轴28,该蜗轮蜗杆传动装置具有蜗轮24以及与蜗轮24接合的蜗杆轴26,所述驱动轴藉由齿部30与齿条14(参见图2)进行啮合嵌接。
[0034]
蜗轮24以不可旋转的方式连接到驱动轴28,并且蜗杆轴26连接到电驱动器16以传递转矩。
[0035]
为此,两个电动马达18、19被布置在蜗杆轴26的相对两端部处并且藉由控制单元20被相对应地控制,以驱动共同的蜗杆轴26。
[0036]
为了与齿条14啮合嵌接,驱动轴28在与齿部30的接触区域34中具有小齿轮形的区段32(参见图3)。
[0037]
图3在此示出了沿图1中的线a-a穿过转向系统10的在驱动轴28的区域中的剖面。
[0038]
转向系统10还具有压块36,该压块在与接触区域34相对的一侧支撑齿条14。由此抑制齿条14的挠曲,并且因此可靠地确保驱动轴28与齿条14之间的啮合嵌接。此外,压块36确保有效地抑制噪音。
[0039]
为了确保特别稳定的啮合嵌接,转向系统10可以具有弹簧元件38,该弹簧元件朝齿条14或接触区域34的方向在压块36上施加弹簧力,如在图3中通过箭头所展示的那样。
[0040]
压块36与齿条14的接触表面40优选地与齿条14的几何形状相适配,并且特别是呈凹形。
[0041]
压块36优选由塑料材料形成。
[0042]
在所示的实施方式中,驱动轴28的旋转轴线r相对于齿条14的纵向轴线l倾斜了小于90
°
的角度α。由此,接触区域34特别大,从而使得力被特别有效地从驱动轴28传递到齿条14。
[0043]
如图2中所示,齿条14从第一端部42经由第一端部区段44延伸到具有齿部30的齿部区段46,并且从齿部区段46经由第二端部区段48延伸到与第一端部42相对地布置的第二端部50。
[0044]
齿部30在此仅被设置在齿部区段46中。这意味着,齿部30沿纵向轴线l的方向不会在齿条14的整个长度上延伸,而是仅在齿部区段46上延伸。
[0045]
齿部30的或齿部区段46的长度优选地对应于齿条14沿移位方向的最大平移式运动范围。
[0046]
第一端部区段44和第二端部区段48分别具有直径相同的恒定的圆形横截面。
[0047]
然而,原则上,端部区段44、48中的每个端部区段均可以具有任意期望的横截面。
[0048]
为了在机动车辆中引导齿条14,转向系统具有齿条引导部52,该齿条引导部具有分别在周边上支撑齿条14的第一支承衬套54和第二支承衬套55。
[0049]
在此,第一支承衬套54被布置在第一端部区段44中,并且第二支承衬套55被布置在第二端部区段48中。因此,接触区域34被布置在齿部30与驱动轴28之间、并且沿纵向轴线l的方向布置在两个支承衬套54、55之间,特别地被布置成在中间。
[0050]
在图1和图2中,转向系统10处于中性位置,也就是说处于其中机动车辆的车轮沿机动车辆的主运动方向(通常是正前方)定向时的位置。
[0051]
在该中性位置,驱动轴28沿纵向轴线l的方向相对于齿条14和齿部30居中地布置,从而在转向时使齿条14可以在两个方向(即向左和向右)上被相等地调节。
[0052]
齿条14相对于驱动轴28的位置或相对位置例如可以借助于与控制单元20相连接以传输信号的角度传感器或旋转编码器来确定。
[0053]
在所示的实施方式中,转向系统10还具有无线的转矩传感器56,该转矩传感器连接到控制单元20以传输信号并且被配置成用于确定借助驱动轴28所传递的或作用于驱动轴28中的转矩。
[0054]
控制单元20基于传感器数据来控制电驱动器16,以便将方向盘12的转向运动调节或转换成齿条14的对应的相对位置。
[0055]
