1.本发明属于电动客车高压负载系统级故障诊断领域,涉及一种基于多域稀疏表达的电动客车高压负载系统故障诊断方法。
背景技术:
2.为了缓解能源危机和减少环境污染,电动客车近年来取得了快速发展,并在许多城市批量推广。然而,由于电动客车的动力电池电压平台最高达750v,电量多达500kwh,甚至更多,无论是电压平台还是存储电量都要远高于电动乘用车,并且作为载客公共交通工具,电动客车载客量也远超过私家电动乘用车,因此电动客车的高压系统安全非常重要,一旦出现高压系统故障,将严重威胁公共安全和人身安全。因此,要及时发现和消除电动客车高压系统的潜在风险,当然电动客车高压负载故障诊断系统就成为电动客车的重要组成部分。
3.电动客车的发展虽然已有了很大的进步,但在关键技术开发,尤其是高压负载系统故障诊断方面仍需要取得进一步突破。目前高压系统故障诊断的相关工作一直集中在部件级故障诊断,这些方法普遍用于电动乘用车故障诊断,如驱动电机故障诊断方法包括机理分析、信号分析和智能故障诊断,采用基于残差的方法对功率变换器进行故障诊断,采用故障树分析技术对充电装置进行故障诊断等。然而,对于电动客车高压负载系统而言,系统级故障诊断和定位比部件级故障诊断更有实用价值,这取决于其应用情况和维修服务系统。首先,作为公共交通系统的关键组成部分,电动客车的故障必须尽快得到解决,以便快速运营,以免给城市交通带来压力,一般来说,为了实现这一目标,采用故障组件快速替换,而不是采用故障组件现场修复,因此电动客车系统级故障诊断与定位尤为重要。
4.针对电动客车系统级故障诊断与定位的研究较少,这为城市客车的智能维修提供了障碍。为解决这一问题,提高电动客车维修效率,提出了一种基于激励响应分析和多域稀疏表达的系统级故障诊断与定位方案。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于多域稀疏表达的电动客车高压负载系统故障诊断方法,以快速准确地诊断出电动客车高压负载系统的故障原因。
6.为达到上述目的,本发明提供如下技术方案:
7.一种基于多域稀疏表达的电动客车高压负载系统故障诊断方法,考虑到电动客车的行驶方案,本发明的故障诊断与定位主要在出发间隔或停车时间内进行诊断,具体包括以下步骤:
8.s1:在进行故障诊断前,对电动客车进行多次测试,获取其正常模式或不同故障模式下由标准激励信号引起的电流响应信号,将响应信号定义为标记数据样本,利用标记的数据样本构造时域、频域和几何域下的字典矩阵;
9.s2:故障诊断时,向高压负载系统注入一个标准的激励信号,并收集由激励信号引起的响应电流;分别在时域、频域和几何域上用标记样本稀疏表达电流响应信号,采用批量匹配追踪算法计算出对应的时域稀疏向量、频域稀疏向量和几何域稀疏向量;
10.s3:将时域稀疏向量、频域稀疏向量和几何域稀疏向量融合为联合稀疏向量,再对该联合稀疏向量进行处理,识别测试样本的模式。
11.进一步,在步骤s1中,具体包括:电动客车高压负载系统的故障模式包括:电池加热膜内部短路、驱动电机绕组匝间短路、dc/dc输出端子短路、母线电容性能下降(母线电容减少)以及ptc加热器性能下降(电阻增加);基于电动客车电压平台,将标准激励信号设计为多级跃迁信号,分为三个阶段:第1阶段,时间为0s~0.2s,输出电压0v;第2阶段,时间为0.2s~1s;第3阶段,时间为1s~2s。
12.进一步,在步骤s1中,构造时域、频域和几何域下的字典矩阵:
13.(1)构造时域字典矩阵:根据获取的电流响应信号,直接表示为:
14.d
t
=[d
t1 d
t2 ... d
ti ... d
tp
]n×
pq
[0015]
其中,d
ti
是由i
th
模式的标记样本组成的矩阵,i=1,2,...,p,p表示模式数,q表示从一个模式中收集到的标记样本数,并且:
[0016]dti
=[x
i,1 x
i,2 ... x
i,j ... x
i,q
]
[0017]
其中,x
i,j
是模式i的j
th
标记数据样本,j=1,2,...,q。
[0018]
(2)构造频域字典矩阵:
[0019]
首先将原始信号转换为频谱:由于激励信号第0s~0.2s时输出电压为0v,响应信号在这段时间内的数据点为0,因此不考虑输出电压为0时的采样点,而采用后续的数据点来构造频域字典矩阵,设截断信号中的数据点个数为n,;
