1.本实用新型属于巡检机器人领域,尤其是涉及一种使用工字型吊装轨道的巡检机器人及其清扫机构。
背景技术:
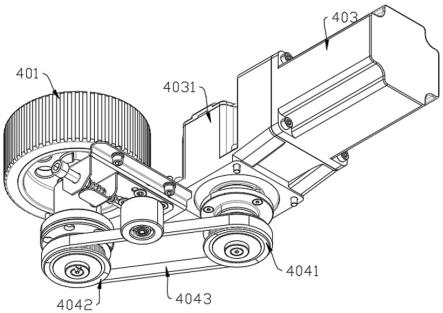
2.采用工字型吊装轨道作为行进轨道的巡检机器人,其行走装置通常要实现驱动、导向、承重等功能,也通常包括安装于承载平台上的驱动机构、承重机构、导向机构。
3.中国专利cn209904754u公开了一种超薄型吊装轨道机器人及其行走装置,其承重机构的承重轮用于与工字轨道的轨道下横梁相抵接,承担整个机器人的重量;驱动轮和张紧轮共同夹住工字轨道的轨道纵梁102,驱动轮在驱动电机驱动下带动行走装置沿工字轨道行进。
4.为确保巡检机器人行进平稳,工字轨道的轨道下横梁101上表面应保持平坦,但在一些场景中,比如对矿场上的带式输送机进行巡视监控的场景,轨道下横梁上表面难免会堆积灰尘和大颗粒固体物,如不能及时清扫,不仅易造成颠簸影响巡视,严重时会导致机器人无法行进甚至脱轨。
技术实现要素:
5.针对在矿场等应用场景中轨道下横梁上表面需及时清扫的问题,本实用新型提出一种清扫机构,具体为:
6.清扫机构,适用于吊装轨道巡检机器人,其包括导向轮、清扫张紧单元、齿轮箱、动力传导单元和扫刷,导向轮同轴固接于第一转轴上,第一转轴与清扫张紧单元的自由端处转动连接,由清扫张紧单元提供维持导向轮抵接工字轨道的弹性推力;齿轮箱固接于清扫张紧单元的自由端处,动力传导单元包括容纳于齿轮箱内的第一、第二、第三和第四锥齿轮以及第二转轴、第三转轴,第二转轴位于第一转轴和第三转轴之间且分别与第一、第三转轴相垂直,齿轮箱分别通过轴承转动支承第二转轴、第三转轴,第一转轴伸入齿轮箱内的轴体同轴固接第一锥齿轮,第二锥齿轮和第三锥齿轮分别同轴固接于第二转轴的两端,第三转轴顶部同轴固接第四锥齿轮,第三转轴下部伸出齿轮箱外且同轴固接扫刷;第一锥齿轮与第二锥齿轮啮合传动,第三锥齿轮和第四锥齿轮啮合传动。
7.进一步,清扫张紧单元包括第一铰接耳座、第一铰接臂,第一铰接耳座与承载平台相固接,第一铰接臂一端与第一铰接耳座通过第一铰接轴相铰接,第一扭簧套装于第一铰接轴上,且第一扭簧的两作用端分别与第一铰接耳座和第一铰接臂相固接;第一铰接臂的另一端通过滚珠轴承转动支承第一转轴的下部,导向轮同轴固接于第一转轴的下部。
8.进一步,第一铰接轴、第一转轴和第三转轴相互平行,且第一转轴位于第一铰接轴和第三转轴之间。
9.进一步,齿轮箱与第一铰接臂的自由端处相固接。
10.进一步,齿轮箱由上箱壳和下箱壳组成,动力传导单元安装和容纳于齿轮箱内部。
11.本实用新型还提供了一种吊装轨道巡检机器人,在其行走装置的承载平台上位于行走装置行进方向上的前侧处,镜像设置有两套如上所述的清扫机构。
12.本实用新型的清扫机构无需主动动力输入,直接利用行走装置沿工字轨道行进时导向轮因与工字轨道抵接而发生被动转动的驱动力,此驱动力由导向轮引入,经动力传导单元完成传动及动力换向传输到扫刷,从而将与导向轮同向的顺向旋转转换为与导向轮反向的逆向的旋转,以达到清扫轨道积尘的目的。
附图说明
13.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
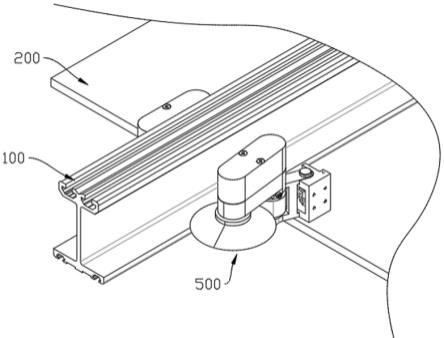
14.图1为本实用新型的清扫机构与工字轨道结合时的主视示意图;
15.图2为本实用新型的清扫机构与工字轨道结合时的立体示意图;
16.图3为清扫机构的立体示意图;
17.图4为清扫机构的爆炸图。
具体实施方式
18.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
19.下面将参考附图并结合实施例来详细说明本实用新型。
20.如图所示,在巡检机器人行走装置的承载平台200上,位于行走装置行进方向上的前侧处,以工字轨道100为中心镜像设置有两套清扫机构500,每套清扫机构500包括导向轮504、清扫张紧单元、动力传导单元和扫刷514,本实用新型的清扫机构无需主动动力输入,直接利用行走装置沿工字轨道行进时导向轮因与工字轨道抵接而发生被动转动的驱动力,此驱动力由导向轮引入,经动力传导单元完成传动及动力换向传输到扫刷,从而将与导向轮同向的顺向旋转转换为与导向轮反向的逆向的旋转,以达到清扫轨道积尘的目的。
21.具体的,导向轮504同轴固接于第一转轴505上,第一转轴505则通过滚珠轴承507与清扫张紧单元转动连接,由清扫张紧单元提供维持导向轮抵接工字轨道的弹性推力;
