1.本发明属于一种磁控微型机器人技术方案,具体为一种双螺旋磁控微型机器人及其加工方法和应用,涉及手术及医疗器械技术领域。
背景技术:
2.目前在治疗由高血脂所引发的各类心脑血管疾病时,主要有服用溶栓类药物和进行溶栓手术这两种方式,但这两种治疗方式都存在着各自的弊端。服用药物极易使患者产生药物反应和过敏反应,引发各类相关疾病;同时,长期服用溶栓药物的患者在遭遇外伤时,出血风险显著高于常人、这对于患者的生命安全是一种极大的威胁。而采用溶栓手术则存在较高的治疗风险,可能会导致血管壁二次受损、加重远端肢体或脏器的缺血情况;血栓脱落后还会使二次栓塞和肺栓塞的风险加大,严重时会导致呼吸困难、造成更大的生命威胁。在此过程中,患者的痛苦加大,术后的康复周期延长、恢复过程缓慢。
3.近年来,随着微纳米技术的发展,磁控微型机器人技术日益成熟。由于这类磁控微型机器人的尺寸一般都在几微米至几毫米之间,可在较狭小的空间内工作、达到各种宏观机器人难以完成的任务要求,因此业内人士开始尝试将磁控微型机器人应用于靶向治疗心脑血管疾病。在这一使用场景中的磁控微型机器人,根据其任务目标的不同、会存在各种不同的形状,主要包括球形、螺旋形、u字形等等。
4.以现有技术中最为常见的单螺旋结构的磁控微型机器人为例,这类微型机器人能够在外部旋转磁场的驱动下、游动至患者血管中的血栓位置处,依靠自身旋转所产生的强扭矩,持续地“钻”动血栓,随着时间的推移,微型机器人会逐渐地“钻”开缺口并将聚团的黏性物质搅散,最终实现将血栓“钻”透的目的。
5.但是在实际的应用过程中,这类单螺旋结构的磁控微型机器人仍存在着较为显著的缺陷,主要体现在以下方面:首先,这单螺旋的结构设置使得其旋转时的状态并不稳定,很容易出现飘移、抖动,而且其与液体环境的接触面积较小,转动时的旋转扭矩和移动速度不足、难以“钻”开血栓;其次,现有的这类磁控微型机器人的外表面均为平滑面设计,这样会使得其在血液中移动时受到的阻力增大,不便于其发挥作用;最后,现有技术条件下为了更好的实现磁控过程,微型机器人在材质上会选用一些难以被降解、吸收的材料,这无疑进一步增加了患者术后恢复的负担。
6.综上所述,如果能够提出一种全新结构、全新材质的磁控微型机器人方案,以克服现有技术中的诸多缺陷,那么必将极大地提升其使用效果,保证高精度手术作业的顺利进行。
技术实现要素:
7.鉴于现有技术存在上述缺陷,本发明的目的是提出一种双螺旋磁控微型机器人及其加工方法和应用。
8.本发明揭示了一种双螺旋磁控微型机器人,设置有一作用端,包括一段中心部以
及两条螺旋部,两条所述螺旋部螺旋状盘绕于所述中心部的外周侧且沿所述中心部的中心轴线呈中心对称;
9.所述中心部在作用端一侧的端部设置有锥体结构,两条所述螺旋部在作用端一侧的端部均设置有导向面,所述导向面靠近所述中心部的一侧高于其远离所述中心部的一侧。
10.优选地,所述中心部为中心柱,两条所述螺旋部分别为第一螺旋叶片和第二螺旋叶片,所述第一螺旋叶片和所述第二螺旋叶片以中心对称的形式盘绕于所述中心柱的外周侧。
11.优选地,所述中心柱在作用端一侧的端部设置有圆锥结构,所述圆锥结构的中心轴线与所述中心柱的中心轴线相重合;
12.所述第一螺旋叶片和所述第二螺旋叶片在作用端一侧的端部均设置有导向面,所述导向面为至少一段平直斜面或平滑过渡的曲面。
