技术特征:
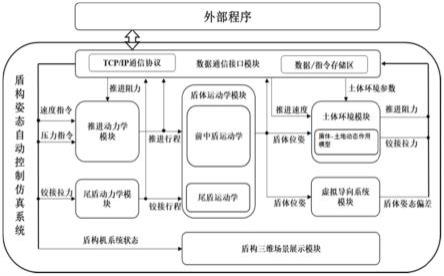
1.一种盾构机姿态自动控制仿真系统,其特征在于,包括:数字通信接口模块、推进动力学模块、盾体运动学模块、尾盾动力学模块、基于盾体-土体动态作用模型的土体环境模块、虚拟导向系统模块以及盾构三维场景展示模块;其中,数字通信接口模块分别与推进动力学模块、尾盾动力学模块、盾体运动学模块、基于盾体-土体动态作用模型的土体环境模块、虚拟导向系统模块以及盾构三维场景展示模块连接;用于接收并存储推进动力学模块、尾盾动力学模块、盾体运动学模块、基于盾体-土体动态作用模型的土体环境模块、虚拟导向系统模块的输出数据;并为各模块提供基础数据支撑;推进动力学模块与盾体运动学模块连接;用于根据数字通信接口模块传输的数据计算盾构机油缸的推进行程,并将推进行程传输到盾体运动学模块;尾盾动力学模块与盾体运动学模块连接;用于接收数字通信接口模块传输数据,并根据传输数据计算铰链行程;并将铰链行程传输到盾体运动学模块;盾体运动学模块与基于盾体-土体动态作用模型的土体环境模块、虚拟导向系统模块连接;用于接收推进行程与铰链行程,并根据推进行程与铰链行程计算盾体实时位姿,并将盾体实时位姿传输给基于盾体-土体动态作用模型的土体环境模块与虚拟导向系统模块;基于盾体-土体动态作用模型的土体环境模块,用于根据盾体实时位姿计算土体环境对推进油缸的推进阻力以及铰接拉力;虚拟导向系统模块,用于根据盾体实时位姿计算盾体姿态偏差;盾构三维场景展示模块,用于根据数字通信接口模块的输出参数,进行三维建模,并对盾构机运动过程进行可视化展示。2.根据权利要求1所述的盾构机姿态自动控制仿真系统,其特征在于,推进动力学模块具体为:接收数字通信接口模块传输的压力指令、速度指令及推进阻力,利用推进动力学方程计算盾构机油缸的推进行程,并将推进行程传输到盾体运动学模块;其推进动力学方程表示为:其中,m
c
为活塞盾体中质量矩阵,b
c
为盾体与土体负载之间的粘性阻尼系数,k
c
为活塞盾体中负载的刚度系数,x
c
为盾构机油缸的实际行程,即为盾构机油缸的推进行程,f
l
为推进阻力,a
c
为盾构机油缸中各分区总的油缸横截面,p
c
为盾构机油缸的油压。3.根据权利要求1所述的盾构机姿态自动控制仿真系统,其特征在于,尾盾动力学模块具体为:接收数字通信接口模块传输的铰链状态输入信号及盾尾拉力,并结合尾盾动力学模型计算实时铰链行程;并将铰链行程传输到盾体运动学模块;其中,尾盾动力学模型计算式表示为:
铰接油缸为释放或者拖拉模式时其中,x
j
为铰接油缸的行程,f
sj
为铰接油缸的拉力,m
j
为盾尾等效到铰接油缸的等效质量矩阵,b
j
为铰接油缸的阻尼系数,k
j
为铰接油缸的弹簧系数,f
e
为盾尾拉力。4.根据权利要求1所述的盾构机姿态自动控制仿真系统,其特征在于,盾体运动学模块具体:包括前中盾运动学子模块与尾盾运动学子模块;其中,前中盾运动学子模块,用于根据推进动力学模块输出的盾构机油缸的推进行程计算前中盾实时位姿;尾盾运动学子模块,用于根据尾盾动力学模块输出的实时铰链行程计算尾盾在城市坐标系下的实时位姿。5.根据权利要求4所述的盾构机姿态自动控制仿真系统,其特征在于,前中盾运动学子模块具体包括:盾体刀盘中心位置向量计算单元,用于根据推进动力学模块输出的盾构机油缸的推进行程计算当前环号对应的管片坐标系盾体刀盘中心位置向量,其计算式表示为:其中,
bn
p
c
为当前环号对应的管片坐标系盾体刀盘中心位置向量,h为前中盾盾体的长度,为上下左右四组推进油缸的平均行程,θ、ψ分别为盾体相对于当前环号对应的管片坐标系的水平偏转角和垂直偏转角,sin(.)为正弦函数,cos(.)为余弦函数;位移向量计算单元,用于根据当前环境坐标系下盾体刀盘中心位置向量计算刀盘中心在城市坐标系下的位移向量,其计算式表示为:其中,
