1.本实用新型涉及人安全绳设计技术领域,主要涉及一种高空作业安全绳。
背景技术:
2.安全绳在高空作业中起到了确保操作人员安全的作用,传统安全绳采用双绳系在人体上,绳头上设有挂钩,操作人员如果需要进行高空作业,每次爬行需要先将第一个挂钩扣在第一个高度位置,当爬到第二高度位置再将第二个挂钩挂在第二个位置,然后再弯腰下身体将第一个高度的挂钩取下,爬到第三个高度时候再将第一挂钩挂在第三高度位置。现有安全绳无论采用几根安全绳进行操作都必须要弯腰操作取下前一个挂钩以便于用于后面的攀爬,使用起来并不方便,这样消耗量大量的时间和体力,对于高工作业人员来说会间接地造成危险系数增加。
3.针对上述问题,急需在原有的安全绳的结构上进行改进。
技术实现要素:
4.1、实用新型的目的
5.本发明提供一种高空作业安全绳,用以解决上述背景技术中提出传统高空作业安全绳使用时不便的技术难题。
6.2、技术方案
7.为了实现上述目的,本发明采用以下技术方案:
8.一种高空作业安全绳,包括:
9.连体部,用于系在人体上;
10.固定半夹,通过连接绳连接所述连体部;
11.活动半夹,通过转轴转动连接所述固定半夹,与所述固定半夹配对设置,所述转轴上设有弹簧;
12.压杆部,固定连接所述活动半夹,连接在所述固定半夹和活动半夹交界处的位置;
13.刹车线外壳连接部,固定连接在所述固定半夹上;
14.刹车控制把手,固定连接在所述活动半夹上;
15.所述刹车控制把手、所述刹车线外壳连接部、所述压杆部、所述活动半夹、所述固定半夹组成了机械夹;
16.所述机械夹设有三组,分别是第一机械夹、第二机械夹、第三机械夹;
17.所述第一机械夹的刹车控制把手引出刹车线连接第二机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在所述第二机械夹的刹车线外壳连接部,刹车线的内芯穿过所述第二机械夹的刹车线外壳连接部后固定连接第二机械夹的压杆部;
18.所述第二机械夹的刹车控制把手引出刹车线连接第三机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在所述第三机械夹的刹车线外壳连接部,刹车线的内芯穿过所述第三机械夹的刹车线外壳连接部后固定连接第三机械夹的压杆部;
19.所述第三机械夹的刹车控制把手引出刹车线连接第一机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在所述第一机械夹的刹车线外壳连接部,刹车线的内芯穿过所述第一机械夹的刹车线外壳连接部后固定连接第一机械夹的压杆部。
20.进一步的,所述固定半夹为半环形。
21.进一步的,所述活动半夹为半环形。
22.进一步的,所述弹簧套在所述转轴上,两端引脚分别连接所述固定半夹和所述活动半夹,给予所述固定半夹和所述活动半夹之间加紧的力,是所述固定半夹和所述活动半夹一直处于加紧状态。
23.进一步的,所述刹车控制把手为自行车刹车把手,包括固定部和转动部,其中固定部连接刹车线的外壳,转动部连接所述刹车线的内芯。
24.进一步的,连体部上设有四个连接环,所述连接环内穿有安全带,所述安全带用于系在人体上。
25.3、有益效果
26.与现有技术相比,本实用新型的有益效果是:
27.本实用新型通过采用第一机械夹的刹车控制把手引出刹车线连接第二机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在第二机械夹的刹车线外壳连接部,刹车线的内芯穿过第二机械夹的刹车线外壳连接部后固定连接第二机械夹的压杆部;
28.第二机械夹的刹车控制把手引出刹车线连接第三机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在第三机械夹的刹车线外壳连接部,刹车线的内芯穿过第三机械夹的刹车线外壳连接部后固定连接第三机械夹的压杆部;
29.第三机械夹的刹车控制把手引出刹车线连接第一机械夹的刹车线外壳连接部,其中刹车线外壳固定连接在第一机械夹的刹车线外壳连接部,刹车线的内芯穿过第一机械夹的刹车线外壳连接部后固定连接第一机械夹的压杆部。从而使得操作人员在高空攀爬时候,只需要将每怕一个高度扣上对应的机械夹,达到第三个高度需要第三个机械加时候可以直接通过操作第三个机械夹上的刹车控制把手,通过刹车线的拉扯使得第一个机械夹上的压杆部和刹车线外壳连接部距离相对拉近,从而使得第一个机械夹打开,从第一个高度的位置脱落,再通过连接第一个机械夹的连接绳把第一个机械夹取上来,用来扣在第四高度的位置,同理此时可以操作第一个机械夹上的刹车控制把手来使第二个机械夹脱落,同理每次进行向上爬行的操作如此,从而使得及时操作人员不弯腰去解开以前一个夹子也可以通过手里的夹子来操控剩下的另一个夹子,进而节省了操作人员的体力,进而提高了工作效率。
