1.本发明属于运动目标相对位置测量技术领域,尤其涉及一种基于空间光通信的运动目标相对位置测量系统。
背景技术:
2.运动目标指的是可以进行动作的目标,通常指的是空中运动目标,如航天器、无人机等。无人机自主着陆/着舰、空中加油、编队协同等关键作战任务对高精度相对定位引导技术有着迫切需求。
3.目前常用的引导技术包括卫星引导、雷达引导和光电引导等。卫星引导技术是利用几何定位原理,通过卫星高精度三维导航信息测量出载体间相对位姿的一种方式,具有全天时、全天候、高精度、低成本、小型化等诸多优点。雷达引导着舰技术通过舰载雷达装置测量出飞机与舰船的相对速度、高度、方位等导航信息,并将解算出的信息与理想轨迹的偏差量和下滑道信息等发送给机载接收端,进而引导无人机沿下滑道着舰,其优点在于不受光照条件影响,在能见度较差的复杂环境下作用距离仍大于数十公里。光电引导技术主要通过采用视觉相机对载体或合作目标(即无人机)成像,通过图像处理与目标识别跟踪算法配合高精度双轴伺服机构,实现对无人机的实时跟踪与角度测量,再实现高精度距离测量,获得机舰间相对位置关系,其优点在于系统结构简单、成本低、定位精度较高等特点。
4.但是,卫星引导技术和雷达引导技术易受电磁干扰,光电引导技术易受天气影响,因此,会导致相对定位引导的误差增大。
技术实现要素:
5.本发明的目的是提供一种基于空间光通信的运动目标相对位置测量系统,以激光扫描方式完成无人机的相对定位,进而减小相对定位引导的误差。
6.本发明采用以下技术方案:一种基于空间光通信的运动目标相对位置测量系统,包括设置于固定端的激光扫描发射装置和设置于运动目标上的激光接收测距装置;
7.激光扫描发射装置包括可调制脉冲激光器,可调制脉冲激光器通过发射光学机构连接有激光扫描机构;
8.可调制脉冲激光器和激光扫描机构均连接至同一总控单元;其中,总控单元用于接收运动目标的导航信息,并根据导航信息生成激光扫描机构的第一控制信息,以使激光扫描机构在预定区域形成激光场区;
9.激光接收测距装置用于当检测到激光场区内的第一激光信号时,解析第一激光信号,并根据解析结果向激光扫描发射装置的角反射器发射第二激光信号,以及接收反射后的第二激光信号,根据第二激光信号计算运动目标与固定端的相对位置信息。
10.进一步地,激光接收测距装置包括接收光学机构,接收光学机构用于接收激光场区内的第一激光信号并发出,还用于接收反射后的第二激光信号并发出;
11.接收光学机构连接转换处理机构,转换处理机构连接有激光测距机构;转换处理
机构用于接收光学机构发出的第一激光信号并解析,根据解析结果向激光测距机构发送第二控制信息;转换处理机构还用于接收接收光学机构发出的反射后的第二激光信号,并根据反射后的第二激光信号计算运动目标与固定端的相对位置信息。
12.进一步地,发射光学机构包括第一发射光学单元和第二发射光学单元;其中,第一发射光学单元用于发射第一激光束,第二发射光学单元用于发射第二激光束,第一激光束与第二激光束相互垂直。
13.进一步地,激光扫描机构包括第一激光扫描单元和第二激光扫描单元;第一激光扫描单元用于控制第一激光束在水平和垂直方向上往复运动,第二激光扫描单元用于控制第二激光束在水平和垂直方向上往复运动。
14.进一步地,激光场区为锥形激光场区。
15.进一步地,第一发射光学单元和第二发射光学单元均包括依次设置在同一光路上的准直镜、柱面镜和直角棱镜。
16.进一步地,第一激光扫描单元和第二激光扫描单元均包括依次设置的振镜和扩束镜,振镜与对应的直角棱镜光路连接。
17.进一步地,转换处理机构包括与接收光学机构数据连接的光电探测器,光学探测器还依次连接有信号放大器、模数转换单元和数据处理单元。
18.进一步地,激光测距机构包括与数据处理单元连接的激光指向跟踪机构,激光指向跟踪机构上安装有测距脉冲激光器,测距脉冲激光器还连接有测距发射光学机构。
19.本发明的另一种技术方案:一种基于空间光通信的运动目标相对位置测量方法,使用上述的一种基于空间光通信的运动目标相对位置测量系统,包括以下步骤:
20.通过激光扫描发射装置在预定区域形成激光场区;
21.当运动目标上的激光接收测距装置检测到激光场区内的第一激光信号时,解析第一激光信号,并根据解析结果向激光扫描发射装置的角反射器发射第二激光信号;其中,第一激光信号中包含运动目标的导航信息;
22.通过激光接收测距装置接收反射后的第二激光信号;其中,第二激光信号发射后经过激光扫描发射装置的角反射器反射后,形成反射后的第二激光信号;
23.根据反射后的第二激光信号计算测距信息。
