1.本实用新型涉及一种吊具,具体涉及一种自动化搬运吊具。
背景技术:
2.在食品制造过程中,需要将食品浸入水中进行清洗,一般情况下,食品都会装入到方形带有开口的箱体中浸泡如水中进行清洗,由于需要将箱体浸入水中,工作环境水汽过大,会对传统的丝杆传动机构造成腐蚀,同时由于各个箱体的形状会产生偏差,对箱体的精准夹取也成一个问题。
技术实现要素:
3.为解决上述技术问题,本实用新型的目的是提供一种能够自动化实现搬运的吊具。
4.本实用新型的技术方案如下:
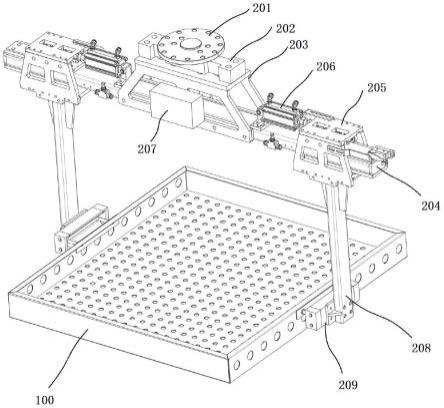
5.一种自动化搬运吊具,其特征在于:包括连接盘(201),所述连接盘(201)底部连接有传感器(202),所述传感器(202)底部连接有吊框(203),所述吊框(203)底部连接有横杆(204);
6.所述横杆(204)的两侧均设置有移动机构,所述移动机构包括滑动设置到所述横杆(204)上的移动框(205),所述横杆(204)上设置有油缸(206),所述油缸(206)的驱动端连接所述移动框(205),所述移动框(205)底部连接有吊臂(208),所述吊臂(208)底部连接有夹取箱(209)。
7.进一步的,所述夹取箱(209)内侧设置有内凹件(2091),所述内凹件(2091)的凹槽为梯形台形状。
8.进一步的,所述内凹件(2091)为聚氨酯制成。
9.进一步的,所述移动框(205)为方形,其包括上部的移动上板(2051),两侧的移动侧板(2052)以及底部的移动下板(2053)。
10.进一步的,所述移动上板(2051)下部两侧设置有第一行走槽(20511),所述横杆(204)上部设置有上安装板(2041),所述上安装板(2041)左右两侧设置有卡合槽(20411),所述移动侧板(2052)的内侧安装有多个第一轴承滚轮(2043),所述第一轴承滚轮(2043)的上部卡合到所述第一行走槽(20511)中下部卡合到所述卡合槽(20411)中;所述移动下板(2053)下部设置有两排第二轴承滚轮(2044),所述移动侧板(2052)的下部设置有第二行走槽(20521),所述第二轴承滚轮(2044)的侧边卡合到所述第二行走槽(20521)中。
11.进一步的,所述移动机构还包括固定设置到所述横杆(204)侧面的压片传感器(2010),所述移动上板(2051)上设置有压片(2011)。
12.借由上述方案,本实用新型至少具有以下优点:
13.本装置大部分组件全部为不锈钢制成,能够防止料盘在清洗时候水引起的腐蚀生锈。
14.本装置移动框采用两组滚轮进行固定限位,保证了结构的稳定性。
15.本装置设置的传感器能够检测有无倾覆风险,设置的压片传感器能够更好卡合把手。
16.本装置设置的内凹件能够适应不同位置的把手(料盘的制造工艺粗糙,把手位置有偏差)。
17.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
18.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某个实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
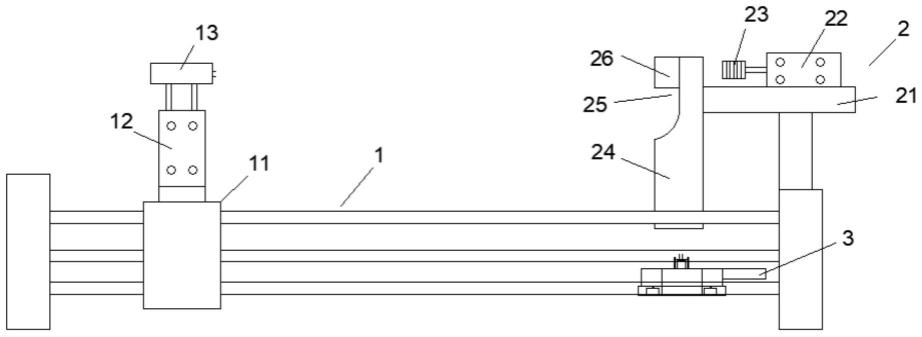
19.图1是本实用新型的结构示意图一;
20.图2是本实用新型的结构示意图二;
21.图3是本实用新型的结构示意图三;
22.图中:
23.100-料盘;
24.201-连接盘;
25.202-传感器;
26.203-吊框;
27.204-横杆;2041-上安装板;20411-卡合槽;2042-下安装板;2043-第一轴承滚轮;2044-第二轴承滚轮;
