1.本实用新型涉及咖啡自动化制作设备技术领域,具体涉及一种带杯叉的咖啡粉勺机械抓手。
背景技术:
2.随着第四次工业革命深入发展,自动化替代劳动力的趋势正在不断增强,机械手臂的发展和应用越来越多,在运用机械手臂代替人工实现手工咖啡的制作过程中,机械手臂要完成咖啡浓缩液的淬取,需要先到磨豆机上接取咖啡粉,然后到布粉机上对咖啡粉进行均匀布粉,再到压粉机上对咖啡粉进行压紧,最后才到咖啡机处进行咖啡淬取,这些制作过程都需要使用到咖啡粉勺。咖啡粉勺作为制作咖啡的一个关键设备,机械手臂如何准确地抓取咖啡粉勺,并使用它在各个生产环节进行运转,将影响到咖啡成品的品质。且现有的机械手臂和咖啡勺不易分离,不便于咖啡勺的更换。
技术实现要素:
3.本实用新型的目的在于提供一种带杯叉的咖啡粉勺机械抓手,以解决背景技术中提到的问题。为实现上述目的,本实用新型提供如下技术方案:一种带杯叉的咖啡粉勺机械抓手,包括机械手臂粉勺抓手座和咖啡粉勺抓手,所述咖啡粉勺抓手可分离连接机械手臂粉勺抓手座,所述机械手臂粉勺抓手座包括抓手连接座,所述抓手连接座通过连接法兰连接机械手臂前端,所述抓手连接座内部开有安装腔,所述安装腔内部安装有电磁铁,所述抓手连接座的下方连接有杯叉;
4.所述咖啡粉勺抓手包括粉勺连接法兰,所述粉勺连接法兰内部固定有磁吸块,所述粉勺连接法兰连接连接管一端,所述连接管的另一端连接咖啡粉勺。
5.优选地,所述抓手连接座上开有定位孔,所述定位孔设有两个,位于电磁铁的两侧,所述定位孔内部安装有导向套,所述磁吸块上安装有导向钉,所述导向钉的位置、结构与导向套对应。
6.优选地,所述抓手连接座的上方开有安装槽,所述安装槽内部安装有接近开关。
7.优选地,所述杯叉包括叉体和连接杆,所述连接杆的一端连接抓手连接座,另一端连接叉体,所述叉体为弧形结构,所述叉体和连接杆为一体结构。
8.本实用新型的技术效果和优点:本装置不同于一般机械手臂所采用的电动、气动和油压方式的抓手,采用了电磁铁吸附原理,这种连接方式的抓手,具有结构简单,功能可靠,抓手切换方便,成本较低,配套设施少。
附图说明
9.图1为本实用新型的机械手臂粉勺抓手座结构示意图;
10.图2为为本实用新型的咖啡粉勺抓手结构示意图;
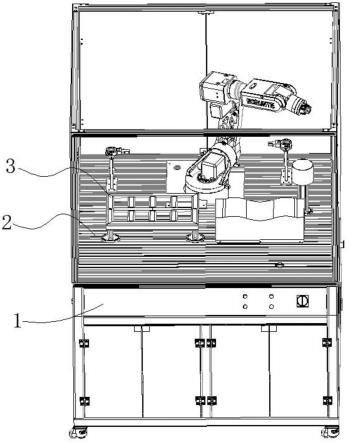
11.图3为本实用新型的工作示意图。
12.图中:1-机械手臂粉勺抓手座,2-咖啡粉勺抓手,3-抓手连接座,4-连接法兰,5-机械手臂,6-安装腔,7-电磁铁,8-杯叉,9-粉勺连接法兰,10-磁吸块,11-连接管,12-咖啡粉勺,13-定位孔,14-导向套,15-导向钉,16-安装槽,17-接近开关,18-叉体,19-连接杆。
具体实施方式
13.为了使本实用新型的实现技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型,在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接或是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以两个元件内部的连通。
14.实施例1
15.如图1和图2所示的一种带杯叉的咖啡粉勺机械抓手,包括机械手臂粉勺抓手座1和咖啡粉勺抓手2,所述咖啡粉勺抓手2可分离连接机械手臂粉勺抓手座1,所述机械手臂粉勺抓手座1包括抓手连接座3,所述抓手连接座3通过连接法兰4连接机械手臂5前端,所述抓手连接座3内部开有安装腔6,所述安装腔6内部安装有电磁铁7,所述抓手连接座3的下方连接有杯叉8;
16.所述咖啡粉勺抓手2包括粉勺连接法兰9,所述粉勺连接法兰9内部固定有磁吸块10,所述粉勺连接法兰9连接连接管11一端,所述连接管11的另一端连接咖啡粉勺12。
17.实施例2
