1.本发明是关于雷达技术领域,特别是关于一种一对多分时跨重周干扰的实现方法。
背景技术:
2.随着科学技术的飞速发展,大量的高新技术应用到了现代战争中,电子战的重要性越来越高。战场上为了降低敌方武器系统的攻击能力,需要精确打击敌方雷达,为了更好地指引干扰系统对敌方雷达进行打击,需要我方引导系统对干扰系统进行精确引导。并且现代电磁环境日趋复杂,引导系统需要针对多部雷达进行检测和引导,由此产生了一对多的概念。现有大多数干扰机收发都是分时的,如果收发同时的话,隔离工作做得不好会产生自激,所以本设计仍然采用收发分时模式。当前主流的干扰引导系统主要由首脉冲捕捉电路、半波门产生电路、半波门波门协调电路、pri计数器、丢失控制电路以及波门输出控制电路组成。这些电路虽然采用了模块化的设计思路但是模块功能划分模糊,存在重复工作、耗费资源大等问题。并且大部分只针对单部雷达进行干扰,不能合理分配干扰资源。
技术实现要素:
3.为实现上述目的,本发明提供了一种一对多分时跨重周干扰的实现方法,其特征在于,方法由干扰系统执行,方法包括如下步骤:
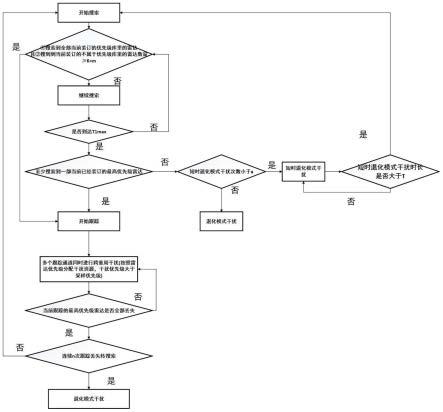
4.s1:在系统上电之后,进入侦察分选模式并设置雷达优先级库;
5.s2:在进入侦察分选模式并设置雷达优先级库之后,开始进行侦察;
6.s3:如果分选结果已经分选到雷达优先级库中的所有雷达,并且分选到的不属于雷达优先级库中的雷达的数量大于或者等于n0,则转入步骤s4;如果分选结果没有分选到雷达优先级库中的所有雷达,或者分选到的不属于雷达优先级库中的雷达的数量小于n0,则转入步骤 s5;
7.s4:对需要干扰的辐射源参数进行装订,其中,需要干扰的辐射源是分选到的雷达;
8.s5:继续进行侦察,并且判断所用时间是否大于侦察窗的长度t0max,如果判断所用时间大于t0max,则转入步骤s4;如果判断所用时间小于t0max,则转入步骤s3;
9.s6:在完成步骤s4之后,判断n0是否大于0。
10.在一优选的实施方式中,方法包括如下步骤:
11.如果判断n0为0,则转入步骤s7;
12.s7:开始搜索雷达;
13.s8:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中, k是比例系数,m0表示优先级库中的雷达数量,如果判断不属于雷达优先级库中的雷达的数量小于k*m0,则转入步骤s9,如果判断不属于雷达优先级库中的雷达的数量大于或者等于 k*m0,则转入步骤s11;
14.s9:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s8;如果判断搜索时间大于搜索时长t1max,则转入步骤s10;
15.s10:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于0,如果搜索到的不属于雷达优先级库中的雷达的数量大于0,则转入步骤s11;如果搜索到的不属于雷达优先级库中的雷达的数量为0,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;
16.s11:开始进行跟踪。
17.在一优选的实施方式中,方法包括如下步骤:
18.s12:多个跟踪通道同时进行跨重周干扰,其中,当前没有装订优先级库内的雷达,并且采用轮流干扰模式,其中,在轮流干扰模式中,干扰优先级大于采样优先级;
19.s13:判断当前跟踪的雷达的丢失比例系数是否大于k1,如果当前跟踪的雷达的丢失比例系数小于k1,则转入步骤s12;如果当前跟踪的雷达的丢失比例系数大于或者等于k1,则转入步骤s14;
20.s14:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s7。
21.在一优选的实施方式中,方法包括如下步骤:
22.如果判断n0为0,则转入步骤s15;
23.s15:开始搜索雷达;
24.s16:判断是否满足以下条件a和b:a:搜索到优先级库里的所有雷达,以及b:搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中,k是比例系数,m0 表示优先级库中的雷达数量,如果判断不满足条件a或者b,则转入步骤s17,如果判断满足条件a以及b,则转入步骤s21;
