技术特征:
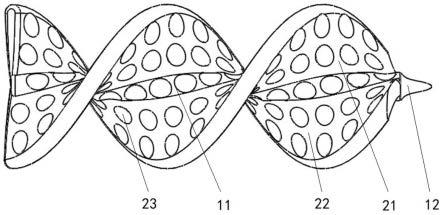
1.一种双螺旋磁控微型机器人,设置有一作用端,其特征在于:包括一段中心部以及两条螺旋部,两条所述螺旋部螺旋状盘绕于所述中心部的外周侧且沿所述中心部的中心轴线呈中心对称;所述中心部在作用端一侧的端部设置有锥体结构,两条所述螺旋部在作用端一侧的端部均设置有导向面,所述导向面靠近所述中心部的一侧高于其远离所述中心部的一侧。2.根据权利要求1所述的双螺旋磁控微型机器人,其特征在于:所述中心部为中心柱(11),两条所述螺旋部分别为第一螺旋叶片(21)和第二螺旋叶片(22),所述第一螺旋叶片(21)和所述第二螺旋叶片(22)以中心对称的形式盘绕于所述中心柱(11)的外周侧。3.根据权利要求2所述的双螺旋磁控微型机器人,其特征在于:所述中心柱(11)在作用端一侧的端部设置有圆锥结构(12),所述圆锥结构(12)的中心轴线与所述中心柱的中心轴线相重合;所述第一螺旋叶片(21)和所述第二螺旋叶片(22)在作用端一侧的端部均设置有导向面,所述导向面为至少一段平直斜面或平滑过渡的曲面。4.根据权利要求3所述的双螺旋磁控微型机器人,其特征在于:所述中心柱(11)的直径为6~12μm、整体长度为40~90μm;所述第一螺旋叶片(21)与所述第二螺旋叶片(22)相配合形成一个完整的双螺旋面结构,所述双螺旋面结构的圈数为1~3圈、螺距为20~80μm。5.根据权利要求4所述的双螺旋磁控微型机器人,其特征在于:所述中心柱(11)的直径为7μm、整体长度为75μm,所述双螺旋面结构的圈数为5/4圈、螺距为60μm。6.根据权利要求2所述的双螺旋磁控微型机器人,其特征在于:所述中心柱(11)、所述第一螺旋叶片(21)和所述第二螺旋叶片(22)三者的外表面均为非光滑表面,所述非光滑表面至少包括凹坑状表面、凸起状表面及不规则起伏状表面。7.根据权利要求6所述的双螺旋磁控微型机器人,其特征在于:所述非光滑表面为凹坑状表面,所述中心柱(11)、所述第一螺旋叶片(21)和所述第二螺旋叶片(22)三者的外表面均开设有多个凹坑结构(23);每个所述凹坑结构(23)的表面宽度为4~6μm、深度为2~4μm。8.根据权利要求7所述的双螺旋磁控微型机器人,其特征在于:所述中心柱(11)的外表面等距开设有30个凹坑结构(23),所述第一螺旋叶片(21)和所述第二螺旋叶片(22)二者外表面的每一侧均开设有两排所述凹坑结构(23)、每排所述凹坑结构(23)的数量为15个;每个所述凹坑结构(23)的表面宽度为6μm、深度为3μm。9.一种双螺旋磁控微型机器人的加工方法,用于加工如权利要求1~8任一所述的双螺旋磁控微型机器人,其特征在于,包括如下步骤:s1、将水凝胶材料与光引发剂加入去离子水中形成光刻胶预聚液;s2、将所述光刻胶预聚液滴至透明玻片上,利用双光子光刻技术加工出微型机器人半成品;s3、将所述微型机器人半成品浸泡到磁性悬浮液中,完成对所述微型机器人半成品的磁化加工,对已完成磁化加工的所述微型机器人半成品进行冲洗,得到双螺旋磁控微型机器人;其中,s1包括,s11、分别取gelma和hama混合形成水凝胶材料;
s12、取lap作为光引发剂,将所述水凝胶材料与所述光引发剂加入去离子水中形成光刻胶预聚液,在所述光刻胶预聚液中,gelma的浓度范围为10%~60%、hama的浓度范围为0.5%~2%、lap的浓度范围为0.5%~5%;其中,s2包括,使用移液枪抽取所述光刻胶预聚液滴到透明玻片中心处,并将所述透明玻片插入双光子光刻机中,利用双光子光刻技术加工出微型机器人半成品,光刻结束后取出所述透明玻片、移至去离子水中及逆行浸泡显影,使用去离子水冲洗所述透明玻片表面,得到微型机器人半成品;其中,s3包括,s31、将带有所述微型机器人半成品的所述透明玻片浸泡到磁性悬浮液中,使得所述磁性悬浮液内的磁性颗粒均匀的粘附在所述微型机器人半成品的表面,所述磁性悬浮液由磁性纳米颗粒与去离子水经过充分振荡、混匀而形成;s32、在浸泡过程中,使用磁铁对所述微型机器人半成品进行磁化,使得磁化轴的方向与所述微型机器人半成品的长轴方向相垂直;s33、浸泡完成后,取出所述透明玻片,使用去离子水反复冲洗所述微型机器人半成品、去除其表面残留的磁性纳米颗粒,得到双螺旋磁控微型机器人。10.一种根据权利要求1~8任一所述的双螺旋磁控微型机器人在心脑血管疾病手术中的应用。
技术总结
本发明揭示了一种双螺旋磁控微型机器人及其加工方法和应用,硬件部分设置有一作用端,包括一段中心部以及两条螺旋部,两条螺旋部螺旋状盘绕于中心部的外周侧且沿中心部的中心轴线呈中心对称;中心部在作用端一侧的端部设置有锥体结构,两条螺旋部在作用端一侧的端部均设置有导向面,导向面靠近中心部的一侧高于其远离中心部的一侧。本发明通过双螺旋结构的设置,显著地增加了机器人本体与液体环境的接触面积,不仅保证了其转动过程的稳定性,避免了飘移、抖动现象的发生,而且使得其具有更大的旋转扭矩和移动速度、可以产生足够大的力去“钻”开血栓。开血栓。开血栓。
技术研发人员:王化平 侯尧珍 孙立文 王茂霖 钟世豪 裘宇康 石青 黄强 福田敏男
受保护的技术使用者:北京理工大学
技术研发日:2022.03.24
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。