28.205-移动框;2051-移动上板;20511-第一行走槽;2052-移动侧板;20521-第二行走槽;2053-移动下板;
29.206-油缸;
30.207-电控箱;
31.208-吊臂;
32.209-夹取箱;2091-内凹件。
33.2010-压片传感器;
34.2011-压片。
具体实施方式
35.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
36.参见图1-图3,本实用新型一较佳实施例的一种自动化搬运吊具,包括连接盘201,连接盘201为圆形,其上部一周设置有多个连接孔,该连接盘201用于连接多轴机器人,通过多轴机器人控制其移动。
37.连接盘201底部连接有传感器202,传感器202底部连接有吊框203,吊框203底部连接有横杆204,吊框203和横杆204均为不锈钢制成,传感器202的作用是检测连接盘201和吊框203之间的传感力,如果吊框203和接盘201之间的传感力不均布,则下部吊取的料框100可能会有倾覆的风险。
38.横杆204的两侧均设置有移动机构,移动机构包括滑动设置到横杆204上的移动框205,横杆204上设置有油缸206,油缸206的驱动端连接移动框205。具体移动框205为方形,其包括上部的移动上板2051,两侧的移动侧板2052以及底部的移动下板2053,方形的移动框205结构更加牢固,且移动框也为不锈钢制成。移动上板2051下部两侧设置有第一行走槽20511,横杆204上部设置有上安装板2041,上安装板2041左右两侧设置有卡合槽20411,移动侧板2052的内侧安装有多个第一轴承滚轮2043,第一轴承滚轮2043的上部卡合到第一行走槽20511中下部卡合到卡合槽20411中;移动下板2053下部设置有两排第二轴承滚轮2044,移动侧板2052的下部设置有第二行走槽20521,第二轴承滚轮2044的侧边卡合到第二行走槽20521中。通过两组滚轮的设置,能够使得移动框相对横杆204的连接更加牢固,相比较于传统丝杆或者直线模组的驱动,能够承受下部的形变力更大。
39.移动框205底部连接有吊臂208,吊臂208底部连接有夹取箱209,吊臂208也为不锈钢制成,夹取箱209内侧设置有内凹件2091,内凹件2091的凹槽为梯形台形状,内凹件2091为聚氨酯制成。
40.移动机构还包括固定设置到横杆204侧面的压片传感器2010,移动上板2051上设置有压片2011,该压片传感器2010压片2011的行程更长,能够实现对料盘100更加牢固的夹紧。
41.本装置的技术原理如下:
42.本装置所需要的吊取的料盘100,两侧设置吊取用的把手,同时料盘100上设置有多个通孔。
43.本装置通过两端的油缸驱动移动框的移动,从而在机器人的配合下能够移动到料盘的两侧,两端的夹取箱能够移动到把手的两侧,在油缸的作用下,把手会进入到内凹件中,同时压片能够给压片传感器进行反馈,由于压片的行程较长,油缸能够将内凹件继续移动直至压紧把手,以实现对料盘的夹取。
44.移动框通过上部的两组第一轴承滚轮和下部的两组第二轴承滚轮进行卡死移动,保证了移动框的稳定性。
45.本装置具有如下优点:
46.本装置大部分组件全部为不锈钢制成,能够防止料盘在清洗时候水引起的腐蚀生锈。
47.本装置移动框采用两组滚轮进行固定限位,保证了结构的稳定性。
48.本装置设置的传感器能够检测有无倾覆风险,设置的压片传感器能够更好卡合把手。
49.本装置设置的内凹件能够适应不同位置的把手(料盘的制造工艺粗糙,把手位置有偏差)。
50.以上所述仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做
出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。