25.s17:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s16;如果判断搜索时间大于搜索时长t1max,则转入步骤s18;
26.s18:判断是否至少搜索到一部当前已经装订的最高优先级雷达,如果判断至少搜索到一部当前已经装订的最高优先级雷达,则转入步骤s21;如果判断没有搜索到一部当前已经装订的最高优先级雷达,则转入步骤s19;
27.s19:判断进入短时退化模式的次数是否小于第二预定门限a0,其中,短时退化模式是有时间限制的退化模式,如果判断进入短时退化模式的次数小于第二预定门限a0,则转入步骤s20;如果判断进入短时退化模式的次数大于第二预定门限a0,则进入退化模式。
28.在一优选的实施方式中,方法包括如下步骤:
29.s20:进入短时退化模式,并判断短时退化模式干扰时长是否大于第三预定门限t1,如果判断短时退化模式干扰时长小于第三预定门限t1,则继续保持在短时退化模式中,如果判断短时退化模式干扰时长大于第三预定门限t1,则转入步骤s15;
30.s21:开始进行跟踪。
31.在一优选的实施方式中,方法包括如下步骤:
32.s22:多个跟踪通道同时进行跨重周干扰,其中,按照雷达优先级分配干扰资源;
33.s23:判断当前跟踪的雷达的丢失比例系数是否全部丢失,如果当前跟踪的雷达没有全部丢失,则转入步骤s22;如果当前跟踪的雷达全部丢失,则转入步骤s24;
34.s24:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s15。
35.本发明提供了一种一对多分时跨重周干扰系统,其特征在于,干扰系统被配置为进行以下操作:
36.s1:在系统上电之后,进入侦察分选模式并设置雷达优先级库;
37.s2:在进入侦察分选模式并设置雷达优先级库之后,开始进行侦察;
38.s3:如果分选结果已经分选到雷达优先级库中的所有雷达,并且分选到的不属于雷达优先级库中的雷达的数量大于或者等于n0,则转入步骤s4;如果分选结果没有分选到雷达优先级库中的所有雷达,或者分选到的不属于雷达优先级库中的雷达的数量小于n0,则转入步骤 s5;
39.s4:对需要干扰的辐射源参数进行装订,其中,需要干扰的辐射源是分选到的雷达;
40.s5:继续进行侦察,并且判断所用时间是否大于侦察窗的长度t0max,如果判断所用时间大于t0max,则转入步骤s4;如果判断所用时间小于t0max,则转入步骤s3;
41.s6:在完成步骤s4之后,判断n0是否大于0。
42.在一优选的实施方式中,干扰系统被配置为进行以下操作:
43.如果判断n0为0,则转入步骤s7;
44.s7:开始搜索雷达;
45.s8:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中, k是比例系数,m0表示优先级库中的雷达数量,如果判断不属于雷达优先级库中的雷达的数量小于k*m0,则转入步骤s9,如果判断不属于雷达优先级库中的雷达的数量大于或者等于 k*m0,则转入步骤s11;
46.s9:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s8;如果判断搜索时间大于搜索时长t1max,则转入步骤s10;
47.s10:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于0,如果搜索到的不属于雷达优先级库中的雷达的数量大于0,则转入步骤s11;如果搜索到的不属于雷达优先级库中的雷达的数量为0,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;
48.s11:开始进行跟踪。
49.在一优选的实施方式中,干扰系统被配置为进行以下操作:
50.s12:多个跟踪通道同时进行跨重周干扰,其中,当前没有装订优先级库内的雷达,并且采用轮流干扰模式,其中,在轮流干扰模式中,干扰优先级大于采样优先级;
51.s13:判断当前跟踪的雷达的丢失比例系数是否大于k1,如果当前跟踪的雷达的丢失比例系数小于k1,则转入步骤s12;如果当前跟踪的雷达的丢失比例系数大于或者等于k1,则转入步骤s14;
52.s14:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s7。