[0020]
假设截断信号为x
tr
(n),n=1,2,...,n,频谱为y(k),k=0,1,...,n-1,则:
[0021][0022]
由于采样点x
tr
(n)是实数,因此:
[0023][0024]
频谱是对称的,只有一半频谱有效,因此采用y(k)中的前半段数据点来构造频域字典矩阵,字典中原子的长度为r,得到频域字典矩阵为:
[0025]df
=[d
f1 d
f2 ... d
fi ... d
fp
]r×
pq
[0026]
其中,d
fi
是由i
th
模式的频谱组成的矩阵,i=1,2,...,p,p表示模式数,q表示从一个模式中收集到的标记样本数,:
[0027]dfi
=[y
i,1 y
i,2 ... y
i,j ... y
i,q
],其中y
i,j
是模式i的j
th
标记频谱,j=1,2,...,q。
[0028]
(3)构造几何域字典矩阵:
[0029]
为了提高诊断精度,从响应信号中提取14个几何特征,这些特征包含6个信号特征和8个动态性能指标;从响应信号的前节段(t=0.2s~1s)提取4个指标,从响应信号的后节段(t=1s~2s)提取4个指标;
[0030]
1)前段脉搏强度:psa=x
i,j
|
t=0.2000s
;
[0031]
2)后段脉搏强度:ps
p
=x
i,j
|
t=1.0000s
;
[0032]
3)前段的最小曲率半径:x
i,j
|
t=0.2101s~t=0.2500s
的最小曲率半径,记为mcr;
[0033]
4)前段最小曲率半径位置:最小曲率圆的圆心在t轴上的位置,记为p
mcr
;
[0034]
5)有效反应平均值:
[0035]
6)前段值稳定:
[0036]
7)前段高峰时间:定义前段的峰值为pva=max(x
i,j
|
t=0.2001s~t=0.9999s
),响应信号首先在时间t=t
pva
达到前段的峰值前段的峰值时间为
[0037]
pta=t
pva-0.2000s;
[0038]
8)前段上升时间:在t=t
sva
,t∈(0.2001s,t
pva
)时刻,响应信号首先到达前段的稳定值:
[0039]
那么前段的上升时间为:
[0040]
rta=t
sva-0.2000s;
[0041]
9)前段超调量:
[0042]
10)后段稳定值:
[0043]
11)后段谷时间:将后段的谷值定义为vv
p
=min(x
i,j
|
t=1.0001s~2.0000s
),响应信号在t=1.0001s之后首先在t=t
vvp
时间到达后段谷值:
[0044]
那么后段的谷时间为:
[0045]
vt
p
=t
vvp-1.0000s;
[0046]
12)后段下降时间:在t=t
svp
,t∈(1.0001s,t
vvp
)时刻,响应信号首先达到后段的稳定值:
[0047]
那么后段下降时间为:
[0048]
ft
p
=t
svp-1.0000s;
[0049]
13)后段超调量:
[0050]
14)前段和后段的稳定值差:
[0051]
svd=sv
a-sv
p
;
[0052]
将上述14个几何特征按如下顺序组成几何特征向量:
[0053][0054]
其中g
i,j
是模式i的j
th
标记几何特征向量,j=1,2,...,q,再用这些从不同模式中提取的几何特征向量构造几何域字典矩阵:
[0055]dg
=[d
g1 d
g2 ... d
gi ... d
gp
]
14
×
pq
,
[0056]
其中,d
gi
由从i
th
模式中提取的几何特征向量组成,i=1,2,...,p,p表示模式数,q
表示从一个模式中收集到的标记样本数,
[0057]dgi
=[g
i,1 g
i,2 ... g
i,j ... g
i,q
]。
[0058]
进一步,在步骤s2中,所述用标记样本稀疏表达电流响应信号,在时域、频域以及几何域中,测试样本分别用过完备字典表示,其中过完备字典矩阵为不同模式下标记样本在时域、频域和几何域中构造的字典矩阵;
[0059]
在时域中,直接用时域字典矩阵稀疏表达测试样本,得到测试样本的时域稀疏向量;
[0060]
