1.本发明涉及一种高尔夫挥杆解析系统、高尔夫挥杆解析方法及信息存储媒体。
背景技术:
2.专利文献1中记载有一种技术,显示由正在挥动高尔夫球杆的球手的两肩的倾斜、手腕的位置、站姿的中心位置、站姿的宽度、挥杆平面角度等要素生成的柱状图。
3.[背景技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利特开2014-186168号公报
技术实现要素:
[0006]
[发明要解决的问题]
[0007]
即便采用专利文献1所记载的技术,不具备高尔夫相关知识,比如合适的挥杆平面角度的范围等的普通球手依然无法了解到挥杆是否正确。
[0008]
本发明即鉴于所述问题研发获得,其目的之一在于,提供一种能让球手容易地了解到挥杆是否正确的高尔夫挥杆解析系统、高尔夫挥杆解析方法及信息存储媒体。
[0009]
[解决问题的技术手段]
[0010]
本发明的高尔夫挥杆解析系统包含:摄影动态图像获取装置,获取显映正在挥动高尔夫球杆的球手的摄影动态图像;基准角度确定装置,基于依据所述摄影动态图像而确定出的瞄球时所述球手的指定的身体部位的位置、或瞄球时杆身的位置中的至少一者,确定至少1个基准角度;下挥杆角度确定装置,基于所述摄影动态图像,确定所述摄影动态图像上显映的杆头的下挥杆角度;及比较装置,将所述基准角度与所述下挥杆角度加以比较。
[0011]
在本发明的一形态中,所述高尔夫挥杆解析系统还包含挥杆轨道种类确定装置,该挥杆轨道种类确定装置基于所述基准角度与所述下挥杆角度的比较结果,确定所述挥杆中挥杆轨道的种类。
[0012]
在该形态中,也可为:所述基准角度确定装置基于所述指定的身体部位的位置,确定第1所述基准角度,所述基准角度确定装置基于所述杆身的位置,确定第2所述基准角度,所述挥杆轨道种类确定装置基于所述第1所述基准角度、所述第2所述基准角度及所述下挥杆角度,确定所述挥杆中挥杆轨道是inside-out(由内向外的挥杆轨道)、inside-in(由内向内的挥杆轨道)或outside-in(由外向内的挥杆轨道)中的哪一种。
[0013]
另外,在本发明的一形态中,所述基准角度确定装置基于依据所述摄影动态图像而确定出的所述指定的身体部位的位置、及挥杆前球的位置,确定所述基准角度。
[0014]
在该形态中,也可为:所述高尔夫挥杆解析系统还包含球弹道确定装置,该球弹道确定装置基于所述摄影动态图像,确定所述摄影动态图像上显映的球的弹道;且所述基准角度确定装置基于依据所述弹道而确定出的挥杆前球的位置,确定所述基准角度。
[0015]
另外,在本发明的一形态中,所述基准角度确定装置确定所述摄影动态图像的二
维图像坐标系中呈现的所述基准角度,所述下挥杆角度确定装置确定所述摄影动态图像的二维图像坐标系中呈现的所述下挥杆角度。
[0016]
另外,在本发明的一形态中,所述摄影动态图像获取装置获取显映从球的目标方向后方观察到的所述球手的状况的所述摄影动态图像。
[0017]
另外,在本发明的一形态中,也可为:所述高尔夫挥杆解析系统还包含生成解析动态图像的解析动态图像生成装置,该解析动态图像由表示所述基准角度的线重叠于所述摄影动态图像所形成。
[0018]
另外,本发明的高尔夫挥杆解析方法包含如下步骤:获取显映正在挥动高尔夫球杆的球手的摄影动态图像;基于依据所述摄影动态图像而确定出的瞄球时所述球手的指定的身体部位的位置、或瞄球时杆身的位置中的至少一者,确定至少1个基准角度;基于所述摄影动态图像,确定所述摄影动态图像上显映的杆头的下挥杆角度;及将所述基准角度与所述下挥杆角度加以比较。
[0019]
另外,本发明的信息存储媒体存储有使计算机执行如下操作的程序,所述操作是指,获取显映正在挥动高尔夫球杆的球手的摄影动态图像;基于依据所述摄影动态图像而确定出的瞄球时所述球手的指定的身体部位的位置、或瞄球时杆身的位置中的至少一者,确定至少1个基准角度;基于所述摄影动态图像,确定所述摄影动态图像上显映的杆头的下挥杆角度;及将所述基准角度与所述下挥杆角度加以比较。
附图说明
[0020]
图1是表示本发明的一实施方式的用户终端的构成的一例的图。
[0021]
图2是表示解析动态图像中包含的帧图像的一例的图。
[0022]
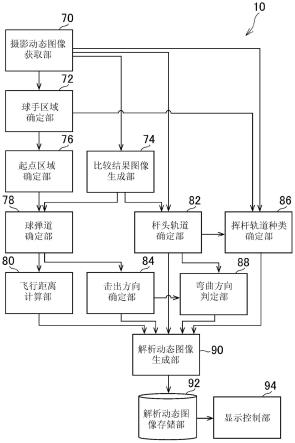
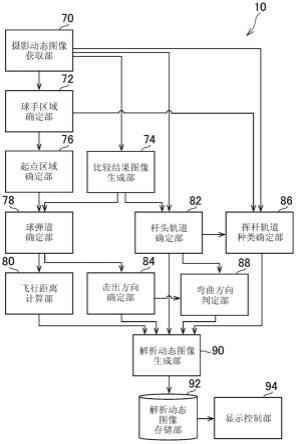
图3是表示本发明的一实施方式的用户终端的功能的一例的功能框图。
[0023]
图4是表示球手区域的一例的图。
[0024]
图5是表示比较结果图像的一例的图。
[0025]
图6是表示起点区域的一例的图。
[0026]
图7是表示候补球位置的一例的图。
[0027]
图8是表示弹道列表候补的一例的图。
[0028]
图9是表示候补球位置的一例的图。
[0029]
图10是表示弹道列表候补的一例的图。
[0030]
图11是表示候补球位置的一例的图。
[0031]
图12是表示弹道列表候补的一例的图。
[0032]
图13是表示顶点位置帧图像的一例的图。
[0033]
图14是表示击球瞬间帧图像的一例的图。
[0034]
图15是说明左右角度绝对值与弯曲角度绝对值的一例的说明图。
[0035]
图16是表示杆头检测区域的一例的图。
[0036]
图17是是表示挥杆路径角度的一例的图。
[0037]
图18是表示击出角度的一例的图。
[0038]
图19是表示基准角度的一例的图。
[0039]
图20是表示下挥杆角度的一例的图。
[0040]
图21是表示击球瞬间图像的变化的一例的图。
[0041]
图22是表示在本发明的一实施方式的用户终端上进行的处理流程的一例的流程图。
具体实施方式
[0042]
以下,基于附图详细说明本发明的一实施方式。
[0043]
图1是表示本发明的一实施方式的用户终端10的构成的一例的图。