w
p
c
为刀盘中心在城市坐标系下的位移向量,为当前环境坐标系相对于城市坐标系的旋转矩阵,
w
p
bn
为当前环号对应的管片坐标系原点在城市坐标系位置向量;第一旋转参数计算单元,用于计算盾体相对于城市坐标系的旋转参数,其计算式表示为:其中,为盾体相对于城市坐标系的旋转参数,为当前环号对应的管片坐标系下相对于城市坐标系的旋转矩阵,为盾体相对于当前环号对应的管片坐标系下实时姿态;
旋转四元数计算单元,用于根据旋转参数构建盾体相对于城市坐标系的旋转四元数;前中盾实时位姿计算单元,用于根据旋转四元数与位移向量计算前中盾实时位姿,其计算式表示为:其中,p
f
为前中盾实时位姿。6.根据权利要求4所述的盾构机姿态自动控制仿真系统,其特征在于,尾盾运动学子模块具体包括:第一位置向量计算单元,用于计算盾尾在前中盾坐标系下的位置向量;第二位置向量计算单元,用于根据盾尾在前中盾坐标系下的位置向量计算盾尾中心相对于城市坐标系的位置向量,其计算式表示为:其中,
w
p
e
为盾尾中心相对于城市坐标系的位置向量,
w
p
c
为刀盘中心在城市坐标系下的位移向量,为前中盾相对于城市坐标系的旋转矩阵,
c
p
e
为盾尾在前中盾坐标系下的位置向量;实时位姿计算单元,用于计算尾盾相对于前中盾坐标系的实时位姿;第二旋转参数计算单元,用于根据尾盾相对于前中盾坐标系的实时位姿计算尾盾相对于城市坐标系的旋转参数,其计算式表示为:其中,为尾盾相对于城市坐标系的旋转参数;第三旋转参数计算单元,用于根据尾盾相对于城市坐标系的旋转参数计算城市坐标系到盾尾坐标系的旋转参数;尾盾实时位姿计算单元,用于根据城市坐标系到盾尾坐标系的旋转参数与盾尾中心相对于城市坐标系的位置向量计算尾盾在城市坐标系下的实时位姿,其计算式表示为:其中,p
e
为尾盾在城市坐标系下的实时位姿。7.根据权利要求1所述的盾构机姿态自动控制仿真系统,其特征在于,基于盾体-土体动态作用模型的土体环境模块具体包括:铰链拉力计算子模块,用于根据盾体运动学模块输出的盾体实时位姿结合盾体-土体动态作用模型计算铰接拉力;推进阻力计算子模块,用于根据盾体运动学模块输出的盾体实时位姿结合盾体-土体动态作用模型计算推进阻力。
8.根据权利要求7所述的盾构机姿态自动控制仿真系统,其特征在于,推进阻力计算子模块具体包括:刀盘中心历史位置轨迹计算单元,用于构建刀盘中心历史轨迹的插值函数,并结合历史盾体实时位姿计算刀盘行进轨迹点,得到前中盾坐标系下刀盘中心历史位置轨迹,其中前中盾坐标系下刀盘中心历史位置轨迹的计算式表示为:其中,
c
x
ct
(s)为前中盾坐标系下刀盘历史位置轨迹,x
ct
(s)为插值后的刀盘位置函数,为盾体相对于世界坐标系的旋转矩阵,(.)-1
为矩阵求逆运算函数;土体压缩量计算单元,用于根据前中盾坐标系下刀盘中心历史位置轨迹计算盾体里程处对土体压缩量,其中盾体里程处对土体的压缩量的计算式表示为:其中,z(s)为盾体里程s处对土体的压缩量,z1(s)为水平方向上土体压缩量,z2(s)为垂直方向上土体压缩量,
c
x
ct
(s),
c
y
ct
(s)分别为前中盾坐标系下历史位置轨迹
c
x
ct
(s)在水平方向与垂直方向上坐标值,r为前中盾的外壳半径,sgn(.)为阶跃函数,arccos(.)为反余弦函数;压缩变化量计算单元,用于根据盾体里程对土体的压缩量计算压缩变化量,计算式表示为:其中,为压缩变化量;盾体-土地动态系统单元,用于利用温克尔弹性地基原理,根据压缩量及压缩变化量计算推进过程中受到侧边土体抗力产生的力矩,得到侧边抗力力矩,其计算式表示为:其中,τ
sr
为推进过程中受到侧边土体抗力产生的力矩,作为侧边抗力力矩,c(.)为单位转换矩阵,k为地基基床系数矩阵,d为盾构机挤压土体所受到的粘滞系数;s0为中盾尾部中心的里程,s
c