22.进一步,清扫张紧单元包括第一铰接耳座501、第一铰接臂502,第一铰接耳座501与承载平台200相固接,第一铰接臂502一端与第一铰接耳座501通过第一铰接轴503相铰接,第一扭簧5031套装于第一铰接轴上,且第一扭簧5031的两作用端分别与第一铰接耳座和第一铰接臂相固接,通过第一扭簧提供相应的弹性推力;第一铰接臂502的另一端通过滚珠轴承507转动支承第一转轴505的下部,导向轮同轴固接于第一转轴的下部;第一铰接臂502的自由端处还与齿轮箱506的下箱壳5062通过内六角螺栓相固接,齿轮箱506由可拆装的上箱壳5061和下箱壳5062组成,其内部安装和容纳有动力传导单元,并且使得动力传导单元整体和导向轮整体跟随第一铰接臂502的自由端同步动作;
23.动力传导单元包括容纳于齿轮箱内的第一锥齿轮508、第二锥齿轮509、第三锥齿轮510、第四锥齿轮511、第二转轴512和第三转轴513,第一转轴505的上部伸入齿轮箱内并通过滚珠轴承与齿轮箱转动连接,第一锥齿轮508同轴固接于第一转轴505上,第二转轴512
位于第一转轴和第三转轴之间且分别与第一、第三转轴相垂直,第二锥齿轮和第三锥齿轮分别同轴固接于第二转轴的两端,齿轮箱分别通过滚轴轴承转动支承第二转轴、第三转轴,第三转轴顶部同轴固接第四锥齿轮,第三转轴下部伸出齿轮箱外且同轴固接扫刷514;第一锥齿轮与第二锥齿轮啮合传动,第三锥齿轮和第四锥齿轮啮合传动,从而将与导向轮同向的顺向旋转转换为与导向轮反向的逆向的旋转。
24.进一步,第一铰接轴503、第一转轴505和第三转轴513相互平行,且第一转轴位于第一铰接轴和第三转轴513之间。
25.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.清扫机构,适用于吊装轨道巡检机器人,其特征在于,包括导向轮、清扫张紧单元、齿轮箱、动力传导单元和扫刷,导向轮同轴固接于第一转轴上,第一转轴与清扫张紧单元的自由端处转动连接,由清扫张紧单元提供维持导向轮抵接工字轨道的弹性推力;齿轮箱固接于清扫张紧单元的自由端处,动力传导单元包括容纳于齿轮箱内的第一、第二、第三和第四锥齿轮以及第二转轴、第三转轴,第二转轴位于第一转轴和第三转轴之间且分别与第一、第三转轴相垂直,齿轮箱分别通过轴承转动支承第二转轴、第三转轴,第一转轴伸入齿轮箱内的轴体同轴固接第一锥齿轮,第二锥齿轮和第三锥齿轮分别同轴固接于第二转轴的两端,第三转轴顶部同轴固接第四锥齿轮,第三转轴下部伸出齿轮箱外且同轴固接扫刷;第一锥齿轮与第二锥齿轮啮合传动,第三锥齿轮和第四锥齿轮啮合传动。2.根据权利要求1所述的清扫机构,其特征在于,清扫张紧单元包括第一铰接耳座、第一铰接臂,第一铰接耳座与承载平台相固接,第一铰接臂一端与第一铰接耳座通过第一铰接轴相铰接,第一扭簧套装于第一铰接轴上,且第一扭簧的两作用端分别与第一铰接耳座和第一铰接臂相固接;第一铰接臂的另一端通过滚珠轴承转动支承第一转轴的下部,导向轮同轴固接于第一转轴的下部。3.根据权利要求2所述的清扫机构,其特征在于,第一铰接轴、第一转轴和第三转轴相互平行,且第一转轴位于第一铰接轴和第三转轴之间。4.根据权利要求1所述的清扫机构,其特征在于,齿轮箱与第一铰接臂的自由端处相固接。5.根据权利要求4所述的清扫机构,其特征在于,齿轮箱由上箱壳和下箱壳组成,动力传导单元安装和容纳于齿轮箱内部。6.吊装轨道巡检机器人,其特征在于,在其行走装置的承载平台上位于行走装置行进方向上的前侧处,镜像设置有两套如权利要求1所述的清扫机构。
技术总结
本实用新型提供了一种吊装轨道巡检机器人及其清扫机构,在其行走装置的承载平台上位于行走装置行进方向上的前侧处,镜像设置有两套清扫机构,每套包括导向轮、清扫张紧单元、齿轮箱、动力传导单元和扫刷。本实用新型的清扫机构无需主动动力输入,直接利用行走装置沿工字轨道行进时导向轮因与工字轨道抵接而发生被动转动的驱动力,此驱动力由导向轮引入,经动力传导单元完成传动及动力换向传输到扫刷,从而将与导向轮同向的顺向旋转转换为与导向轮反向的逆向的旋转,以达到清扫轨道积尘的目的。的。的。
技术研发人员:崔子超 李磊磊 张宏帆 薛冰
受保护的技术使用者:天津博宜特科技有限公司
技术研发日:2022.03.22
技术公布日:2022/7/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。