[0044]
本实施方式的用户终端10是手机(包括智能手机)、移动信息终端(包括平板型计算机)等计算机。如图1所示,本实施方式的用户终端10包含处理器20、存储部22、通信部24、触控面板26、相机部28、传感部30。
[0045]
处理器20例如为根据用户终端10中安装的程序而动作的微处理器等程序控制元件。存储部22例如为rom(read only memory,只读存储器)或ram(random access memory,随机存取存储器)等存储元件、或者固态驱动器(ssd)等。存储部22中存储由处理器20加以执行的程序等。通信部24例如为用于有线通信或无线通信的通信接口,经由因特网等计算机网络,与服务器等计算机之间收发数据。
[0046]
触控面板26例如根据从处理器20输入的指示而显示输出信息,或向处理器20输出用户所进行的操作的内容。
[0047]
相机部28例如为能拍摄出动态图像的数字录影机等摄影元件。
[0048]
传感部30例如为gps(global positioning system,全球定位系统)模块、加速度传感器、运动传感器等传感元件。此外,本实施方式中,将对传感部30包含于用户终端10的情况进行说明,但其实传感部30也可位于用户终端10的外部。
[0049]
本实施方式中,例如,操作用户终端10的用户(以下,称为操作用户)在高尔夫球场或高尔夫训练场上,使用用户终端10的相机部28拍摄正在挥动高尔夫球杆的球手。然后,生成显映该正在挥动球杆的球手的动态图像。
[0050]
此外,本实施方式中,在对挥杆进行拍摄之前,会先进行用户终端10的位置及倾斜的调整,使球手的位置相对于相机部28的位置来说,处于指定的容许范围内,且球手的方向相对于拍摄方向来说,处于指定的容许范围内。然后,本实施方式中,若进行用户终端10的调整后,操作用户实施指定操作,则由相机部28对球手进行拍摄,而生成显映该正在挥动球杆的球手的动态图像。本实施方式中,生成指定帧率(例如60fps)的动态图像。
[0051]
然后,本实施方式中,对如此生成的动态图像执行抖动校正处理,由此将各帧图像校正为所有帧图像中球手皆显映于大致相同的位置。以下,将经过该抖动校正处理后的动态图像称为摄影动态图像。本实施方式中,所生成的摄影动态图像中包含的帧图像的纵横像素数全部相同。
[0052]
以下,将帧编号为n(n=1、2、3、
···
)的帧图像记载为帧图像(n)。另外,将与帧图像(n)对应的帧记载为第n帧。
[0053]
然后,本实施方式中,对摄影动态图像进行挥杆解析处理。然后,生成由表示该挥杆解析处理的结果的图像重叠于摄影动态图像所形成的解析动态图像。然后,使所生成的解析动态图像存储于用户终端10的存储部22中。
[0054]
然后,例如所述球手或操作用户等用户终端10的用户酌情实施指定操作,由此能
播放存储部22中存储的解析动态图像。
[0055]
图2是表示所播放的解析动态图像中包含的收杆(finish)时的帧图像的一例的图。图2所示的帧图像是在拍摄球手40所得的摄影动态图像中包含的帧图像上重叠表示杆头的轨道的杆头轨道效果图像42、及表示球的轨道的球轨道效果图像44所形成的。
[0056]
另外,在图2所示的帧图像的右上方,配置有解析结果信息46。在图2的例子中,作为解析结果信息46,配置有球速、飞行距离及outside-in(由外向内的挥杆轨道)、inside-in(由内向内的挥杆轨道)、inside-out(由内向外的挥杆轨道)等表示挥杆轨道的种类的字符串。
[0057]
另外,在图2所示的帧图像的左下方,配置有呈现出杆头轨道、击球瞬间杆面的方向、及球的弯曲方向的击球瞬间图像48。
[0058]
图2所示的击球瞬间图像48中包含杆头移动方向图像50、杆面方向图像52及球方向图像54。杆头移动方向图像50例如为表示击球瞬间杆头的移动方向的图像,在图2的例子中,箭头排列的方向相当于击球瞬间杆头的移动方向。杆面方向图像52例如为表示击球瞬间杆面的方向的图像,在图2的例子中,杆面方向图像52为线上的图像,杆面方向图像52的延伸方向相当于击球瞬间杆面的方向。球方向图像54例如为表示球的飞出方向及弯曲方向的图像。在本实施方式的球方向图像54中,与线上的杆面方向图像52的延伸方向垂直的方向被标示为球的飞出方向。
[0059]
另外,图2所示的帧图像中包含v字区图像56,该v字区图像56表示下挥杆时希望杆头轨道通过的v字区。
[0060]
如此,根据本实施方式,用户终端10的用户能确认到球手所进行的高尔夫挥杆的解析结果。
[0061]
以下,围绕所述挥杆解析处理,对本实施方式的用户终端10的功能、及在本实施方式的用户终端10上执行的处理进一步加以说明。
[0062]
图3是表示在本实施方式的用户终端10上实现的功能的一例的功能框图。此外,在本实施方式的用户终端10上,无需实现图3所示的所有功能,另外也可实现图3所示的功能以外的功能。
[0063]
本实施方式的用户终端10具有作为对高尔夫的挥杆进行解析的挥杆解析系统的功能。而且,如图3所示,从功能上来说,本实施方式的用户终端10中例如包含摄影动态图像获取部70、球手区域确定部72、比较结果图像生成部74、起点区域确定部76、球弹道确定部78、飞行距离计算部80、杆头轨道确定部82、击出方向确定部84、挥杆轨道种类确定部86、弯曲方向判定部88、解析动态图像生成部90、解析动态图像存储部92、显示控制部94。
[0064]
摄影动态图像获取部70、球手区域确定部72、比较结果图像生成部74、起点区域确定部76、球弹道确定部78、飞行距离计算部80、杆头轨道确定部82、击出方向确定部84、挥杆轨道种类确定部86、弯曲方向判定部88、解析动态图像生成部90主要由处理器20实现。解析动态图像存储部92主要由存储部22实现。显示控制部94主要由处理器20及触控面板26实现。