24.本发明的有益效果是:本发明利用激光良好的单色性、准直性与可调制性,结合光电探测与激光测距技术,实现在卫星拒止、无线电静默等强电磁对抗环境下相对定位导航与通信的难题,可以提升电磁干扰条件下相对定位引导的定位精度,且具有作用距离远、数据更新率高、体积重量小、功耗低等优点,可以应用于无人机自主着陆/着舰、空中加油、编队协同等关键作战任务中。
附图说明
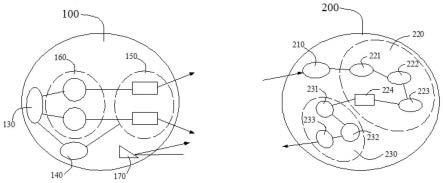
25.图1为本发明实施例一种基于空间光通信的运动目标相对位置测量系统的结构示意图;
26.图2为本发明实施例中激光扫描发射装置中的激光光路示意图;
27.图3为本发明实施例中总控单元激光编码模块的编码流程图。
28.其中:100.激光扫描发射装置;
29.130.可调制脉冲激光器;140.总控单元;
30.150.激光扫描机构;151.振镜;152.扩束镜;
31.160.发射光学机构;161.准直镜;162.柱面镜;163.直角棱镜;
32.170.角反射器;
33.200.激光接收测距装置;
34.210.接收光学机构;
35.220.转换处理机构;221.光学探测器;222.信号放大器;223.模数转换单元;224.数据处理单元;
36.230.激光测距机构;231.激光指向跟踪机构;232.测距脉冲激光器;233.测距发射光学机构。
具体实施方式
37.下面结合附图和具体实施方式对本发明进行详细说明。
38.本发明公开了一种基于空间光通信的运动目标相对位置测量系统,如图1所示,包括设置于固定端的激光扫描发射装置100和设置于运动目标上的激光接收测距装置200。在本发明实施例中的固定端,指的是在测距过程中的相对的固定端,如在无人机着陆过程中,无人机待降落的位置(或者是与该位置对应的制定某个位置)即为固定端。在另一个场景中,如在舰船上,无人机要降落的舰船也可以作为该固定端。另外,该实施例中的运动目标可以是上述的无人机,也可以是其他飞行器(即相对于固定端运动的飞行器)等。
39.在一个实施例中,激光扫描发射装置100包括可调制脉冲激光器130,可调制脉冲激光器130通过发射光学机构160连接有激光扫描机构150;可调制脉冲激光器130和激光扫描机构150均连接至同一总控单元140;其中,总控单元140用于接收运动目标的导航信息,并根据导航信息生成激光扫描机构150的第一控制信息,以使激光扫描机构150在预定区域形成激光场区。
40.在本实施例中,可调制脉冲激光器130产生高功率的短波红外脉冲激光,经过发射光学机构160的准直与整形,形成两束相互垂直的线形激光,再经过激光扫描机构150使两束线激光在水平与垂直两个方向上往返运动,在激光扫描发射装置100前方锥形区域内形成激光信息场区。总控单元140负责接收运动目标上其他导航源(如惯导、卫导等)的导航信息,再将这些信息与空间扫描方位信息一起编码并调制到激光信号中去,同时完成对激光扫描机构150的控制。
41.在一个实施例中,激光接收测距装置200用于当检测到激光场区内的第一激光信号时,解析第一激光信号,并根据解析结果向激光扫描发射装置100的角反射器170发射第二激光信号,以及接收反射后的第二激光信号,根据第二激光信号计算运动目标与固定端的相对位置信息。
42.本发明利用激光良好的单色性、准直性与可调制性,结合光电探测与激光测距技术,实现在卫星拒止、无线电静默等强电磁对抗环境下相对定位导航与通信的难题,可以提升电磁干扰条件下相对定位引导的定位精度,且具有作用距离远、数据更新率高、体积重量小、功耗低等优点,可以应用于无人机自主着陆/着舰、空中加油、编队协同等关键作战任务中。
43.具体的,激光接收测距装置200包括接收光学机构210,接收光学机构210用于接收激光场区内的第一激光信号并发出,还用于接收反射后的第二激光信号并发出。接收光学机构210连接转换处理机构220,转换处理机构220连接有激光测距机构230;转换处理机构220用于接收光学机构210发出的第一激光信号并解析,根据解析结果向激光测距机构230发送第二控制信息;转换处理机构220还用于接收上述接收光学机构210发出的反射后的第二激光信号,并根据反射后的第二激光信号计算运动目标与固定端的相对位置信息。
44.在一个实施例中,转换处理机构220包括与接收光学机构210数据连接的光电探测器221,光学探测器221还依次连接有信号放大器222、模数转换单元223和数据处理单元224。激光测距机构230包括与数据处理单元224连接的激光指向跟踪机构231,激光指向跟踪机构231上安装有测距脉冲激光器232,测距脉冲激光器232还连接有测距发射光学机构233。