13.优选地,所述中心柱的直径为6~12μm、整体长度为40~90μm;所述第一螺旋叶片与所述第二螺旋叶片相配合形成一个完整的双螺旋面结构,所述双螺旋面结构的圈数为1~3圈、螺距为20~80μm。
14.优选地,所述中心柱的直径为7μm、整体长度为75μm,所述双螺旋面结构的圈数为5/4圈、螺距为60μm。
15.优选地,所述中心柱、所述第一螺旋叶片和所述第二螺旋叶片三者的外表面均为非光滑表面,所述非光滑表面至少包括凹坑状表面、凸起状表面及不规则起伏状表面。
16.优选地,所述非光滑表面为凹坑状表面,所述中心柱、所述第一螺旋叶片和所述第二螺旋叶片三者的外表面均开设有多个凹坑结构;
17.每个所述凹坑结构的表面宽度为4~6μm、深度为2~4μm。
18.优选地,所述中心柱的外表面等距开设有30个凹坑结构,所述第一螺旋叶片和所述第二螺旋叶片二者外表面的每一侧均开设有两排所述凹坑结构、每排所述凹坑结构的数量为15个;
19.每个所述凹坑结构的表面宽度为6μm、深度为3μm。
20.本发明还揭示了一种双螺旋磁控微型机器人的加工方法,用于加工如上所述的双螺旋磁控微型机器人,包括如下步骤:
21.s1、将水凝胶材料与光引发剂加入去离子水中形成光刻胶预聚液;
22.s2、将所述光刻胶预聚液滴至透明玻片上,利用双光子光刻技术加工出微型机器人半成品;
23.s3、将所述微型机器人半成品浸泡到磁性悬浮液中,完成对所述微型机器人半成品的磁化加工,对已完成磁化加工的所述微型机器人半成品进行冲洗,得到双螺旋磁控微型机器人;
24.其中,s1包括,
25.s11、分别取gelma和hama混合形成水凝胶材料;
26.s12、取lap作为光引发剂,将所述水凝胶材料与所述光引发剂加入去离子水中形成光刻胶预聚液,在所述光刻胶预聚液中,gelma的浓度范围为10%~60%、hama的浓度范围为0.5%~2%、lap的浓度范围为0.5%~5%;
27.其中,s2包括,
28.使用移液枪抽取所述光刻胶预聚液滴到透明玻片中心处,并将所述透明玻片插入双光子光刻机中,利用双光子光刻技术加工出微型机器人半成品,光刻结束后取出所述透明玻片、移至去离子水中及逆行浸泡显影,使用去离子水冲洗所述透明玻片表面,得到微型机器人半成品;
29.其中,s3包括,
30.s31、将带有所述微型机器人半成品的所述透明玻片浸泡到磁性悬浮液中,使得所述磁性悬浮液内的磁性颗粒均匀的粘附在所述微型机器人半成品的表面,所述磁性悬浮液由磁性纳米颗粒与去离子水经过充分振荡、混匀而形成;
31.s32、在浸泡过程中,使用磁铁对所述微型机器人半成品进行磁化,使得磁化轴的方向与所述微型机器人半成品的长轴方向相垂直;
32.s33、浸泡完成后,取出所述透明玻片,使用去离子水反复冲洗所述微型机器人半成品、去除其表面残留的磁性纳米颗粒,得到双螺旋磁控微型机器人。
33.本发明还揭示了一种如上所述的双螺旋磁控微型机器人在心脑血管疾病手术中的应用。
34.本发明的优点主要体现在以下几个方面:
35.本发明所提出的一种双螺旋磁控微型机器人及其应用,通过双螺旋结构的设置,显著地增加了机器人本体与液体环境的接触面积,不仅保证了其转动过程的稳定性,避免了飘移、抖动现象的发生,而且使得其具有更大的旋转扭矩和移动速度、可以产生足够大的力去“钻”开血栓。同时,本发明借助不平整的外表面设计,有效地降低了其在液体环境中的运动阻力,实现了在血液等高粘度液体中的灵活、快速移动。此外,本发明的磁控微型机器人在材质选择上使用了容易被降解、吸收的材料,缩短了术后的康复时间,减轻了患者恢复的负担。