[0065]
以上功能也可通过在用户终端10上执行程序来实现,该程序安装在作为计算机的用户终端10中,包含与以上功能对应的指令。另外,该程序也可经由例如光盘、磁盘、磁带、磁光盘等可由计算机加以读取的信息存储媒体,或经由因特网等向用户终端10提供。
[0066]
本实施方式中,摄影动态图像获取部70例如获取显映正在挥动高尔夫球杆的球手40的摄影动态图像。这里,如上所述,也可获取经过抖动校正处理后的摄影动态图像。
[0067]
另外,如图2所示,摄影动态图像也可为从一方向拍摄球手40所得的动态图像。另外,摄影动态图像还可为显映从球的目标方向后方观察到的球手40的状况的动态图像。
[0068]
如上所述,本实施方式中,获取以指定帧率(例如,60fps)拍摄所得的摄影动态图像。
[0069]
本实施方式中,球手区域确定部72例如确定摄影动态图像中包含的帧图像内显映球手40的区域,即图4中所例示的球手区域96。
[0070]
这里,例如,本实施方式的用户终端10中也可安装有open pose等预训练机械学习模型。而且,球手区域确定部72也可通过使用该预训练机械学习模型,而确定帧图像内表示球手40的骨架(bone)的骨架模型98的节点或链接的位置。图4所示的骨架模型98中包含的多个节点的位置分别与例如肩或腰等球手40的身体部位的位置相对应。
[0071]
球手区域确定部72也可将位置、形状及大小基于骨架模型98而确定的矩形区域确定为球手区域96。例如,可将使与骨架模型98外接的矩形区域中心位置不变地以指定倍率扩大所得的区域确定为球手区域96。
[0072]
这里,也可基于作为代表的1个帧图像,确定球手区域96。另外,还可基于多个帧图像,确定球手区域96。该情况下,可将针对多个帧图像而确定出的矩形区域的共通区域或平均区域等代表针对多个帧图像而确定出的矩形区域的区域确定为球手区域96。
[0073]
另外,在球手以外的人物被摄入摄影动态图像中的情况等下,会确定多个球手区域96的候补。该情况下,可基于区域的尺寸、与帧图像的中心相距的距离、区域的高度与宽度的比率等给定的条件,将任一个候补确定为球手区域96。
[0074]
本实施方式中,比较结果图像生成部74例如基于摄影动态图像,使用图像差分法等,而生成图5中所例示的比较结果图像。
[0075]
本实施方式中,针对摄影动态图像中包含的多个帧图像,分别生成与该帧图像相对应的比较结果图像。例如,针对帧图像(n),生成比较结果图像(n)作为对应的比较结果图像。
[0076]
比较结果图像生成部74例如也可通过将连续的指定个帧图像(例如,20帧)的帧图像平滑化,而生成比较图像。例如,可通过将摄影动态图像中包含的帧图像(n-20)至帧图像(n-1)这20个帧图像平滑化,而生成比较图像(n)。例如,也可针对各像素,将帧图像(n-20)至帧图像(n-1)这些帧图像中与该像素对应的像素的像素值的平均值设定为该像素的像素值,而生成比较图像(n)。
[0077]
然后,比较结果图像生成部74针对彼此相对应的各像素,算出所述指定个帧图像的下一个帧图像即帧图像(n)中的像素值与所述比较对象图像(n)中的像素值的差。然后,比较结果图像生成部74生成针对各像素表示帧图像(n)与比较对象图像(n)的像素值的差是否为指定值以上的比较结果图像(n)。在图5所示的比较结果图像中,像素值的差为指定值以上的像素呈现为白色,小于指定值的像素呈现为黑色。以下,将像素值的差为指定值以上的像素,即在图5所示的比较结果图像中呈现为白色的像素称为变化像素。
[0078]
此外,本实施方式中,在如上所述基于20个帧图像生成比较图像的情况下,对于帧图像(21)以后的帧图像,会生成与该帧图像相对应的比较结果图像。
[0079]
本实施方式中,起点区域确定部76例如确定图6中所例示的起点区域100,该起点区域100会在下述球弹道确定部78确定球的弹道时使用。
[0080]
本实施方式的起点区域100例如为基于球手区域96而唯一确定的矩形区域。这里,例如,起点区域100的左边的位置与帧图像的左边的位置可为相同的位置,且起点区域100的右边的位置与帧图像的右边的位置可为相同的位置。另外,起点区域100的上边的位置可为从球手区域96的上边向下移动球手区域96的上下方向的长度的30%的位置。另外,起点区域100的下边的位置可为与球手区域96的下边的位置相同的位置、或通过球手40的脚下的位置。此外,该方法仅为起点区域100的确定方法的一例,也可采用其他方法来确定起点区域100。
[0081]
本实施方式中,球弹道确定部78例如基于摄影动态图像,确定该摄影动态图像上显映的球的弹道。
[0082]
本实施方式中,针对摄影动态图像中包含的多个帧图像,使该帧图像内显映球的位置相互建立关联而形成列表,将该列表确定为球的弹道。以下,将该列表称为弹道列表。
[0083]
以下,参照图7~图12,对球弹道确定部78确定球的弹道的处理的一例进行说明。
[0084]
如上所述,对于帧图像(21)以后的帧图像,会生成与该帧图像相对应的比较结果图像。该情况下,针对比较结果图像(21)以后的比较结果图像,要确定出至少1个位于指定区域内的变化像素的像素集即指定个像素的范围。然后,针对这些像素集,确定出代表点(例如中心)的位置作为候补球位置。
[0085]
这里,例如,在截至比较结果图像(n-1)为止的结果图像中未确定出候补球位置,而在比较结果图像(n)中确定出了图7所示的3个候补球位置(p(n,a)、p(n,b)及p(n,c))。
[0086]
然后,进行作为弹道列表的候补(以下,称为弹道列表候补)的第一个要素的候补球位置的锁定。例如,位于起点区域100之外的候补球位置被排除在候补球位置之外。以此方式,p(n,a)被排除在作为第一个要素的候补球位置之外,而p(n,b)及p(n,c)被锁定为作为第一个要素的候补球位置。