在频域中,先通过离散傅里叶变换将测试样本变换为电流响应频谱,再用频域字典矩阵稀疏表达测试样本的频谱,得到频域稀疏向量;
[0061]
在几何域中,先从测试样本中提取出几何特征构成几何特征向量,再用几何域字典矩阵稀疏表达测试样本的几何特征向量,得到几何域稀疏向量。
[0062]
进一步,所述稀疏表达具体为:假设测试样本为zk,k=x,y,g,z
x,18000
×1为时域响应信号,z
y,9000
×1为测试样本的频谱,z
g,14
×1为测试样本的几何特征向量;dk,k=x,y,g为过完备字典矩阵,d
x,18000
×
pq
为时域字典矩阵,d
y,9000
×
pq
为频域字典矩阵,d
g,14
×
pg
为几何域字典矩阵;稀疏表达表示为:
[0063]
zk=dk·
θ
k,pq
×1,k=x,y,g
[0064]
其中,θ
k,pq
×1,k=x,y,g为稀疏向量,由批量匹配追踪算法获得。
[0065]
进一步,所述批量匹配追踪算法,具体如下:
[0066]
算法输入:字典矩阵:dk;测试样品:zk;图案数量:p;每批支持向量数n
sv
;迭代次数:n
iter
;
[0067]
算法输出:稀疏向量:θ
k,pq
×1;
[0068]
中间变量:迭代计数器:times=1,2,...,n
iter
;不同向量之间的余弦相似度:product;非零元素在θk中的位置:θk中的非零元素:为测试样本选择的支持向量:m
sv
;残差向量:res;
[0069]
运算过程:
[0070]
a:变量初始化:times=1;最初的θk:θ
k,0
=(0 0 ... 0)
tpq
×1;θk中非零元素的位置索引:θ
k,pos,0
=[ ];初始残差向量:res0=zk;
[0071]
b:计算:计算残差向量res
times-1
与字典矩阵中每个列向量k
col
的余弦相似度,其中k=x,y,g,col=1,2,...,pq:
[0072]
product
col
=(k
colt
·
res
times-1
)/(||k
col
||
·
||res
times-1
||)
[0073]
然后选择product
col
的n
sv
最大值,这些值的位置索引为:
[0074][0075]
位置索引向量θ
k,pos
通过迭代过程进行更新和扩展:
[0076]
θ
k,pos
=θ
k,pos
∪θ
k,pos,times
[0077]
基于位置索引向量,选出对表示测试样本贡献最大的一批支持向量:
[0078][0079]
同时,将字典矩阵dk中列索引为θ
k,pos
的列向量设置为空向量:
[0080][0081]
之后用最小二乘法计算θk中的元素对应于m
sv,times
中的支持向量:
[0082]
θ
k,element,times
=(m
sv,timest
·msv,times
)-1
·msv,timest
·
zk[0083]
再计算新的残差向量res
times
:
[0084]
res
times
=z
k-m
sv,times
·
θ
element,times
[0085]
c:迭代:将上述b过程执行n
iter
次,得到θk中的非零元素θ
k,element
及其位置θ
k,pos
,稀疏向量为:
[0086]
θ
k,pq
×1:θ
k,θk,pos
=θk(θ
k,pos
)=θ
k,element
。
[0087]
进一步,在步骤s3中,首先融合时域稀疏向量θ
x,pq
×1、频域稀疏向量θ
y,pq
×1和几何域稀疏向量θ
g,pq
×1:
[0088][0089]
其中,θ
pq
×1是融合的稀疏向量,θ
ij
是i
th
模式下j
th
测试样本的稀疏向量,i=1,2,...,p,j=1,2,...,q,p表示模式数,q表示从一个模式中收集到的标记样本数;
[0090]
从θ
pq
×1中提取一个权重分布向量,记为w:
[0091]wp
×1=(w
1 w
2 ... w
p
)
t
[0092]
其中,wi是与i
th
模式对应的融合稀疏向量中的元素的总和:
[0093][0094]
与测试样本具有相同模式的标记样本向量对稀疏表达的贡献最大,因此,权重分布向量w中最大元素的索引即为测试样本的模式或故障模式:
[0095]