36.与上述硬件部分相对应的,本发明所提出的一种双螺旋磁控微型机器人的加工方法,能够以标准化、流程化的加工,高效且准确地实现上述硬件部分的技术方案,显著地提高了双螺旋磁控微型机器人的精确度和生产效率。
37.最后,本发明还为其他与磁控微型机器人相关的技术方案提供了参考,可以以此为依据进行拓展延伸和深入研究,方案整体具有十分广阔的应用前景。
38.以下便结合实施例附图,对本发明的具体实施方式作进一步的详述,以使本发明技术方案更易于理解、掌握。
附图说明
39.构成本技术的一部分的附图用来提供对本技术的进一步理解,使得本技术的其它特征、目的和优点变得更明显。本技术的示意性实施例附图及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
40.图1为本发明实施例提供的一种双螺旋磁控微型机器人的结构示意图;
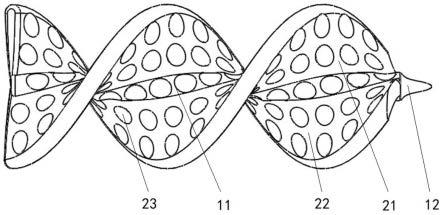
41.图2为本发明实施例提供的另一种双螺旋磁控微型机器人的结构示意图;
42.图3为如图2所示的、本发明实施例提供的另一种双螺旋磁控微型机器人的侧视图。
43.其中:11、中心柱;12、圆锥结构;21、第一螺旋叶片;22、第二螺旋叶片;23、凹坑结构。
具体实施方式
44.本发明揭示了一种应用于靶向治疗心脑血管疾病的双螺旋磁控微型机器人及其加工方法和应用,具体方案如下。
45.一方面,本发明的一种双螺旋磁控微型机器人,可应用于心脑血管疾病手术中,按照其作用原理、设置有一作用端。其结构方面包括一段中心部以及两条螺旋部,两条所述螺旋部螺旋状盘绕于所述中心部的外周侧且沿所述中心部的中心轴线呈中心对称,所述螺旋部的主要作用在于与液体环境进行相互作用获得旋进所需的推力及与粘性团块发生作用后向后侧排料。
46.为了使所述双螺旋磁控微型机器人在高转速的情况下具备较强的扭矩、在血管中克服高粘度血液的影响实现灵活移动,并对高粘度聚团物质形成的血栓进行钻孔和搅动,更准确地“钻”进血栓中进行切削,所述中心部在作用端一侧的端部设置有锥体结构,两条所述螺旋部在作用端一侧的端部均由环切加工形成有导向面,所述导向面靠近所述中心部的一侧高于其远离所述中心部的一侧。
47.通过以上结构的设置,一方面可以使得所述双螺旋磁控微型机器人可以利用旋转运动与液体产生相互作用获得前进的推力,另一方面也便于所述双螺旋磁控微型机器人在“钻”孔时向后排出黏性物质。该设计的工作原理类似于螺纹钻头钻孔的过程。
48.本发明一实施例的所述双螺旋磁控微型机器人,所述中心部为中心柱11,两条所述螺旋部分别为第一螺旋叶片21和第二螺旋叶片22,所述第一螺旋叶片21和所述第二螺旋叶片22以中心对称的形式盘绕于所述中心柱11的外周侧。
49.所述中心柱11在作用端一侧的端部设置有圆锥结构12,所述圆锥结构12的中心轴线与所述中心柱的中心轴线相重合。
50.所述第一螺旋叶片21和所述第二螺旋叶片22在作用端一侧的端部均设置有导向面,所述导向面为至少一段平直斜面或平滑过渡的曲面。其中所述导向面为平滑过渡的曲面时,其结构如图1所示,所述导向面为一段平直斜面时,其结构如图1~图2所示.