53.在一优选的实施方式中,干扰系统被配置为进行以下操作:
54.如果判断n0为0,则转入步骤s15;
55.s15:开始搜索雷达;
56.s16:判断是否满足以下条件a和b:a:搜索到优先级库里的所有雷达,以及b:搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中,k是比例系数,m0 表示优先级库中的雷达数量,如果判断不满足条件a或者b,则转入步骤s17,如果判断满足条件a以及b,则转入步骤s21;
57.s17:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s16;如果判断搜索时间大于搜索时长t1max,则转入步骤s18;
58.s18:判断是否至少搜索到一部当前已经装订的最高优先级雷达,如果判断至少搜索到一部当前已经装订的最高优先级雷达,则转入步骤s21;如果判断没有搜索到一部当前已经装订的最高优先级雷达,则转入步骤s19;
59.s19:判断进入短时退化模式的次数是否小于第二预定门限a0,其中,短时退化模式是有时间限制的退化模式,如果判断进入短时退化模式的次数小于第二预定门限a0,则转入步骤s20;如果判断进入短时退化模式的次数大于第二预定门限a0,则进入退化模式,
60.s20:进入短时退化模式,并判断短时退化模式干扰时长是否大于第三预定门限t1,如果判断短时退化模式干扰时长小于第三预定门限t1,则继续保持在短时退化模式中,如果判断短时退化模式干扰时长大于第三预定门限t1,则转入步骤s15;
61.s21:开始进行跟踪,
62.s22:多个跟踪通道同时进行跨重周干扰,其中,按照雷达优先级分配干扰资源;
63.s23:判断当前跟踪的雷达的丢失比例系数是否全部丢失,如果当前跟踪的雷达没有全部丢失,则转入步骤s22;如果当前跟踪的雷达全部丢失,则转入步骤s24;
64.s24:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s15。
65.与现有技术相比,本发明具有如下优点,本发明针对当前一对一干扰的局限,设计了一种依据雷达优先级分配单部雷达干扰资源的方法,该方法适用于跨重周干扰多部雷达,并且可以选择释放压制或欺骗干扰。
附图说明
66.图1是根据本发明的一个实施方式的方法流程图。
67.图2是根据本发明的一个实施方式的方法流程图。
68.图3是根据本发明的一个实施方式的方法流程图。
具体实施方式
69.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
70.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
71.图1是根据本发明的一个实施方式的方法流程图。图2是根据本发明的一个实施方式的方法流程图。图3是根据本发明的一个实施方式的方法流程图。如图所示,
72.方法包括如下步骤:
73.s1:在系统上电之后,进入侦察分选模式并设置雷达优先级库;
74.s2:在进入侦察分选模式并设置雷达优先级库之后,开始进行侦察;
75.s3:如果分选结果已经分选到雷达优先级库中的所有雷达,并且分选到的不属于雷达优先级库中的雷达的数量大于或者等于n0,则转入步骤s4;如果分选结果没有分选到雷达优先级库中的所有雷达,或者分选到的不属于雷达优先级库中的雷达的数量小于n0,则转入步骤 s5;
76.s4:对需要干扰的辐射源参数进行装订,其中,需要干扰的辐射源是分选到的雷达;
77.s5:继续进行侦察,并且判断所用时间是否大于侦察窗的长度t0max,如果判断所用时间大于t0max,则转入步骤s4;如果判断所用时间小于t0max,则转入步骤s3;
78.s6:在完成步骤s4之后,判断n0是否大于0。
79.在一优选的实施方式中,方法包括如下步骤:
80.如果判断n0为0,则转入步骤s7;
81.s7:开始搜索雷达;
82.s8:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中, k是比例系数,m0表示优先级库中的雷达数量,如果判断不属于雷达优先级库中的雷达的数量小于k*m0,则转入步骤s9,如果判断不属于雷达优先级库中的雷达的数量大于或者等于 k*m0,则转入步骤s11;