当然,除了方向盘12的转向运动之外或替代于所述方向盘的转向运动,控制单元还可以考虑其他控制信号,尤其是例如在保持车道时对驾驶员进行辅助的控制信号,或者例如在自动驾驶模式或自动泊车模式中直接预确定轨迹的控制信号。
[0056]
现在基于图4来描述根据另外的实施例的转向系统10。针对由上述实施例所已知的构件使用相同的附图标记,并且在这方面参考前面的阐述。
[0057]
与图1和图2中所示的实施例相比,在图4中所示的转向系统10具有蜗轮蜗杆传动装置22,所述蜗轮蜗杆传动装置除了第一蜗杆轴26之外还设置有第二蜗杆轴58并且所述第二蜗杆轴与蜗轮24接合。
[0058]
在此,第一电动马达18藉由第一蜗杆轴26、以及第二电动马达19藉由第二蜗杆轴58与蜗轮24相连接并且因此与驱动轴28相连接以便传递转矩。
[0059]
这两个蜗杆轴26、58在此被布置成使得蜗轮24被布置在两个蜗杆轴26、58之间并且使得蜗杆轴26、58的旋转轴线e、f彼此平行延伸。
[0060]
在所有实施例中,以这种方式提供了一种转向系统10,借助该转向系统可以特别可靠且精确地设定齿条14的相对位置并且因此可精确地使机动车辆转向。
[0061]
蜗轮蜗杆传动装置22在此确保从电驱动器16到驱动轴28具有抗性高、极为有效且低噪音的力传递。
[0062]
此外,齿条14和齿条引导部52被设计成使得齿条14特别抗挠曲。
[0063]
本发明不限于所示实施例。尤其,一个实施例的各个特征可以任意地与其他实施例的特征组合,尤其独立于对应的实施例的其他特征。
[0064]
附图标记清单
[0065]
10
ꢀꢀꢀꢀꢀꢀꢀ
转向系统
[0066]
12
ꢀꢀꢀꢀꢀꢀꢀ
方向盘
[0067]
14
ꢀꢀꢀꢀꢀꢀꢀ
齿条
[0068]
16
ꢀꢀꢀꢀꢀꢀꢀ
电驱动器
[0069]
18
ꢀꢀꢀꢀꢀꢀꢀ
第一电动马达
[0070]
19
ꢀꢀꢀꢀꢀꢀꢀ
第二电动马达
[0071]
20
ꢀꢀꢀꢀꢀꢀꢀ
控制单元
[0072]
22
ꢀꢀꢀꢀꢀꢀꢀ
蜗轮蜗杆传动装置
[0073]
24
ꢀꢀꢀꢀꢀꢀꢀ
蜗轮
[0074]
26
ꢀꢀꢀꢀꢀꢀꢀ
(第一)蜗杆轴
[0075]
28
ꢀꢀꢀꢀꢀꢀꢀ
驱动轴
[0076]
30
ꢀꢀꢀꢀꢀꢀꢀ
齿部
[0077]
32
ꢀꢀꢀꢀꢀꢀꢀ
小齿轮形的区段
[0078]
34
ꢀꢀꢀꢀꢀꢀꢀ
接触区域
[0079]
36
ꢀꢀꢀꢀꢀꢀꢀ
压块
[0080]
38
ꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
[0081]
40
ꢀꢀꢀꢀꢀꢀꢀ
接触表面
[0082]
42
ꢀꢀꢀꢀꢀꢀꢀ
第一端部
[0083]
44
ꢀꢀꢀꢀꢀꢀꢀ
第一端部区段
[0084]
46
ꢀꢀꢀꢀꢀꢀꢀ
齿部区段
[0085]
48
ꢀꢀꢀꢀꢀꢀꢀ
第二端部区段
[0086]
50
ꢀꢀꢀꢀꢀꢀꢀ
第二端部
[0087]
52
ꢀꢀꢀꢀꢀꢀꢀ
齿条引导部
[0088]
54
ꢀꢀꢀꢀꢀꢀꢀ
第一支承衬套
[0089]
55
ꢀꢀꢀꢀꢀꢀꢀ
第二支承衬套
[0090]
56
ꢀꢀꢀꢀꢀꢀꢀ
转矩传感器
[0091]
58
ꢀꢀꢀꢀꢀꢀꢀ
第二蜗杆轴
[0092]eꢀꢀꢀꢀꢀꢀꢀꢀ
(第一蜗杆轴的)旋转轴线
[0093]fꢀꢀꢀꢀꢀꢀꢀꢀ
(第二蜗杆轴的)旋转轴线
[0094]
l
ꢀꢀꢀꢀꢀꢀꢀꢀ
(齿条的)纵向轴线
[0095]rꢀꢀꢀꢀꢀꢀꢀꢀ
(驱动轴的)旋转轴线
[0096]
α
ꢀꢀꢀꢀꢀꢀꢀ
角度
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。