51.所述中心柱11的直径为6~12μm、整体长度为40~90μm。所述第一螺旋叶片21与所述第二螺旋叶片22相配合形成一个完整的螺旋面结构,所述螺旋面结构的圈数为2~3圈、螺距为20~30μm。
52.在本实施例的具体方案中,所述中心柱11的直径为7μm、整体长度为75μm,所述螺旋面结构的圈数为5/4圈、螺距为60μm。
53.本发明实施例中的所述双螺旋磁控微型机器人的外部尺寸基本与所述中心柱11的整体长度相当、约为75μm。其在液体环境中运动所受的雷诺数通常为10-4
~10-6
。在如此小尺度下,磁控微型机器人在液体中的惯性力可以忽略不计,所受到的力主要为粘滞阻力。因此,微型机器人要想实现液体环境中的快速移动,就需要对微型机器人的外形进行精巧地设计。考虑到螺旋形结构可以打破时间对称性产生旋转运动,是低雷诺数环境下最为理想的运动模型之一。结合本实施例中的磁控微型机器人要应用到清除血栓的任务中,所以此处选择了双螺旋的结构。
54.与现有技术中常见的单螺旋结构相比,双螺旋结构显著地增加了与液体环境的接触面积,使得其具有更大的旋转扭矩和移动速度、可以产生足够大的力去“钻”开血栓。由于双螺旋结构的旋转速度和位移速度是耦合的,所以双螺旋结构具有较大的位移速度。此外,本方案中所述中心柱11的直径也会对位移速度产生影响。所述中心柱11的直径越大则整个双螺旋结构就更接近于一个圆柱,在外径不变的情况下,螺旋面结构接触液体的面积就会减小、从而降低双螺旋结构的旋转速度和前进速度。所以尽可能地降低所述中心柱11的直径对于提高双螺旋结构的旋转速度乃至位移速度是有帮助的。
55.综合各方面因素而言,本方案中的双螺旋结构在运动轨迹方面更加稳定、横向偏移漂移更小,相较于单螺旋结构的横向漂移小了一个数量级;且旋转过程中的抖动也显著小于单螺旋结构。
56.所述中心柱11、所述第一螺旋叶片21和所述第二螺旋叶片22三者的外表面均为非光滑表面,所述非光滑表面至少包括凹坑状表面、凸起状表面及不规则起伏状表面。
57.在本实施例的具体方案中,所述非光滑表面为凹坑状表面。
58.进一步而言,所述中心柱11、所述第一螺旋叶片21和所述第二螺旋叶片22三者的外表面等距开设有多个凹坑结构23,所述凹坑结构23表面宽度为4~6μm、深度为2~4μm。
59.本方案之所以选用非光滑表面,是为了降低微型机器人的运动阻力。因为在微尺度的环境下,微型机器人主要会受到雷诺数流体粘滞力的影响,而自身在液体中的惯性力则可以忽略不计。
60.在表面做凹坑处理的理论依据源自于流体力学中固体表面疏水性会影响流过其表面的液体流动速度的理论。在微尺度下,微结构表面的粗糙度会改变表面的亲疏水性,当表面越粗糙时,即其表面积增大,在微小缝隙或凹陷处会留有更多的空气,当流体流过固体表面时,就会形成“固-气-液”的三相界面。气体存在的越多,固体表面的疏水性越好,流体流过固体表面的阻力越小,因此由相互作用力可知,固体在液体中移动的阻力也就越小。又因为当微型机器人的结构尺寸确定后,在不改变外部磁场的前提下,微型机器人存在着旋转速度的最大值,此时对应的外部磁场的旋转频率称之为截止频率。当继续增加磁场的旋转频率时,微型机器人就会出现剧烈的抖动,其旋转速度和前进速度都会有明显的下降,难以向前。然而经研究发现,双螺旋磁控微型机器人的最大速度与其表面的疏水性相关,表面疏水性越强,最大运动速度越高。这意味着微型机器人能够承受更大的外部磁场所施加的旋转频率,即微型机器人的最大旋转速度和最大前进速度都得以提高。经过表面凹坑处理的双螺旋磁控微型机器人与光滑表面的微型机器人相比,其运动性能得以提高。所以此处应当尽可能地在所述双螺旋磁控微形机器人的表面设置最多的凹坑结构23。
61.在本实施例的具体方案中,所述中心柱11的外表面等距开设有30个凹坑结构23,所述第一螺旋叶片21和所述第二螺旋叶片22二者外表面的每一侧均开设有两排所述凹坑结构23、每排所述凹坑结构23的数量为15个;每个所述凹坑结构23表面宽度为6μm、深度为3μm。