83.s9:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s8;如果判断搜索时间大于搜索时长t1max,则转入步骤s10;
84.s10:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于0,如果搜索到的不属于雷达优先级库中的雷达的数量大于0,则转入步骤s11;如果搜索到的不属于雷达优先级库中的雷达的数量为0,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;
85.s11:开始进行跟踪。
86.在一优选的实施方式中,方法包括如下步骤:
87.s12:多个跟踪通道同时进行跨重周干扰,其中,当前没有装订优先级库内的雷达,并且采用轮流干扰模式,其中,在轮流干扰模式中,干扰优先级大于采样优先级;
88.s13:判断当前跟踪的雷达的丢失比例系数是否大于k1,如果当前跟踪的雷达的丢失比例系数小于k1,则转入步骤s12;如果当前跟踪的雷达的丢失比例系数大于或者等于k1,则转入步骤s14;
89.s14:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s7。
90.在一优选的实施方式中,方法包括如下步骤:
91.如果判断n0为0,则转入步骤s15;
92.s15:开始搜索雷达;
93.s16:判断是否满足以下条件a和b:a:搜索到优先级库里的所有雷达,以及b:搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中,k是比例系数,m0 表示优先级库中的雷达数量,如果判断不满足条件a或者b,则转入步骤s17,如果判断满足条件a以及b,则转入步骤s21;
94.s17:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s16;如果判断搜索时间大于搜索时长t1max,则转入步骤s18;
95.s18:判断是否至少搜索到一部当前已经装订的最高优先级雷达,如果判断至少搜索到一部当前已经装订的最高优先级雷达,则转入步骤s21;如果判断没有搜索到一部当前已经装订的最高优先级雷达,则转入步骤s19;
96.s19:判断进入短时退化模式的次数是否小于第二预定门限a0,其中,短时退化模式是有时间限制的退化模式,如果判断进入短时退化模式的次数小于第二预定门限a0,则转入步骤 s20;如果判断进入短时退化模式的次数大于第二预定门限a0,则进入退化模式。
97.在一优选的实施方式中,方法包括如下步骤:
98.s20:进入短时退化模式,并判断短时退化模式干扰时长是否大于第三预定门限t1,如果判断短时退化模式干扰时长小于第三预定门限t1,则继续保持在短时退化模式中,如果判断短时退化模式干扰时长大于第三预定门限t1,则转入步骤s15;
99.s21:开始进行跟踪。
100.在一优选的实施方式中,方法包括如下步骤:
101.s22:多个跟踪通道同时进行跨重周干扰,其中,按照雷达优先级分配干扰资源;
102.s23:判断当前跟踪的雷达的丢失比例系数是否全部丢失,如果当前跟踪的雷达没有全部丢失,则转入步骤s22;如果当前跟踪的雷达全部丢失,则转入步骤s24;
103.s24:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限
n,则转入步骤s15。
104.本发明提供了一种一对多分时跨重周干扰系统,其特征在于,干扰系统被配置为进行以下操作:
105.s1:在系统上电之后,进入侦察分选模式并设置雷达优先级库;
106.s2:在进入侦察分选模式并设置雷达优先级库之后,开始进行侦察;
107.s3:如果分选结果已经分选到雷达优先级库中的所有雷达,并且分选到的不属于雷达优先级库中的雷达的数量大于或者等于n0,则转入步骤s4;如果分选结果没有分选到雷达优先级库中的所有雷达,或者分选到的不属于雷达优先级库中的雷达的数量小于n0,则转入步骤 s5;
108.s4:对需要干扰的辐射源参数进行装订,其中,需要干扰的辐射源是分选到的雷达;
109.s5:继续进行侦察,并且判断所用时间是否大于侦察窗的长度t0max,如果判断所用时间大于t0max,则转入步骤s4;如果判断所用时间小于t0max,则转入步骤s3;
110.s6:在完成步骤s4之后,判断n0是否大于0。