pattern=i,s.t.max(wi),i=1,2,...,p。
[0096]
本发明的有益效果在于:本发明能及时发现和消除电动客车高压系统的潜在风险,避免因高压系统故障而引起安全事故,同时避免给公共安全和个人安全带来严重影响。本发明具有准确率高、实用性强和部署简单方便等特点,对于工程应用具有重要意义。
[0097]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0098]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0099]
图1为高压负载故障诊断方案;
[0100]
图2为高压负载故障诊断系统;
[0101]
图3为稀疏向量融合与模式识别;
[0102]
图4为基于多域稀疏表达的数据分析;
[0103]
图5为响应信号的几何特征;
[0104]
图6为批量匹配追踪算法的稀疏表达;
[0105]
图7为稀疏向量的模式识别过程。
具体实施方式
[0106]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0107]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0108]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0109]
请参阅图1~图7,为一种基于多域稀疏表达的电动客车高压负载系统故障诊断方法。电动客车高压系统由动力电池系统和高压负载系统组成。动力电池系统由相对成熟的电池管理系统(bms)管理和保护,本发明的诊断主要集中在高压负载系统。高压负载系统由驱动电机、电池电加热膜、电除霜器、转向电机、空压机、dc/dc、母线电容和ptc加热器等组成。在电动客车的高电压负载中,根据历史维护数据,发现电加热膜、驱动电机、dc/dc、母线电容、ptc加热器等负载故障率较高。同时,这些负载可在快速维修服务站快速更换。因此,本发明旨在快速准确地诊断出电动客车高压负载系统的故障原因。
[0110]
图1所示为本发明的电动客车高压负载系统故障诊断基本结构。电动客车在断电状态下,在出发间隔或停车期间,向高压负载系统注入一个标准的激励信号,由激励信号引起的响应电流通过高压负载系统。为了收集响应电流信号,电流传感器串联到电路上。然后,利用高速数据采集装置采集这些响应电流信号。
[0111]
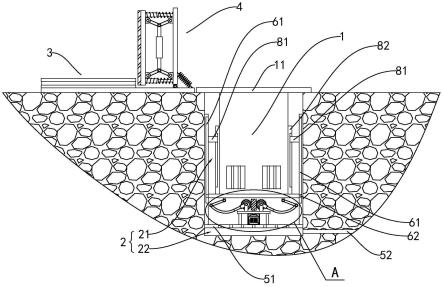
图2所示为激励信号的产生和响应信号的采集:高压负载故障诊断系统与负载供电电路并联,部署在电动客车高压配电单元(pdu)中。电动客车驱动过程中k1、k2开关闭合,k3/k4/k5/k6开关打开;在停车时间内,k1、k2开关打开,k3/k4/k5/k6开关关闭,诊断系统接入高压系统。诊断系统由信号发生器和数据采集模块组成。基于电动客车电压平台,将标准激励信号设计为多级阶跃信号,如表1所示:
[0112]
表1标准激励信号
[0113]
阶段123时间0~0.20.2~11~2电压(v)01000576
[0114]
图3和图4所示为数据处理方法:数据采集模块的采样频率为10ks/s,从而在诊断过程中采集数据点。但由于响应信号的第1-2000个数据点为零,因此不考虑这2000个数据点,而采用第2001-20000个数据点构造时域字典矩阵,则截断信号中的数据点个数为n=18000。随后,利用图3和图4所示的算法对采集到的数据进行分析。
[0115]
假设从一个模式中收集到的标记样本数为q,模式数为p,则时域字典矩阵表示为:
[0116]dt
=[d
t1 d
t2 ... d
ti ... d
tp
]n×
pq
[0117]
其中,d
ti
是由i
th
模式的标记样本组成的矩阵,i=1,2,...,p,并且:
[0118]dti
=[x
i,1 x
i,2 ... x
i,j ... x
i,q
]
[0119]
其中,x
i,j
是模式i的j
th
标记数据样本,j=1,2,...,q。
[0120]
如表2所示,选择了5种故障模式,此外,正常状态也是一种模式,因此,在本发明中,p=6。
[0121]
表2高压负载系统的故障模式