62.在突破血栓的过程中,微型机器人表面的凹坑结构23起到了降低运动阻力的作用,这是因为液体流过凹坑结构23表面时会产生疏水效应。当微型机器人高速旋转时,液体中的空气会进入到凹坑结构23内部产生一个很薄的空气层,分离了微型机器人的固体表面与周围液体。因此,微型机器人表面的疏水性增加,疏水性越强,则液体和固体表面的接触
角越大,反之接触角越小。由于低雷诺数环境中液体的粘滞阻力与液体和固体间的接触角有关,接触角越大,阻力越小。因此,对微型机器人的表面做凹坑结构23处理后,会降低微型机器人在运动时的运动阻力。又因为微型机器人的运动速度和表面疏水性也有关系,疏水性越强,运动速度越快,所以表面带有凹坑结构23的微型机器人的最大运动速度也相应的被提高。
63.综上,设置有凹坑结构23的双螺旋磁控微型机器人与光滑表面双螺旋磁控微型机器人相比,降低了的运动阻力,并提高了其最大运动速度。所以,设置有凹坑结构23的双螺旋磁控微型机器人具有更好的运动性能,微型机器人更不容易被黏性物质黏住,便于穿过血栓。
64.另一方面,本发明还揭示了一种如前文中所述的双螺旋磁控微型机器人在心脑血管疾病手术中的应用。
65.由以上方案可知,本发明所提出的一种双螺旋磁控微型机器人及其应用,通过双螺旋结构的设置,显著地增加了机器人本体与液体环境的接触面积,不仅保证了其转动过程的稳定性,避免了飘移、抖动现象的发生,而且使得其具有更大的旋转扭矩和移动速度、可以产生足够大的力去“钻”开血栓。同时,本发明借助不平整的外表面设计,有效地降低了其在液体环境中的运动阻力,实现了在血液等高粘度液体中的灵活、快速移动。此外,本发明的磁控微型机器人在材质选择上使用了容易被降解、吸收的材料,缩短了术后的康复时间,减轻了患者恢复的负担。
66.又一方面,本发明的一种双螺旋磁控微型机器人的加工方法,用于加工如前文中所述的双螺旋磁控微型机器人,包括如下步骤:
67.s1、将水凝胶材料与光引发剂加入去离子水中形成光刻胶预聚液。
68.s2、将所述光刻胶预聚液滴至透明玻片上,利用双光子光刻技术加工出微型机器人半成品。
69.s3、将所述微型机器人半成品浸泡到磁性悬浮液中,完成对所述微型机器人半成品的磁化加工,对已完成磁化加工的所述微型机器人半成品进行冲洗,得到双螺旋磁控微型机器人。
70.其中,s1包括:
71.s11、分别取gelma(甲基丙烯酸酐化明胶,由甲基丙烯酸酐(methylacrylic acid,ma)与明胶(gelatin)制成)和hama(甲基丙烯酰化透明质酸,由甲基丙烯酸酐(ma)与透明质酸(hyaluronic acid,ha)制备获得)混合形成光敏性生物水凝胶材料。
72.该材料具有优异的生物相容性,且可由紫外光或可见光激发固化反应,形成适于细胞生长与分化且有一定强度的三维结构。此外,为了使水凝胶能够在特定波长的光照下形成具有一定机械性能的微结构还需要在水凝胶中添加适量浓度的光引发剂。
73.s12、取lap(苯基-2,4,6-三甲基苯甲酰基亚磷酸锂)作为光引发剂,此处添加光引发剂是为了使水凝胶能够在特定波长的光照下形成具有一定机械性能的微结构,随后将所述水凝胶材料与所述光引发剂加入去离子水中形成光刻胶预聚液,在所述光刻胶预聚液中,gelma的浓度范围为10%~60%、hama的浓度范围为0.5%~2%,二者的浓度越高,固化后的微型机器人结构的机械性能越好,反之亦然。hama在本发明中起到了加强微型机器人结构机械性能的作用,可以在光固化过程中加强水凝胶混合物化学分子间的交联密度。lap
的浓度范围为0.5%~5%,光引发剂的浓度越高、成品对于光的敏感性越强,越容易在较低能量和较短时间的激光曝光下形成特定结构。
74.在一具体实施例的方案中,取gelma水凝胶絮状固体0.5g,hama 0.02g光引发剂lap(苯基-2,4,6-三甲基苯甲酰基亚磷酸锂)0.045g加入到1ml去离子水中(deionized water),形成光刻胶预聚液,其中gelma和lap的浓度分别为50%和4.5%,该浓度为本发明最优化的组合,但不仅限于此种组合。配置好的光刻胶预聚液需在4℃冰箱中避光保存。
75.其中,s2包括,