45.更为具体的,在激光接收测距装置200部分,接收光学机构210将激光信号汇聚到光学探测器221上,光学探测器221将光信号转换为电信号,信号放大器222对电信号进行整形放大,模数转换单元223将模拟电信号转换成数字信号,送入数据处理单元224。数据处理单元224对数字信号进行解码,得到自身相对于激光扫描发射装置100的空间方位信息和其他导航信息,再根据这些信息控制激光指向跟踪机构231转向对准激光扫描发射装置100,并控制测距脉冲激光器232发射激光测距脉冲,最后通过测距发射光学机构233将激光测距脉冲发射出去,发射出去的激光测距脉冲通过激光扫描发射装置100上的角反射器170沿原路返回,经过接收光学机构210返回到光学探测器221上,信号放大器222、模数转换单元223进入数据处理单元224,数据处理单元224跟据飞行时间原理计算自身(即运动目标)与激光扫描发射装置100之间的相对距离,最后将测角信息、测距信息与其他导航信息融合,实现两个运动目标之间的相对位置测量与通信。
46.另外,在本发明实施例中,发射光学机构160包括第一发射光学单元和第二发射光学单元;其中,第一发射光学单元用于发射第一激光束,第二发射光学单元用于发射第二激光束,第一激光束与第二激光束相互垂直。相对应的,激光扫描机构150包括第一激光扫描单元和第二激光扫描单元;第一激光扫描单元用于控制第一激光束在水平和垂直方向上往复运动,第二激光扫描单元用于控制第二激光束在水平和垂直方向上往复运动。进而,可以在预定区域形成锥形的激光场区,以便于运动目标检测到第一激光信号。
47.作为一种具体的实现方式,如图2所示,第一发射光学单元和第二发射光学单元均包括依次设置在同一光路上的准直镜161、柱面镜162和直角棱镜163。第一激光扫描单元和第二激光扫描单元均包括依次设置的振镜151和扩束镜152,振镜151与对应的直角棱镜163光路连接。
48.一般的激光扫描装置大都采用单点激光逐点扫描的方式,扫描速度慢、周期长,难以满足高动态目标测量的需求。本发明实施例通过独特的发射光学系统设计,将单点激光转换成扇面激光束,配合相应的激光编码扫描控制方式,仅扫描一次即可完成测量,数据更新率可达100hz,满足高动态载体间相对定位的需求。
49.具体的,可调制脉冲激光器130发出的激光束首先经过准直镜161的准直,再由柱面镜162整形成扇面激光束,经过直角棱镜163转向照射在高速扫描地振镜151上,振镜151通过高速摆动形成扫描激光场,最后经由扩束镜152放大发射到预定区域的空间中。总控单
元140中的扫描控制模块对振镜151的运动轨迹和速度进行控制,振镜151的位置反馈信号经过采样进入总控单元140中的激光编码模块,激光编码模块以激光脉位调制(ppm)的方式对振镜151的位置信息和其他导航信息进行编码并调制到激光脉冲当中,具体的编码流程如图3所示。
50.作为一种具体的实现方式,如下表1所示,为本发明实施例中各机构/单元的调节参数。
[0051][0052][0053]
综上,本发明采用空间测角、测距与通信一体化设计,通过单色激光的扫描、调制与接受实现相对距离、方位角、俯仰角的精确测量以及导航信息的空间传输。激光扫描发射装置100发射经过调制的激光束,通过扫描机构形成携带空间方位信息和其他附加导航信息的激光场,处于激光场中的激光接收测距装置200通过光学探测器221、高速a/d采样和信号处理机解析激光场携带的信息,得到自身相对于激光扫描发射装置100的方位角和高度角,再激光测距机构230指向激光扫描发射装置100并发射测距激光脉冲,激光脉冲信号经脉冲上的脉冲返回至激光接收测距装置200,完成激光测距功能。
[0054]
本发明还公开了一种基于空间光通信的运动目标相对位置测量方法,使用上述的一种基于空间光通信的运动目标相对位置测量系统,包括以下步骤:
[0055]
通过激光扫描发射装置100在预定区域形成激光场区;当运动目标上的激光接收测距装置200检测到激光场区内的第一激光信号时,解析第一激光信号,并根据解析结果向激光扫描发射装置100的角反射器170发射第二激光信号;其中,第一激光信号中包含运动目标的导航信息;通过激光接收测距装置200接收反射后的第二激光信号;其中,第二激光信号发射后经过激光扫描发射装置100的角反射器170反射后,形成反射后的第二激光信号;根据反射后的第二激光信号计算测距信息。
[0056]
需要说明的是,上述方法的执行过程与信息交互等内容,由于与本发明系统实施例基于同一构思,其具体功能及带来的技术效果,具体可参见系统实施例部分,此处不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