[0122]
故障部件故障模式电池加热膜内部短路驱动电机绕组匝间短路dc/dc输出端子输出端子短路母线电容性能下降(母线电容减少)ptc性能下降(电阻增加)
[0123]
数据转换和特征提取:
[0124]
时频转换:在频域稀疏表达之前,将原始信号变换为频谱。由于响应信号的幅值在0~0.2s为零,所以第1-2000个采样点不进行变换。因此,截断信号中的数据点数是18000。
[0125]
假设截断信号为x
tr
(n),n=1,2,...,n,频谱为y(k),并且k=0,1,...,n-1,这里n=1,2,...,n,那么:
[0126][0127]
考虑到采样点x
tr
(n)是实数:
[0128][0129]
频谱是对称的,因此只有一半的频谱有效,这里用y(k)中的第1-9000个数据点来构造频域字典矩阵,字典中原子的长度是r=9000。
[0130]
因此,频域字典矩阵为:
[0131]df
=[d
f1 d
f2 ... d
fi ... d
fp
]r×
pq
[0132]
其中,d
fi
是频域字典矩阵,由i
th
模式的频谱组成,i=1,2,...,p:
[0133]dfi
=[y
i,1 y
i,2 ... y
i,j ... y
i,q
]
[0134]
这里,y
i,j
是模式i的j
th
标记频谱,j=1,2,...,q。
[0135]
图5所示为响应信号的几何特征提取:为了提高诊断精度,从响应信号中提取了14个几何特征,这些特征包含6个信号特征和8个动态性能指标;从响应信号的前节段(t=0.2s~1s)提取4个指标,从响应信号的后节段(t=1s~2s)提取4个指标。
[0136]
(1)前段脉搏强度:
[0137]
psa=x
i,j
|
t=0.2000s
[0138]
(2)后段脉搏强度:
[0139]
ps
p
=x
i,j
|
t=1.0000s
[0140]
(3)前段的最小曲率半径:
[0141]
x
i,j
|
t=0.2101s~t=0.2500s
的最小曲率半径,记为mcr。
[0142]
(4)前段最小曲率半径位置:
[0143]
圆心(最小曲率圆)在t轴上的位置,记为p
mcr
。
[0144]
(5)有效反应平均值:
[0145][0146]
(6)前段值稳定:
[0147][0148]
(7)前段高峰时间:
[0149]
定义前段的峰值为:
[0150]
pva=max(x
i,jt=0.2001s~0.9999s
)
[0151]
响应信号首先在时间t=t
pva
达到前段的峰值
[0152][0153]
前段的峰值时间为:
[0154]
pta=t
pva-0.2000s
[0155]
(8)前段上升时间:
[0156]
在t=t
sva
,t∈(0.2001s,t
pva
)时刻,响应信号首先达到前段的稳定值:
[0157][0158]
前段的上升时间为:
[0159]
rta=t
sva-0.2000s
[0160]
(9)前段超调量:
[0161][0162]
(10)后段稳定值:
[0163][0164]
(11)后段谷时间:将后段的谷值定义为:
[0165]
vv
p
=min(x
i,j
|
t=1.0001s~2.0000s
)
[0166]
响应信号在t=1.0001s之后首先在t=t
vvp
时间到达后段谷值:
[0167]
[0168]
后段的谷时间为:
[0169]
vt
p
=t
vvp-1.0000s
[0170]
(12)后段下降时间:
[0171]
在t=t
svp
,t∈(1.0001s,t
vvp
)时刻,响应信号首先达到后段的稳定值:
[0172][0173]
后段下降时间为:
[0174]
ft
p
=t
svp-1.0000s
[0175]
(13)后段超调量:
[0176][0177]
(14)前段和后段的稳定值差:
[0178]
svd=sv
a-sv
p
[0179]
几何特征向量由这14个特征按如下顺序组成,g
i,j
是模式i的j
th
标记几何特征向量:
[0180][0181]
然后,用这些从不同模式中提取的几何特征向量构造几何域字典矩阵:
[0182]dg
=[d
g1 d
g2 ... d
gi ... d
gp
]
14