附图说明
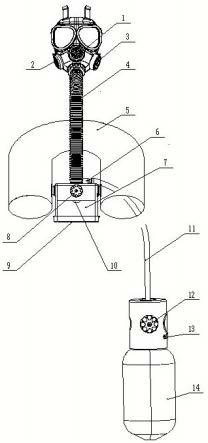
30.图1为一种高空作业安全绳的整体结构示意图;
31.图2为机械爪的结构展示图。
32.附图标记
33.连体部—1,连接环—11,固定半夹—2,连接绳—3,活动半夹—4,转轴—41,压杆部—5,刹车线外壳连接部—6,刹车控制把手—7,固定部—71,和转动部—72,第一机械夹—a,第二机械夹—b,第三机械夹—c。
具体实施方式
34.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“页”、“底”“内”、“外”、"顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
35.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
36.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”、“设有”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
实施例
37.参考图1-2,一种高空作业安全绳,包括:
38.连体部1,用于系在人体上;
39.固定半夹2,通过连接绳3连接连体部1;
40.活动半夹4,通过转轴41转动连接固定半夹2,与固定半夹2配对设置,转轴41上设有弹簧;
41.压杆部5,固定连接活动半夹4,连接在固定半夹2和活动半夹4交界处的位置;
42.刹车线外壳连接部6,固定连接在固定半夹2上;
43.刹车控制把手7,固定连接在活动半夹4上;
44.刹车控制把手7、刹车线外壳连接部6、压杆部5、活动半夹4、固定半夹2组成了机械夹;
45.机械夹设有三组,分别是第一机械夹a、第二机械夹b、第三机械夹c;
46.第一机械夹a的刹车控制把手7引出刹车线连接第二机械夹b的刹车线外壳连接部6,其中刹车线外壳固定连接在第二机械夹b的刹车线外壳连接部6,刹车线的内芯穿过第二机械夹b的刹车线外壳连接部6后固定连接第二机械夹b的压杆部5;
47.第二机械夹b的刹车控制把手7引出刹车线连接第三机械夹c的刹车线外壳连接部6,其中刹车线外壳固定连接在第三机械夹c的刹车线外壳连接部6,刹车线的内芯穿过第三机械夹c的刹车线外壳连接部6后固定连接第三机械夹c的压杆部5;
48.第三机械夹c的刹车控制把手7引出刹车线连接第一机械夹a的刹车线外壳连接部6,其中刹车线外壳固定连接在第一机械夹a的刹车线外壳连接部6,刹车线的内芯穿过第一机械夹a的刹车线外壳连接部6后固定连接第一机械夹a的压杆部5。
49.参考图1-2,固定半夹2为半环形。本实用新型对固定半夹2的形状不做限定,满足和活动半夹4之间可以围成一个空间区域,用于高工作业中夹持在各种安全环或者提子栏
杆上。
50.参考图1-2,活动半夹4为半环形。本实用新型对活动半夹4的形状不做限定,优先采用半环形结构,考虑带夹子夹持的稳定性防止外力过大导致夹子脱落,具体实施中,可以采用定半夹的环形弧度大于活动半夹4的环形弧度,但两者始终保持在自然状态下两者可以围成一个封闭的空间区域。
51.参考图1-2,弹簧套在转轴41上,两端引脚分别连接固定半夹2和活动半夹4,给予固定半夹2和活动半夹4之间加紧的力,是固定半夹2和活动半夹4一直处于加紧状态。
52.参考图1-2,刹车控制把手7为自行车刹车把手,包括固定部71和转动部72,其中固定部连接刹车线的外壳,转动部连接刹车线的内芯。本实用新型对刹车控制把手7型号不做限定,有限考虑采用本领域常见的自行车的刹车把手结构。
53.参考图1-2,连体部1上设有四个连接环11,连接环内穿有安全带,安全带用于系在人体上。
54.本实施例的技术原理在于:在弹簧的作用下,机械夹的固定半夹2和活动半夹4之间一直处于经闭的,只有在刹车线的拉扯压杆部5和刹车线外壳连接部6之间距离时,才会使得机械夹打开。当操作员需要攀爬第一高度时候,将第一机械夹a加紧在第一高度位置,
55.当操作员爬到第二高度时,将第二机械夹b加紧在第二高度位置,当操作员爬到第三高度时,通过操作第三机械夹c上的刹车控制把手7控制第一机械夹脱落,然后将第三机械夹c加紧在第三高度位置,当操作员爬到第四高度时候,将之前脱落的第一机械夹a顺着连接绳3或刹车线拉倒受力,然后通过操作第一机械夹a上的刹车控制把手7控制第二机械夹脱落,再将第一机械夹a加紧在第四高度位置,同理,操作员可以在中间始终有一根绳子的安全状态先,无需弯腰下身去解开前一个夹子就能实现快速安全的高空位置变换作业。本实用新型不仅可以使用不同高度的攀爬,在高空中不同位置的转移也是需要用到上述一样的方法进行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。