1.本实用新型涉及管带机械设备技术领域,特别涉及一种管带机及其巡检装置。
背景技术:
2.目前,管带机在电力、冶金、港口等行业得到了较广泛应用,在管带机线路上所占比例最大的是成圆段。成圆段截面通常由6个托辊围绕成正多边形,胶带在正多边形内部被强制卷曲成圆管状而运行。在运行过程中,有可能出现托辊损坏、胶带扭转等问题,需要及时发现并处理。
3.管带机的巡视工作大部分都依靠人工,进行定时检查、驻点值守,但是由于现场环境复杂、空间狭小,巡检的线路距离长,对人工巡视造成非常大的阻碍和干扰,而且人工巡检容易受到个人经验和主观意识的影响,受到监测手段、数据记录、数据分析方面的制约,通常花费大量人力却不能得到有效的数据结果。巡检效率低,设备故障经常不能及时发现,有可能导致严重后果。
技术实现要素:
4.本实用新型的目的为提供一种占据空间小且使用安全性高的巡检机构以及具有该巡检机构的管带机。
5.本实用新型提供了一种管带机的巡检机构,包括能够置于所述输送带的成圆管段内部且随所述输送带运动的机体,所述机体安装有检测部件,所述检测部件至少能够获取处于承载的所述成圆管段传输时的工况参数;
6.所述输送带的成圆管段的两端部均设置有抓取机构,分别用于将所述机体自所述输送带的承载出口转移至所述输送带的回程入口、将所述机体自所述输送带的回程出口转移至所述输送带的承载入口。
7.本实用新型所提供的巡检机构以输送带为运动载体,不用设置专门的机体运动轨道,消除了现有技术巡检设备行走空间与人员走道空间冲突的缺陷,并且巡检机构的行走动力来源于输送带,无需设置专门的动力部件,不受巡检长度限制,且消除现有技术电力驱动爆炸的缺陷,这样本实用新型的管带机能够不改变管带机桁架结构,大大降低设计难度,节省建设成本。
8.本实用新型所提供的巡检机构通过抓取机构实现了机体在承载段两端的循环移动,实现自动化设置。
9.可选的,所述检测部件包括振动传感器,用于检测所述输送带的振动参数;
10.或者/和,所述检测部件包括温度传感器,用于检测所述机体所处位置的成圆管段内部的温度。
11.可选的,所述检测部件还包括图像检测部件,用于获取所述成圆管段内部光线信号以判断搭接边的扭转角度。
12.可选的,还包括姿态调节装置,用于调节所述机体的姿态以获取所述图像检测部
件满足观测需求的视野范围。
13.可选的,所述姿态调节装置包括第一驱动部件和若干支腿,各所述支腿的一端转动连接于所述机体,所述第一驱动部件用于驱动所述支腿另一端相对其与所述机体的转动点转动,并且所述第一驱动部件内置于所述机体内部。
14.可选的,所述若干支腿形成两个支腿组件,分别设置于所述机体的两端部,每一个所述支腿组件包括至少两根所述支腿,同一所述支腿组件的各支腿沿所述机体周向布置。
15.可选的,所述机体包括封闭腔,所述封闭腔的局部腔体壁为透明结构,所述检测部件安装于所述封闭腔。
16.可选的,所述抓取机构包括第二驱动部件、机械臂、抓手和轨道;所述轨道设置于所述管带机的机架,所述机械臂一端连接于所述第二驱动部件,所述机械臂的自由端连接有所述抓手,所述第二驱动部件能够驱动所述机械臂沿所述轨道往复运动于所述承载出口和所述回程入口,或者第二驱动部件能够驱动所述机械臂沿所述轨道往复运动于所述承载入口和所述回程出口。
17.可选的,还包括支架,所述轨道设置于所述支架;还包括第三驱动部件,用于驱动所述轨道的支架沿所述输送带长度方向往复运动;
18.或者/和,所述第二驱动部件为伸缩缸或者机械臂,所述机械臂包括至少两节节臂,相邻所述节臂之间能够相对转动;
19.或者/和,所述轨道为环形段。
20.此外,本实用新型还提供了一种管带机,包括机架和输送带,所述机架上设置有多组间隔布置的辊轮单元,每一个所述辊轮单元包括至少两个周向布置的辊轮,每一所述辊轮单元的各辊轮围成所述输送带的卷曲空间;还包括上述任一项所述的管带机的巡检机构。
21.本实用新型的管带机包括上述巡检机构,故该管带机也具有巡检机构的上述技术效果。
附图说明
22.图1为本实用新型一种实施例中管带机部分结构的俯视结构示意图;
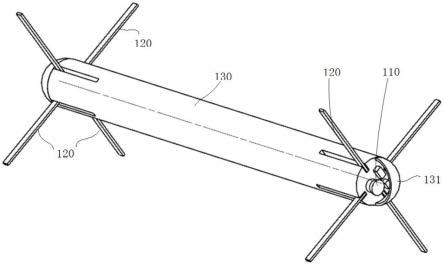
23.图2为本实用新型一种实施例中巡检机构的结构示意图;
24.图3为图2所示巡检机构处于另一姿态的结构示意图;
25.图4为管带机局部位置视图;
26.图5为本实用新型一种实施例中管带机成圆管段的局部示意图。
27.其中,图1至图5中:
28.100巡检机构、110检测部件、120支腿、130机体、131透明结构、210伸缩缸、220轨道、230支架、400输送带、501辊轮、502机架、500上辊轮单元、500’下辊轮单元。
具体实施方式
29.针对背景技术提出的人工巡检工作量大的问题,本文进行了大量调研,调研发现当前也有设置专门机械设备进行巡检的情况,针对当前巡检机械设备本文进行了深入研究,研究发现当前管带机的巡检设备主要存在以下不足:
30.一、巡检设备目前主要针对普通带式输送机进行开发,并没有针对管带机的特点进行研究。巡检设备行走空间与人员走道空间冲突。
31.二、随着管带机输送线路距离增加,导致巡检设备的巡航能力不足,无法适应长距离管带机应用的实际需要。
32.三、机器人普遍采用电力驱动的行走装置,在具有粉尘爆炸危险性的环境中,电力系统对防爆性能不利。
33.四、需要为机器人铺设专用轨道,改变了现有管带机桁架结构,提高设计难度,增加建设成本。
34.针对当前巡检设备存在的上述缺陷,本文进行了深入研究,提出了一种至少能够解决上述缺陷之一的技术方案。
35.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和具体实施例对本实用新型作进一步的详细说明。
36.请参考图1至图5,图1为本实用新型一种实施例中管带机部分结构的俯视结构示意图;图2为本实用新型一种实施例中巡检机构的结构示意图;图3为图2所示巡检机构处于另一姿态的结构示意图;
37.图4为管带机局部位置视图;图5为本实用新型一种实施例中管带机成圆管段的局部示意图。
38.本实用新型提供了一种巡检机构100,用于管带机。管带机主要包括机架502和输送带400,机架502上设置有多组间隔布置的辊轮单元,每一个所述辊轮单元包括至少两个周向布置的辊轮,每一所述辊轮单元的各辊轮501围成输送带400的卷曲空间。当前辊轮单元通常设置六个辊轮501,六个辊轮围成六边形的卷曲空间。在辊轮单元的作用下,输送带400能够卷曲成圆管,本文将输送带400卷曲形成的圆管定义为成圆管段。
39.通常机架502上设置有上下两排辊轮单元,本文分别定义为上辊轮单元500和下辊轮单元500’,其中每一排具有至少两个辊轮单元,位于上方的各辊轮单元形成载料区段,即承载段,位于下方的各辊轮单元形成回程段。输送带400在上下两排辊轮单元作用下均可以卷曲成圆管。通常卷曲直径大致相同。
40.根据使用时输送带400各部分所处位置的不同,一根输送带400可以大致分为两部分:承载部分和回程部分,其中承载部件是指承载有物料的区段,物料在承载入口被装载至输送带400的承载部件,然后在输送作用力的作用下,承载有物料的输送带400先传送到辊轮单元布置区域,输送带400被卷曲形成圆管,经过辊轮单元后,输送带400舒展开,在卸料口完成卸料,然后在输送作用力的作用下,输送带400进入回程部分,由卸料口重新回到载料口。
41.输送带400通过至少两个输送轮支撑传动,两个输送轮至少一者通过动力部件驱动转动,其余输送轮可以为从动轮。当然各输送轮也可以同时为动力轮。
42.本实用新型中的巡检机构100包括能够置于输送带400成圆管段内部且随输送带400运动的机体130,也就是说,巡检机构100的机体130能够放置于输送带400卷曲形成圆管内部。
43.本实用新型的机体130安装有检测部件110,检测部件110至少能够获取成圆管段传输时的工况参数。这样根据检测部件110所检测的成圆管段传输时的工况参数可以间接
获取驱动其动作的机架502上不同位置辊轮的工作情况或成圆管段自身姿态,作为判断辊轮或/和成圆管段是否正常工作的依据。
44.本实用新型的巡检机构100输送带400的成圆管段的两端均设置有抓取机构,分别用于将机体130自输送带400的承载出口转移至输送带400的回程入口、将机体130自输送带400的回程出口转移至输送带400的承载入口。
45.也就是说,抓取机构能够在承载部分和回程部分的相应端部之间转移机体130。
46.当本实用新型所提供的巡检机构100使用时,将机体130放置于输送带400的承载入口位置,这样机体130随输送带400与其上的物料一起运动,并且在辊轮的作用下被包裹于圆管内部,在随输送带400运动过程中,机体130上安装的检测部件110能够获取其所处位置的成圆管段的工况参数,根据检测部件110所检测的工况参数进而获得该处辊轮工作状况或者成圆管段的姿态,操作人员能够了解管带机主要部件的工作状况。