×
pq
[0183]
其中,d
gi
由从i
th
模式中提取的几何特征向量组成,i=1,2,...,p:
[0184]dgi
=[g
i,1 g
i,2 ... g
i,j ... g
i,q
]
[0185]
图6所示为基于批量匹配追踪算法的稀疏表达:在时域、频域和几何域,测试样本分别用过完备字典表示,过完备字典由标记样本在时域、频域及几何域下的字典矩阵组成。
[0186]
假设测试样本为zk,k=x,y,g,z
x,18000
×1为时域响应信号,z
y,9000
×1为测试样本的频谱,z
g,14
×1为测试样本的几何特征向量。dk,k=x,y,g为过完备字典,d
x,18000
×
pq
为时域字典矩阵,d
y,9000
×
pq
为频域字典矩阵,d
g,14
×
pg
为几何域字典矩阵。然后,稀疏表达表示为:
[0187]
zk=dk·
θ
k,pq
×1,k=x,y,g
[0188]
其中,θ
k,pq
×1,k=x,y,g为稀疏向量,未知且待确定。在本发明中,θk是通过批量匹配追踪算法获得的:
[0189]
输入:
[0190]
字典矩阵:dk;
[0191]
测试样品:zk;
[0192]
图案数量:p;
[0193]
每批支持向量数:n
sv
;;
[0194]
迭代次数:n
iter
;
[0195]
输出:
[0196]
稀疏向量:θ
k,pq
×1;
[0197]
中间变量:
[0198]
迭代计数器:times=1,2,...,n
iter
;
[0199]
不同向量之间的余弦相似度:product;
[0200]
非零元素在θk中的位置:
[0201]
θk中的非零元素:
[0202]
为测试样本选择的支持向量:m
sv
;
[0203]
残差向量:res;
[0204]
程序:
[0205]
a.变量初始化:
[0206]
迭代计数器:times=1;
[0207]
最初的θk:θ
k,0
=(0 0 ... 0)
tpq
×1;
[0208]
θk中非零元素的位置索引:θ
k,pos,0
=[ ];
[0209]
初始残差向量:res0=zk;
[0210]
b.计算
[0211]
计算残差向量res
times-1
与字典矩阵k
col
中每个列向量的余弦相似度,其中k=x,y,g,col=1,2,...,pq:
[0212]
product
col
=(k
colt
·
res
times-1
)/(||k
col
||
·
||res
times-1
||)
[0213]
然后,选择product
col
的n
sv
最大值,这些值的位置索引为:
[0214][0215]
位置索引向量通过迭代过程进行更新和扩展:
[0216]
θ
k,pos
=θ
k,pos
∪θ
k,pos,times
[0217]
基于位置索引向量,选出对表示测试样本贡献最大的一批支持向量:
[0218][0219]
同时,将字典矩阵dk中列索引为的列向量设置为空向量:
[0220][0221]
之后,用最小二乘法计算中的元素对应于m
sv,times
中的支持向量:
[0222][0223]
然后,计算新的残差向量res
times
:
[0224][0225]
c.迭代
[0226]
等式到等式中描述的过程执行n
iter
次。
[0227]
最后得到中的非零元素及其位置稀疏向量为:
[0228]
[0229]
图7所示为模式识别与故障诊断:
[0230]
首先融合时域稀疏向量频域稀疏向量和几何域稀疏向量
[0231][0232]
这里,是融合的稀疏向量。然后,从融合后的向量中提取一个权重分布向量,该权重分布向量记为w:
[0233]wp
×1=(w
1 w2ꢀ…ꢀwp
)
t
[0234]
其中,wi是与i
th
模式对应的融合稀疏向量中元素的总和:
[0235][0236]
基于稀疏表达理论,与测试样本具有相同模式的标记样本向量对稀疏表达的贡献最大,因此,权重分布向量w中最大元素的索引是测试的模式或(故障)模式样本:
[0237]
pattern=i,s.t.max(wi),i=1,2,
…
,p。
[0238]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。