[0087]
该情况下,如图8所示,分别具有1个要素的p(n,b)及p(n,c)被确定为弹道列表候补。
[0088]
然后,在比较结果图像(n 1)中,确定出图9所示的3个候补球位置(p(n 1,a)、p(n 1,b)及p(n 1,c))。
[0089]
此外,图9中除了这些候补球位置以外,还示出了未被排除在候补球位置之外的p(n,b)及p(n,c)。
[0090]
该情况下,位于起点区域100之外的p(n 1,a)被排除在作为第一个要素的候补球位置之外。而p(n 1,b)及p(n 1,c)被锁定为作为第一个要素的候补球位置。
[0091]
另外,在已有弹道列表候补存在的状况下,还要确定与现有的弹道列表候补相关联的候补球位置。
[0092]
例如,从p(n 1,a)、p(n 1,b)及p(n 1,c)中,确定出与p(n,b)相关联的候补球位置。例如,将满足与p(n,b)相距的长度大于指定长度、与p(n,b)相距的长度小于指定长度、位置比p(n,b)靠下等指定条件者排除在与p(n,b)相关联的候补球位置之外。例如,p(n 1,c)因为位置比p(n,b)靠下,所以被排除在候补球位置之外。而p(n 1,a)及p(n 1,b)被锁定为与p(n,b)相关联的候补球位置。
[0093]
以同样的方式,从p(n 1,a)、p(n 1,b)及p(n 1,c)中,确定出与p(n,c)相关联的候补球位置。这里,例如,p(n 1,c)因为位置比p(n,c)靠下,所以被排除在候补球位置之外。而p(n 1,a)及p(n 1,b)被锁定为与p(n,c)相关联的候补球位置。
[0094]
然后,如图10所示,追加弹道列表候补。在所述例子中,将p(n 1,b)、p(n 1,c)、p(n,b)-p(n 1,a)、p(n,b)-p(n 1,b)、p(n,c)-p(n 1,a)、p(n,c)-p(n 1,b)追加至弹道列表候补中。图10中还示出了包含彼此相关联的多个候补球位置的弹道候补列表。例如,包含要素p(n,b)及要素p(n 1,a)的弹道列表候补被作为p(n,b)-p(n 1,a)标示于图10中。此外,图8所示的p(n,b)及p(n,c)未被覆盖,而残留于弹道列表候补中。
[0095]
然后,在比较结果图像(n 2)中,确定出图11所示的2个候补球位置(p(n 2,a)及p(n 2,b))。
[0096]
此外,图11中除了这些候补球位置以外,还示出了未被排除在外的候补球位置。其中,位于起点区域100之外的p(n 2,a)被排除在作为第一个要素的候补球位置之外。而p(n 2,b)被锁定为起点的候补球位置。
[0097]
另外,会以所述方式确定与具有1个要素的弹道列表候补相关联的候补球位置。例如,p(n 2,b)因为与p(n,c)相距的长度小于指定长度,所以被排除在与p(n,c)相关联的候补球位置之外。另外,p(n 2,a)因为与p(n 1,c)相距的长度大于指定长度,所以被排除在与p(n 1,c)相关联的候补球位置之外。
[0098]
另外,自此还会确定与具有多个要素的弹道列表候补相关联的候补球位置。该情况下,也可将满足如下等指定条件者排除在与弹道列表候补相关联的候补球位置之外:与作为弹道列表候补的最后一个要素的候补球位置相距的长度大于指定长度;与作为弹道列表候补的最后一个要素的候补球位置相距的长度小于指定长度;所处位置比作为弹道列表候补的最后一个要素的候补球位置靠下。
[0099]
另外,除了这些条件以外,还可将满足如下等与包含多个要素的弹道列表候补相关的指定条件者排除在与弹道列表候补相关联的候补球位置之外,例如:弹道的角度突然改变(按指定角度以上弯曲);弹道的速度突然改变(缩小或增加指定长度以上);弹道的方向改变(向右的弹道改为向左,或向左的弹道改为向右)。
[0100]
在图11的例子中,p(n 2,a)因为相对于将p(n,b)与p(n 1,b)连结的弹道来说,弹道的角度突然改变,所以被排除在与p(n,b)-p(n 1,b)相关联的候补球位置之外。另外,p(n 2,a)因为相对于将p(n,c)与p(n 1,a)连结的弹道来说,弹道的速度突然变慢,所以被排除在与p(n,c)-p(n 1,a)相关联的候补球位置之外。
[0101]
例如,如图12所示,以此方式追加5个弹道列表候补。这里,如p(n,b)-p(n 2,a)、p(n,c)-p(n 2,a)般,与弹道列表候补中包含的彼此相关联的2个要素分别对应的帧也可不连续。其中,例如,也可将从与弹道列表候补的最后一个要素对应的帧隔开指定个帧(例如,4帧)以上的候补球位置排除在与该弹道列表候补相关联的候补球位置之外。
[0102]
本实施方式中,以如上方式确定多个弹道列表候补。然后,从这些弹道列表候补中,选择弹道列表候补中包含的要素(候补球位置)的数量最多者,将其确定为弹道列表。以下,将所确定出的弹道列表中包含的要素即候补球位置称为弹道球位置。
[0103]
这里,例如,也可按照其他基准确定弹道列表。例如,也可将表示最接近于直线的弹道的弹道列表候补确定为弹道列表。
[0104]
此外,以如上方式,通常会确定击球瞬间之后的大致50帧左右的弹道球位置,而不会确定截至弹着点为止的所有帧的弹道球位置。
[0105]
然后,球弹道确定部78基于以如上方式确定出的各帧中的弹道球位置,进行例如直线推定,由此确定摄影动态图像的图像二维坐标系中呈现的球的弹道的轨迹。
[0106]
然后,使所确定出的轨迹朝下方向延伸并进行外插,由此将相当于帧图像内上下方向的位置位于指定位置的时序的帧编号确定为相当于击球瞬间的时序的帧编号。本实施方式中,例如,以如103.195般比整数更精细的单位确定帧编号。以下,将与如此确定出的帧编号对应的帧称为击球瞬间帧。
[0107]