为刀盘中心的里程;l(s)为前中盾上里程为s的各个受力点相对于等效旋转中心的力臂;重力扭矩计算单元,用于根据预设条件计算重力扭矩,其计算式表示为:τ
g
=g
s
·
l
g
其中,τ
g
为重力扭矩,g
s
为前中盾与刀盘等效的重力中心,l
g
为盾体重心相对于转动中
心的力臂;等效阻力计算单元,用于根据重力扭矩与侧边抗力力矩构建第一扭矩平衡方程,得到总环境扭矩对各推进油缸的等效阻力,其第一扭矩平衡方程表示为:其中,f
et1,i
为盾体所受阻力矩折算到第i组推进油缸上面的阻力值,作为总环境扭矩对推进油缸的等效阻力,l
et1,i
为第i组推进油缸对应的力臂,n为推进油缸的分组个数;盾体轴向所受阻力计算单元,用于计算盾体轴向所受阻力,其计算式表示为:f
ss
=f
e1
f
e2
f
e3
f
e2
=∫δsp
r
ds/n其中,f
ss
为盾体轴向所受阻力,f
e1
为推进过程中受到的摩擦力,μ为摩擦系数,f1为盾体所受到水土压等压力的总和,f
e2
为静止水土压对各组油缸产生的轴向作用力,δs为刀盘面面积微元,p
r
为刀盘面所受水土压的压强函数,f
e3
代表在盾体推进过程到盘面所受前方土体产生的动态阻力,v
t
为推进油缸的推进速度,α为阻力系数;推进阻力计算单元,用于利用盾体轴向所受阻力及总环境扭矩对各推进油缸的等效阻力,计算推进阻力,其计算式表示为:f
et
=f
ss
f
et1
其中,f
et
为推进阻力,f
et1
为总环境扭矩对各推进油缸的等效阻力。9.根据权利要求7所述的盾构机姿态自动控制仿真系统,其特征在于,铰链拉力计算子模块具体包括:土体抗力力矩计算单元,用于利用盾体-土地动态作用模型根据盾体运动学模块输出的盾体实时位姿,计算盾尾的土体抗力力矩,其计算式表示为:其中,τ
esr
为盾尾的土体抗力力矩,s
e1
为盾尾尾部中点里程,s
e2
为盾尾头部中点里程,z
j
(s),分别为盾尾压缩土体量和压缩土体量的变化量,k为地基基床系数矩阵,d为盾构机挤压土体所受到的粘滞系数,max(.)为最值函数;轴向阻力计算单元,用于根据推进油缸的推进速度计算盾尾受到的轴向阻力,其计算式表示为:
其中,f
ess
为盾尾受到的轴向阻力,n为总的油缸分组个数,v
t
为推进油缸的推进速度,μ为摩擦系数,f2为尾盾侧边所受到的水土压力;环境拉力计算单元,用于根据盾尾的土体抗力力矩构建第二扭矩平衡方程,计算各组铰接油缸所受环境拉力,其第二扭矩平衡方程表示为:其中,f
ej1
为尾盾所受力矩折算到各组铰接油缸上面的拉力值,作为各组铰接油缸所受环境拉力,l
ej1
为各组铰接油缸对应的力臂;铰链拉力计算单元,用于根据各组铰接油缸所受环境拉力与轴向阻力计算铰链拉力,其计算式表示为:f
ej
=f
ej1
f
ess
其中,f
ej
为铰链拉力。
技术总结
本发明公开了一种盾构机姿态自动控制仿真系统,通过构建数字通信接口模块、推进动力学模块、盾体运动学模块、尾盾动力学模块、基于盾体-土体动态作用模型的土体环境模块、虚拟导向系统模块以及盾构三维场景展示模块,组建盾构机姿态自动控制仿真系统;本发明构建基于盾体-土体动态作用模型的土体环境模块,并结合各模块间的数据传输合理反映盾构机运动过程盾体所受阻力,阻力矩的情况;并通过数字通信接口模块预留外部的数据/控制接口,通过外部控制信号完善对基于盾构姿态自动控制的仿真测试,为盾构姿态自动控制算法的设计与验证提供了一个低成本,高效率,高可靠性的实现方案,并实时可视化展示盾构机的运动过程。并实时可视化展示盾构机的运动过程。并实时可视化展示盾构机的运动过程。
技术研发人员:黄德青 宋晨健 秦娜 徐进 严一舟
受保护的技术使用者:西南交通大学
技术研发日:2022.03.30
技术公布日:2022/7/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。