111.在一优选的实施方式中,干扰系统被配置为进行以下操作:
112.如果判断n0为0,则转入步骤s7;
113.s7:开始搜索雷达;
114.s8:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中, k是比例系数,m0表示优先级库中的雷达数量,如果判断不属于雷达优先级库中的雷达的数量小于k*m0,则转入步骤s9,如果判断不属于雷达优先级库中的雷达的数量大于或者等于 k*m0,则转入步骤s11;
115.s9:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s8;如果判断搜索时间大于搜索时长t1max,则转入步骤s10;
116.s10:判断搜索到的不属于雷达优先级库中的雷达的数量是否大于0,如果搜索到的不属于雷达优先级库中的雷达的数量大于0,则转入步骤s11;如果搜索到的不属于雷达优先级库中的雷达的数量为0,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;
117.s11:开始进行跟踪。
118.在一优选的实施方式中,干扰系统被配置为进行以下操作:
119.s12:多个跟踪通道同时进行跨重周干扰,其中,当前没有装订优先级库内的雷达,并且采用轮流干扰模式,其中,在轮流干扰模式中,干扰优先级大于采样优先级;
120.s13:判断当前跟踪的雷达的丢失比例系数是否大于k1,如果当前跟踪的雷达的丢失比例系数小于k1,则转入步骤s12;如果当前跟踪的雷达的丢失比例系数大于或者等于k1,则转入步骤s14;
121.s14:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s7。
122.在一优选的实施方式中,干扰系统被配置为进行以下操作:
123.如果判断n0为0,则转入步骤s15;
124.s15:开始搜索雷达;
125.s16:判断是否满足以下条件a和b:a:搜索到优先级库里的所有雷达,以及b:搜索到的不属于雷达优先级库中的雷达的数量是否大于或者等于k*m0,其中,k是比例系数,m0 表示优先级库中的雷达数量,如果判断不满足条件a或者b,则转入步骤s17,如果判断满足条件a以及b,则转入步骤s21;
126.s17:继续进行搜索,并判断搜索时间是否大于搜索时长t1max,如果判断搜索时间小于搜索时长t1max,则转入步骤s16;如果判断搜索时间大于搜索时长t1max,则转入步骤s18;
127.s18:判断是否至少搜索到一部当前已经装订的最高优先级雷达,如果判断至少搜索到一部当前已经装订的最高优先级雷达,则转入步骤s21;如果判断没有搜索到一部当前已经装订的最高优先级雷达,则转入步骤s19;
128.s19:判断进入短时退化模式的次数是否小于第二预定门限a0,其中,短时退化模式是有时间限制的退化模式,如果判断进入短时退化模式的次数小于第二预定门限a0,则转入步骤 s20;如果判断进入短时退化模式的次数大于第二预定门限a0,则进入退化模式,
129.s20:进入短时退化模式,并判断短时退化模式干扰时长是否大于第三预定门限t1,如果判断短时退化模式干扰时长小于第三预定门限t1,则继续保持在短时退化模式中,如果判断短时退化模式干扰时长大于第三预定门限t1,则转入步骤s15;
130.s21:开始进行跟踪,
131.s22:多个跟踪通道同时进行跨重周干扰,其中,按照雷达优先级分配干扰资源;
132.s23:判断当前跟踪的雷达的丢失比例系数是否全部丢失,如果当前跟踪的雷达没有全部丢失,则转入步骤s22;如果当前跟踪的雷达全部丢失,则转入步骤s24;
133.s24:判断由跟踪状态转入搜索状态的次数是否大于预定门限n,如果由跟踪状态转入搜索状态的次数大于预定门限n,则进入退化模式,其中,在退化模式中,不再进行重频跟踪,每采集到一个信号就转发干扰;如果由跟踪状态转入搜索状态的次数小于预定门限n,则转入步骤s15。
134.应当理解的是,在本发明的各种实施例中,上述各过程的撰写的先后顺序并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
135.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。