76.微型机器人的加工是基于双光子光刻技术来完成的,双光子光刻技术具有加工精度高和加工速度快的优势,加工精度可达150nm,平均30分钟即可加工上万个微纳米结构。我们事先使用三维设计软件solidworks对微型机器人进行结构设计,包括双螺旋结构的外部尺寸以及表面凹坑的外形尺寸。
77.使用移液枪抽取所述光刻胶预聚液滴到透明玻片中心处,并将所述透明玻片插入双光子光刻机中,利用双光子光刻技术加工出微型机器人半成品,光刻结束后取出所述透明玻片、移至去离子水中及逆行浸泡显影,使用去离子水冲洗所述透明玻片表面,得到微型机器人半成品。
78.在一具体实施例的方案中,用移液枪抽取100~200μl的光刻胶预聚液滴到透明玻片中心处,并将玻片插入到双光子光刻机中。本发明中所使用的加工参数为:激光能量40mw,激光打印速度10mm/s,加工的微型机器人数量为500个左右。光刻结束后,将玻片取出,并在40℃的去离子水中浸泡以显影。微型机器人的显影过程是利用光刻胶溶于水的特点来完成的。经过光刻后的微型机器人结构会粘附在玻片表面并保留在液滴内部,未经过光刻的液滴呈胶状流动状态并可溶于水,且温度越高溶解速度越快。浸泡约20min后即可取出玻片,再用滴管加去离子水缓慢轻柔地冲洗玻片表面以得到干净的微型机器人结构。
79.其中,s3包括,
80.s31、将带有所述微型机器人半成品的所述透明玻片浸泡到磁性悬浮液中,使得所述磁性悬浮液内的磁性颗粒均匀的粘附在所述微型机器人半成品的表面,所述磁性悬浮液由磁性纳米颗粒与去离子水经过充分振荡、混匀而形成。
81.s32、在浸泡过程中,使用磁铁对所述微型机器人半成品进行磁化,使得磁化轴的方向与所述微型机器人半成品的长轴方向相垂直。
82.s33、浸泡完成后,取出所述透明玻片,使用去离子水反复冲洗所述微型机器人半成品、去除其表面残留的磁性纳米颗粒,得到双螺旋磁控微型机器人。
83.在一具体实施例的方案中,将清洗好的带有微型机器人结构的玻片浸泡到磁性悬浮液中,使得悬浮液中的磁性颗粒均匀地粘附在机器人的表面,同时在培养皿底部放置圆形磁铁以对微型机器人进行磁化,使得磁化轴的方向与微型机器人长轴方向相垂直。
84.所述磁性悬浮液的配置过程为:称取pvp@fe3o4磁性纳米颗粒(粒径50nm)0.1g,加入到10ml去离子水中,经过充分振荡和混匀形成浓度为1%的磁性悬浮液。
85.浸泡30min后,将玻片取出,用装有的去离子水的滴管反复、缓慢、轻柔地冲洗微结构的表面2~3次以去除未粘附在微型机器人表面的磁性颗粒残留。最终,我们将磁化后的微型机器人放入无菌箱中进行保存待用。
86.为了验证微机器人的生物兼容性和生物降解性,本方案中也进行了相关实验。
87.生物兼容性方面,采用了将小鼠胚胎成纤维细胞(nih-3t3细胞,一种广泛使用的生物兼容性测试细胞)和微机器人共培养的方式进行细胞活性监测和成活率测定,在共培养三天后发现细胞可爬满微机器人的表面、细胞成活率达95%以上。
88.生物降解性方面,将微机器人放入含有胶原酶的溶液中,在37℃左右的温度下进行降解实验。胶原酶是人体中能够自发产生用来分解蛋白质等有机物的酶,其通常浓度在0.1mg/ml~0.5mg/ml。实验中所使用的胶原酶浓度为0.3mg/ml,约200min后,微机器人可被完全分解。
89.与前文中硬件部分相对应的,本发明所提出的一种双螺旋磁控微型机器人的加工方法,能够以标准化、流程化的加工,高效且准确地实现上述硬件部分的技术方案,显著地提高了双螺旋磁控微型机器人的精确度和生产效率。
90.综上所述,本发明还为其他与磁控微型机器人相关的技术方案提供了参考,可以以此为依据进行拓展延伸和深入研究,方案整体具有十分广阔的应用前景。
91.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神和基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
92.最后,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。