然后,球弹道确定部78确定被击打前球的位置(以下,称为初始位置)。例如,球弹道确定部78确定击球瞬间帧的前一帧及后一帧的帧图像。例如,在击球瞬间帧的帧编号为103.195的情况下,帧编号为103的帧相当于击球瞬间帧的前一帧,帧编号为104的帧相当于击球瞬间帧的后一帧。在该情况下,将帧图像(103)确定为击球瞬间帧的前一帧的帧图像。另外,将帧图像(104)确定为击球瞬间帧的后一帧的帧图像。
[0108]
然后,球弹道确定部78将这2个帧图像加以比较,由此检测击球瞬间之前的帧图像中存在,但击球瞬间之后的帧图像中不存在的物体。然后,球弹道确定部78将所检测出的物体的位置确定为初始位置。
[0109]
此外,在如此无法确定初始位置的情况下,球弹道确定部78也可从瞄球时的帧(例如,第5帧)的帧图像中检测杆身。然后,球弹道确定部78可将所检测出的杆身的延伸线、及位于从球手区域96的下边向上移动球手区域96的上下方向的长度的10%的位置,且沿左右方向延伸的线这两条线的交点位置确定为初始位置。
[0110]
在基于比较结果图像确定弹道球位置的情况下,静置不动的球的位置即初始位置不会成为变化像素,因此无法检测出来。另外,在击打前,球极有可能被杆头遮掩。即便在这种状况下,本实施方式中,按照以上方式操作,也能确定初始位置。
[0111]
本实施方式中,飞行距离计算部80例如算出球手40所进行的击打的杆头速度、球速、飞行距离。
[0112]
飞行距离计算部80例如首先从摄影动态图像中包含的帧图像内,抽出杆头显映于最左边的顶点位置帧图像、及杆头显映于最右边的击球瞬间帧图像。图13是表示顶点位置帧图像的一例的图。图14是表示击球瞬间帧图像的一例的图。
[0113]
然后,飞行距离计算部80确定帧图像的二维图像坐标系中呈现的顶点位置帧图像中杆头的坐标值(x,y)、及击球瞬间帧图像中杆头的坐标值(x',y')。然后,飞行距离计算部80基于坐标值(x,y)与坐标值(x',y'),算出图像内杆头移动距离d1。这里,d1例如为(x'-x)的幂与(y'-y)的幂的和的平方根。此外,在帧图像中,右方向是x轴正方向,下方向是y轴正方向。
[0114]
然后,飞行距离计算部80算出所述击球瞬间帧的帧编号与顶点位置帧图像的帧编号的差乘以摄影时间间隔(例如,1/60秒)所得的值,将其作为杆头移动时间t1(秒)。
[0115]
然后,飞行距离计算部80算出值d1除以值t1所得的值,将其作为杆头速度s(米/秒)。
[0116]
然后,飞行距离计算部80算出杆头速度s乘以指定的预计精准率(meting rate)1.25所得的值,将其作为预计球初速度v(米/秒)。
[0117]
然后,飞行距离计算部80算出预计球初速度v乘以指定系数4
×
0.8
×
1.0936所得的值,将其作为预计总飞行距离d2(码,yard)。
[0118]
然后,飞行距离计算部80针对各帧图像,基于帧图像的二维图像坐标系中呈现的该帧图像内弹道球位置的坐标值,确定该帧的相机坐标系中的上下角度及左右角度。这里,将帧图像(n)的弹道球位置的坐标值记载为(x1(n),y1(n)),将与帧图像(n)对应的帧的相机坐标系中的上下角度记载为a1(n),将左右角度记载为a2(n)。这里所说的相机坐标系中的上下角度是指,以指定方向为基准,从相机部28观察球时上下方向的角度,左右角度是指,以指定方向为基准,从相机部28观察球时左右方向的角度。
[0119]
本实施方式中,如上所述,会进行用户终端10的位置及倾斜的调整,因此球位置的二维坐标值与上下角度及左右角度可一一对应。因此,本实施方式中,例如,飞行距离计算部80通过参照预先保存的表示转换式或转换表的数据,能基于球位置的二维坐标值,唯一确定上下角度及左右角度。
[0120]
另外,飞行距离计算部80同样地操作,而基于球的初始位置的坐标值(x0,y0),确定从相机部28观察位于初始位置的球时的上下角度a1'及左右角度a2'。
[0121]
然后,飞行距离计算部80基于所算出的预计总飞行距离d2,确定与该预计总飞行距离d2相对应、表示三维空间内球的弹道的轨迹的抛物线。此外,本实施方式中,预计总飞行距离d2与抛物线的形状已预先建立对应关系。然后,飞行距离计算部80算出与上下角度及左右角度对应、沿着该抛物线的三维空间内球的位置的三维坐标值。这里,例如,针对与帧图像(n)对应的帧,基于所述抛物线、上下角度a1(n)、左右角度a2(n),算出三维坐标值(x2(n),y2(n),z2(n))。
[0122]
本实施方式中,例如,针对各帧,以与球的初始位置的上下角度a1'、左右角度a2'对应的三维坐标值为原点,算出球的位置的三维坐标值。
[0123]
这里,同样因为会进行用户终端10的位置及倾斜的调整,所以抛物线、上下角度、左右角度三者的组合与球的位置的三维坐标值可一一对应。因此,本实施方式中,例如,飞行距离计算部80通过参照预先保存的表示转换式或转换表的数据,能基于抛物线、上下角度及左右角度,唯一确定球的位置的三维坐标值。
[0124]
然后,飞行距离计算部80求解将以所述方式算出的球的位置的三维坐标值中的2个作为输入,将左右角度与仰角作为未知数的二元方程序,由此算出与该输入对应的左右角度与仰角。
[0125]
飞行距离计算部80在各种图案中选择所输入的一对三维坐标值,针对各个图案算出左右角度的值与仰角的值的组合。然后,飞行距离计算部80将针对各种图案而算出的仰角的值的平均值决定为球的飞行轨迹整体的仰角a3。
[0126]
然后,飞行距离计算部80针对各帧,基于球的位置的三维坐标值,算出使所算出的仰角a3为固定值时的左右角度。
[0127]
然后,如图15所示,飞行距离计算部80通过回归分析,算出左右角度的初始值与最终值(球落地时的左右角度)。这里,例如,算出击球瞬间的左右角度作为左右角度的初始值。然后,算出基于所述抛物线而确定出的弹着点的位置处的左右角度作为左右角度的最终值。
[0128]
然后,飞行距离计算部80通过数式1.33.