47.本实用新型所提供的巡检机构100以输送带400为运动载体,不用设置专门的机体130运动轨道220,消除了现有技术巡检设备行走空间与人员走道空间冲突的缺陷,并且巡检机构100的行走动力来源于输送带400,无需设置专门的动力部件,不受巡检长度限制,且消除现有技术电力驱动爆炸的缺陷,这样本实用新型的管带机能够不改变管带机桁架结构,大大降低设计难度,节省建设成本。
48.本实用新型所提供的巡检机构100通过抓取机构实现了机体130在承载段两端的循环移动,实现自动化设置。
49.上述各实施例中,检测部件110可以包括振动传感器,用于检测输送带400的振动参数;通过检测输送带400当前位置的振动参数可以间接知晓输送带400当前位置处辊轮的工作情况,进而判断辊轮是否正常工作。
50.在一种具体实施例中,检测部件110还可以包括温度传感器,用于检测机体130所处位置的成圆管段内部的温度。这样能够侧梁圆管内部的物料温度,从而判断物料是否存在高温燃烧的风险,提高物料运输的安全性。
51.上述各实施例中,检测部件110还可以包括图像检测部件110,用于获取成圆管段内部光线信号以判断搭接边的扭转角度。利用图像检测部件110捕捉圆管搭边位置孔隙投射进来的光线,结合重力方向,判断输送带400所形成圆管搭边的方向,进而实现对输送带400扭转角段的判断。
52.为了能够提高图像捕捉质量,本实用新型中的巡检机构100还可以包括姿态调节装置,用于调节机体130的姿态以获取图像检测部件110满足观测需求的视野范围。
53.在一种具体实施例中,姿态调节装置可以包括第一驱动部件和若干支腿120,各支腿120的一端转动连接于机体130,第一驱动部件用于驱动支腿120相对其与机体130的转动点转动,并且第一驱动部件内置于机体130内部。
54.巡检机构100的机体130能够通过支腿120支撑于物料上,上述实施例中通过第一驱动部件可以调节支腿120支撑高度,进而实现图像检测部件110高度及角度的调节。这样在图像检测部件110拍摄方向有物料遮挡时,第一驱动部件可以驱动支腿120动作,以绕开遮挡物料,获得可靠的图像信息。
55.上述各实施例中,机体130的两端部均可以设置有一个支腿120组件,每一个支腿120组件包括至少两根支腿120,同一支腿120组件的各支腿120沿机体130周向布置。支腿
120沿周向布置,这样可以无需考虑机体130的放置方向,提高使用灵活性。
56.上述各实施例中,机体130可以包括封闭腔,封闭腔的局部腔体壁为透明结构131,检测部件110安装于封闭腔。检测部件110密封安装于封闭腔内部,避免外部物料影响其使用寿命。封闭腔至少在使用时密封,在进行检修时可以打开,提高维修方便性。
57.上述各实施例中巡检机构100的承载出口和承载入口均设置有抓取机构,抓取机构包括第二驱动部件、机械臂、抓手和轨道220;轨道220设置于机架502,机械臂一端连接于第二驱动部件,机械臂的自由端连接有抓手,抓手能够抓取或释放机体130。第二驱动部件能够驱动机械臂沿轨道220往复运动于承载出口和输送带400的回程入口,或者第二驱动部件能够驱动机械臂沿轨道220往复运动于承载入口和输送带400的回程出口。
58.该实施例中第二驱动部件驱动机械臂沿轨道220运动,运动稳定性比较高。具体地,抓手的抓取可以根据传感器发送的信号来动作,即传感器检测输送带400上机体130到达预定位置,则控制机械臂和抓手动作以抓取机体130,然后在第二驱动部件的驱动下,机械臂带动抓手由第一位置(承载出口或回程出口)移动至第二位置(回程入口或承载入口),将机体130放置于输送带400上。
59.上述实施例中的巡检机构100还可以包括支架230,轨道220设置于支架230;还包括第三驱动部件,用于驱动轨道220的支架230沿输送带400长度方向往复运动;
60.上述各实施例中,第二驱动部件可以为伸缩缸210或者机械臂,机械臂包括至少两节节臂,相邻节臂之间能够相对转动。
61.此外,本实用新型还提供了一种管带机,其还包括上述任一实施例的管带机的巡检机构100。
62.本实用新型的管带机包括上述巡检机构100,故该管带机也具有巡检机构100的上述技术效果。
63.关于管带机的其他结构请参考现有技术,本文不做赘述。
64.以上对本实用新型所提供的一种管带机及其巡检装置进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