18.如图1和图2所示的一种带杯叉的咖啡粉勺机械抓手,包括机械手臂粉勺抓手座1和咖啡粉勺抓手2,所述咖啡粉勺抓手2可分离连接机械手臂粉勺抓手座1,所述机械手臂粉勺抓手座1包括抓手连接座3,所述抓手连接座3通过连接法兰4连接机械手臂5前端,所述抓手连接座3内部开有安装腔6,所述安装腔6内部安装有电磁铁7,所述抓手连接座3的下方连接有杯叉8;
19.所述咖啡粉勺抓手2包括粉勺连接法兰9,所述粉勺连接法兰9内部固定有磁吸块10,所述粉勺连接法兰9连接连接管11一端,所述连接管11的另一端连接咖啡粉勺12;
20.所述抓手连接座3上开有定位孔13,所述定位孔13设有两个,位于电磁铁7的两侧,所述定位孔13内部安装有导向套14,所述磁吸块7上安装有导向钉15,所述导向钉15的位置、结构与导向套14对应;
21.所述抓手连接座3的上方开有安装槽16,所述安装槽16内部安装有接近开关17;
22.所述杯叉8包括叉体18和连接杆19,所述连接杆19的一端连接抓手连接座3,另一端连接叉体18,所述叉体18为弧形结构,所述叉体18和连接杆19为一体结构。
23.本实用新型工艺流程和工作原理为:如图3所示,根据需要将机械手臂5安装于指定位置,当机械手臂5需要使用该装置时,机械手臂5带动机械手臂粉勺抓手座1到达放置咖啡粉勺抓手2的抓手盒前,接近开关17检测与咖啡粉勺抓手2之间的距离到达设定值,机械手臂粉勺抓手座1上安装的电磁铁7电源导通,使电磁铁7具有磁能,将咖啡粉勺抓手2上的磁吸块10牢牢吸住,同时咖啡粉勺抓手2上的两个导向钉15嵌入机械手臂粉勺抓手座1上的导向套14内部,可保证机械手臂粉勺抓手座1抓取咖啡粉勺抓手2位置的准确,当不需要使用咖啡粉勺时,断开电磁铁7的电源,就可断开咖啡粉勺抓手2和机械手臂粉勺抓手座1的连
接,机械手臂粉勺抓手座1可以通过杯叉8抓取咖啡杯进行后续操作。
24.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种带杯叉的咖啡粉勺机械抓手,包括机械手臂粉勺抓手座和咖啡粉勺抓手,其特征在于:所述咖啡粉勺抓手可分离连接机械手臂粉勺抓手座,所述机械手臂粉勺抓手座包括抓手连接座,所述抓手连接座通过连接法兰连接机械手臂前端,所述抓手连接座内部开有安装腔,所述安装腔内部安装有电磁铁,所述抓手连接座的下方连接有杯叉;所述咖啡粉勺抓手包括粉勺连接法兰,所述粉勺连接法兰内部固定有磁吸块,所述粉勺连接法兰连接连接管一端,所述连接管的另一端连接咖啡粉勺。2.根据权利要求1所述的一种带杯叉的咖啡粉勺机械抓手,其特征在于:所述抓手连接座上开有定位孔,所述定位孔设有两个,位于电磁铁的两侧,所述定位孔内部安装有导向套,所述磁吸块上安装有导向钉,所述导向钉的位置、结构与导向套对应。3.根据权利要求1所述的一种带杯叉的咖啡粉勺机械抓手,其特征在于:所述抓手连接座的上方开有安装槽,所述安装槽内部安装有接近开关。4.根据权利要求1所述的一种带杯叉的咖啡粉勺机械抓手,其特征在于:所述杯叉包括叉体和连接杆,所述连接杆的一端连接抓手连接座,另一端连接叉体,所述叉体为弧形结构,所述叉体和连接杆为一体结构。
技术总结
本实用新型公开了一种带杯叉的咖啡粉勺机械抓手,包括机械手臂粉勺抓手座和咖啡粉勺抓手,所述咖啡粉勺抓手可分离连接机械手臂粉勺抓手座,所述机械手臂粉勺抓手座包括抓手连接座,所述抓手连接座通过连接法兰连接机械手臂前端,所述抓手连接座内部开有安装腔,所述安装腔内部安装有电磁铁,所述抓手连接座的下方连接有杯叉,所述咖啡粉勺抓手包括粉勺连接法兰,所述粉勺连接法兰内部固定有磁吸块,所述粉勺连接法兰连接连接管一端,所述连接管的另一端连接咖啡粉勺。本装置不同于一般机械手臂所采用的电动、气动和油压方式的抓手,采用了电磁铁吸附原理,这种连接方式的抓手,具有结构简单,功能可靠,抓手切换方便,成本较低,配套设施少。配套设施少。配套设施少。
技术研发人员:洪泽煌 秦协帅 周丁盛
受保护的技术使用者:武山(上海)餐饮有限公司
技术研发日:2022.01.21
技术公布日:2022/7/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。