×
(1-0.01
×
仰角偏差)
×
cos(左右角度
绝对值 弯曲角度绝对值),算出精准率。
[0129]
这里,所谓仰角偏差是指,所算出的仰角a3与值14的差的绝对值。另外,所谓左右角度绝对值是指,作为左右角度的初始值而算出的值的绝对值。另外,所谓弯曲角度绝对值是指,作为左右角度的最终值而算出的值减去作为左右角度的初始值而算出的值所获得的值的绝对值。
[0130]
然后,飞行距离计算部80使如此算出的精准率乘以所算出的杆头速度s,由此算出球初速度。
[0131]
然后,使所算出的球初速度乘以4
×
0.8
×
1.0936,由此算出飞行距离(码)。
[0132]
此外,飞行距离等的计算方法并不限定于所述方法。
[0133]
本实施方式中,杆头轨道确定部82例如基于摄影动态图像,确定该摄影动态图像上显映的杆头的轨道。
[0134]
杆头轨道确定部82例如首先确定图16所示的杆头检测区域102。这里,杆头检测区域102的位置、形状、大小例如按照预先制定的规则,基于球手区域96的位置、形状、大小而唯一确定。在图16的例子中,示出了中心位置与球手区域96相同、左右方向的长度为球手区域96的3倍、上下方向的长度为球手区域96的2倍的区域作为杆头检测区域102。
[0135]
然后,杆头轨道确定部82针对摄影动态图像中包含的多个帧图像,确定该帧图像的杆头检测区域102内显映杆头的位置。这里,例如,也可针对截至击球瞬间帧为止的帧图像,确定帧图像内显映杆头的区域。这里,确定显映杆头的区域时,也可使用所述比较结果图像。例如,可将杆头检测区域102内与变化像素的像素集即指定个像素的范围对应的区域确定为显映杆头的区域。而且,杆头轨道确定部82可针对所确定出的各区域,将该区域内的代表点(例如中心)的位置确定为显映杆头的位置(以下,称为杆头位置)。
[0136]
而且,杆头轨道确定部82可基于所确定出的多个杆头位置,确定杆头轨道。例如,杆头轨道确定部82可利用三次贝塞尔曲线计算,针对各帧插补所确定出的杆头位置,由此将图17中所例示的经过帧间插补所得的平滑线状的杆头的移动轨迹l1确定为杆头轨道。
[0137]
另外,杆头轨道确定部82可基于摄影动态图像,确定击球瞬间杆头的移动方向。例如,杆头轨道确定部82可在以所述方式确定出的杆头的移动轨迹l1上,确定击球瞬间帧的前一帧中的杆头位置。另外,杆头轨道确定部82也可在以所述方式确定出的杆头的移动轨迹l1上,确定击球瞬间帧的后一帧中的杆头位置。
[0138]
而且,杆头轨道确定部82可确定图17中所例示的将击球瞬间帧的前一帧中的杆头位置与击球瞬间帧的后一帧中的杆头位置连结的线l2。
[0139]
而且,杆头轨道确定部82可确定摄影动态图像的二维图像坐标系中呈现的击球瞬间杆头的移动方向与指定的基准方向所成的角度。杆头轨道确定部82例如可如图17所示,将帧图像中沿上下方向延伸的线l3与沿着杆头的移动方向的所述线l2所成的角度确定为击球瞬间杆头的移动方向的角度a4。以下,将如此确定出的击球瞬间杆头的移动方向的角度称为挥杆路径角度。此外,本实施方式中,挥杆路径角度以逆时针方向为正方向。也就是说,图17所示的挥杆路径角度a4的值为负。
[0140]
本实施方式中,击出方向确定部84例如基于摄影动态图像,确定该摄影动态图像上显映的球的击出方向。
[0141]
击出方向确定部84例如针对摄影动态图像中包含的多个帧图像,基于该帧图像内
显映球的位置,确定击出方向。这里,例如,击出方向确定部84也可基于由球弹道确定部78确定出的球的弹道,确定击出方向。例如,可基于由球弹道确定部78确定出的击球瞬间帧之后的指定个帧(例如5帧)中帧图像内的弹道球位置,确定击出方向。例如,可将图18中所例示的沿着击球瞬间帧之后的指定个帧中帧图像内的弹道球位置的近似直线l4的方向确定为击出方向。
[0142]
另外,击出方向确定部84也可确定摄影动态图像的二维图像坐标系中呈现的击出方向与指定的基准方向所成的角度。例如,可如图18所示,将帧图像中沿上下方向延伸的线l3与沿着击出方向的线l4所成的角度确定为击出角度a5。此外,本实施方式中,击出角度以逆时针方向为正方向。也就是说,图18所示的击出角度a5的值为正。
[0143]
然后,击出方向确定部84基于所确定出的击出方向,确定击球瞬间杆面的方向。
[0144]
例如,在击出角度a5的绝对值小于指定值的情况下,可将杆面方向确定为方正(square)。另外,在击出角度a5的绝对值为指定值以上,且击出角度a5的值为正的情况下,可将杆面方向确定为关闭(closed)。另外,在击出角度a5的绝对值为指定值以上,且击出角度a5的值为负的情况下,可将杆面方向确定为打开(open)。
[0145]
本实施方式中,挥杆轨道种类确定部86例如确定球手40所实施的挥杆轨道的种类。这里,例如,挥杆轨道种类确定部86确定球手40所进行的挥杆中挥杆轨道是inside-out、inside-in或outside-in中的哪一种。
[0146]
挥杆轨道种类确定部86例如可基于所述挥杆路径角度a4,确定挥杆轨道的种类。
[0147]
例如,在挥杆路径角度a4的绝对值小于指定值的情况下,可将挥杆轨道的种类确定为inside-in。另外,在挥杆路径角度a4的绝对值为指定值以上,且挥杆路径角度a4的值为正的情况下,可将挥杆轨道的种类确定为outside-in。另外,在挥杆路径角度a4的绝对值为指定值以上,且挥杆路径角度a4的值为负的情况下,可将挥杆轨道的种类确定为inside-out。
[0148]
利用挥杆轨道种类确定部86确定挥杆轨道的种类的方法并不限定于所述方法。
[0149]
例如,挥杆轨道种类确定部86也可基于摄影动态图像,确定瞄球时的帧图像上显映的球手40的指定的身体部位的位置。这里,例如,挥杆轨道种类确定部86可确定指定的帧编号的帧图像(例如,帧图像(5))上显映的球手40的指定的身体部位的位置。这里,例如,可确定由球手区域确定部72确定出的骨架模型98中所示的球手40的肩部位置。
[0150]
而且,挥杆轨道种类确定部86可如图19所示,确定将所确定出的肩部位置q1与由球弹道确定部78确定出的初始位置q2连结的线l5。
[0151]
另外,挥杆轨道种类确定部86也可如图19所示,确定沿着帧图像上显映的杆身的线l6。
[0152]
这里,挥杆轨道种类确定部86可确定图19所示的瞄球时杆身检测区域104、及上挥杆时杆身检测区域106。这里,例如,瞄球时杆身检测区域104例如可为位置及大小基于球手区域96而唯一确定、位于球手区域96的右下方的区域。另外,上挥杆时杆身检测区域106例如可为位置及大小基于球手区域96而唯一确定、位于球手区域96的左上方的区域。
[0153]
而且,挥杆轨道种类确定部86可将在上挥杆时杆身检测区域106内检测出杆身的帧图像确定为上挥杆时的帧图像。而且,挥杆轨道种类确定部86也可针对瞄球时杆身检测区域104内的彼此相对应的各像素,生成表示瞄球时的帧图像中的像素值与上挥杆时的帧
图像中的像素值的差的杆身检测图像。此外,这里,也可使用所述顶点位置帧图像来取代以所述方式确定出的上挥杆时的帧图像。
[0154]
而且,挥杆轨道种类确定部86可对所生成的杆身检测图像应用霍夫转换等直线检测方法,由此确定沿着杆身的线l6。
[0155]
而且,挥杆轨道种类确定部86可基于依据摄影动态图像而确定出的瞄球时球手40的指定的身体部位的位置、或瞄球时杆身的位置中的至少一者,确定至少1个基准角度。
[0156]
这里,挥杆轨道种类确定部86例如可基于指定的身体部位的位置,确定第1基准角度。另外,挥杆轨道种类确定部86也可基于指定的身体部位的位置、及挥杆前球的位置,确定第1基准角度。
[0157]
例如,挥杆轨道种类确定部86可如图19所示,将帧图像中沿左右方向延伸的线l7与把肩部位置q1及初始位置q2连结的线l5所成的角度确定为第1基准角度a6。
[0158]
另外,挥杆轨道种类确定部86例如也可基于瞄球时杆身的位置,确定第2基准角度。
[0159]
例如,挥杆轨道种类确定部86可如图19所示,将帧图像中沿左右方向延伸的线l7与沿着杆身的线l6所成的角度确定为第2基准角度a7。
[0160]
也可如此确定摄影动态图像的二维图像坐标系中呈现的基准角度。
[0161]
另外,挥杆轨道种类确定部86还可基于摄影动态图像,确定摄影动态图像上显映的杆头的下挥杆角度。例如,挥杆轨道种类确定部86例如可基于击球瞬间前的指定个帧的帧图像,确定下挥杆角度。
[0162]
这里,例如,将击球瞬间帧的后一帧的帧编号设为m。这里,可针对第(m-5)帧至第(m-2)帧这4个帧,在以所述方式确定出的杆头的移动轨迹l1上,确定杆头位置。而且,可将表示第(m-5)帧至第(m-4)帧中杆头的移动方向、第(m-4)帧至第(m-3)帧中杆头的移动方向、及第(m-3)帧至第(m-2)帧中杆头的移动方向平均化所得的移动方向的线确定为图20中所例示的沿着下挥杆方向的线l8。
[0163]
或者,也可将沿着第(m-5)帧至第(m-2)帧这4个帧中的杆头位置的近似直线确定为图20中所例示的沿着下挥杆方向的线l8。此外,用于确定线l8的帧并不限定于第(m-5)帧至第(m-2)帧这4个帧。
[0164]
而且,挥杆轨道种类确定部86可如图20所示,将帧图像中沿左右方向延伸的线l7与沿着所述下挥杆方向的线l8所成的角度确定为下挥杆角度a8。
[0165]
也可如此确定摄影动态图像的二维图像坐标系中呈现的下挥杆角度。
[0166]
而且,挥杆轨道种类确定部86可将所述基准角度与所述下挥杆角度加以比较。而且,挥杆轨道种类确定部86可基于所述基准角度与所述下挥杆角度的比较结果,确定挥杆中挥杆轨道的种类。例如,挥杆轨道种类确定部86可基于第1基准角度、第2基准角度及下挥杆角度,确定挥杆中挥杆轨道是inside-out、inside-in或outside-in中的哪一种。
[0167]
例如,在下挥杆角度a8的值大于第1基准角度a6的值的情况下,可将挥杆轨道的种类确定为outside-in。该情况相当于从所谓v字区的外侧(上侧)使球杆向下挥动的状况。
[0168]
另外,在下挥杆角度a8的值为第2基准角度a7的值以上且第1基准角度a6的值以下的情况下,可将挥杆轨道的种类确定为inside-in。该情况相当于所谓挥杆轨道收缩于v字区范围内的状况。
[0169]
另外,在下挥杆角度a8的值小于第2基准角度a7的值的情况下,可将挥杆轨道的种类确定为inside-out。该情况相当于从所谓v字区的内侧(下侧)使球杆向下挥动的状况。
[0170]
本实施方式中,弯曲方向判定部88例如基于以所述方式确定出的杆头轨道、及以所述方式确定出的击出方向,判定被击出的球的弯曲方向。弯曲方向判定部88也可基于杆头的移动方向及击出方向,判定弯曲方向。
[0171]
弯曲方向判定部88例如基于带有符号的挥杆路径角度a4与带有符号的击出角度a5的差,判定球的弯曲方向。例如,在带有符号的挥杆路径角度a4的值与带有符号的击出角度a5的值的差小于指定值的情况下,判定为球未弯曲(笔直地飞行)。另外,例如,在带有符号的挥杆路径角度a4的值与带有符号的击出角度a5的值的差为指定值以上,且带有符号的击出角度a5的值大于带有符号的挥杆路径角度a4的值的情况下,判定为球向左弯曲。另外,在带有符号的挥杆路径角度a4的值与带有符号的击出角度a5的值的差为指定值以上,且带有符号的击出角度a5的值小于带有符号的挥杆路径角度a4的值的情况下,判定为球向右弯曲。
[0172]
另外,弯曲方向判定部88也可基于杆头轨道及击出方向,判定被击出的球的弯曲方向及弯曲大小。例如,可将带有符号的挥杆路径角度a4的值与带有符号的击出角度a5的值的差的绝对值确定为表示弯曲大小的弯曲值。另外,例如,也可基于带有符号的挥杆路径角度a4的值与带有符号的击出角度a5的值的差的绝对值的大小,来决定例如“大”“中”“小”等以数个级别(例如,3个级别)评价弯曲大小的弯曲评价值。
[0173]
本实施方式中,解析动态图像生成部90例如生成由表示挥杆解析处理结果的图像重叠于摄影动态图像所形成的解析动态图像。
[0174]
解析动态图像生成部90也可生成由呈现出杆头轨道、基于击出方向而确定出的击球瞬间杆面的方向、及球的弯曲方向的图像重叠于摄影动态图像所形成的解析动态图像。例如,可生成由图2所示的击球瞬间图像48重叠于摄影动态图像中包含的帧图像所形成的解析动态图像。这里,可将由挥杆轨道种类确定部86确定出的挥杆轨道的种类以杆头轨道的形式呈现于击球瞬间图像48中。
[0175]
图21是表示击球瞬间图像48的变化的一例的图。图21中示出了对应于挥杆轨道的种类与杆面方向的种类的组合而出现的9种击球瞬间图像48。
[0176]
此外,图21所示的击球瞬间图像48中反映出了挥杆轨道、杆面方向、球的弯曲方向的种类。此外,击球瞬间图像48中也可不仅反映出挥杆轨道、杆面方向、球的弯曲方向的种类,还反映出弯曲大小。
[0177]
例如,杆头移动方向图像50所示的杆头的移动方向(箭头排列的方向)与上下方向所成的角度的大小可为根据所述挥杆路径角度a4的大小而决定的大小。这里,杆头移动方向图像50所示的杆头的移动方向与上下方向所成的角度的大小无需与所述挥杆路径角度a4的大小相同。例如,杆头移动方向图像50所示的杆头的移动方向与上下方向所成的角度可为按照预先制定的转换规则,基于挥杆路径角度a4而决定的角度。
[0178]
另外,例如,杆头移动方向图像50所示的杆头的移动方向与上下方向所成的角度也可为基于所述挥杆路径角度a4的大小,从数个等级的角度大小中决定出的大小。
[0179]
另外,例如,图2所示的线状的杆面方向图像52的延伸方向与左右方向所成的角度的大小可为根据所述击出角度a5而决定的大小。这里,杆面方向图像52的延伸方向与左右
方向所成的角度无需与所述击出角度a5的大小相同。例如,杆面方向图像52的延伸方向与左右方向所成的角度可为按照预先制定的转换规则,基于击出角度a5而决定的角度。
[0180]
另外,例如,线状的杆面方向图像52的延伸方向与左右方向所成的角度也可为基于所述击出角度a5的大小,从数个等级的角度大小中决定出的大小。
[0181]
另外,球方向图像54的弯曲大小可为根据挥杆路径角度a4的值与击出角度a5的值的差的绝对值的大小而决定的大小。例如,可为挥杆路径角度a4的值与击出角度a5的值的差的绝对值越大,球方向图像54的弯曲呈现得越大。另外,例如,球方向图像54的弯曲大小也可为根据所述弯曲评价值而决定的大小。
[0182]
另外,解析动态图像生成部90也可生成由表示所述基准角度的线重叠于摄影动态图像所形成的解析动态图像。例如,解析动态图像生成部90可生成由表示所述第1基准角度的线与表示所述第2基准角度的线重叠于摄影动态图像所形成的解析动态图像。例如,也可生成由图2所示的v字区图像56重叠于摄影动态图像中包含的帧图像所形成的解析动态图像。如图2所示,v字区图像56为三角形的图像,上边相当于图19所示的线l5,下边相当于图19所示的线l6。这里,例如,也能以v字区图像56的上边及下边通过所述初始位置的方式,将v字区图像56配置于帧图像内。
[0183]
另外,如图2所示,解析动态图像中可重叠有与以所述方式确定出的杆头的轨道相应的带状的杆头轨道效果图像42。另外,解析动态图像中也可重叠有与以所述方式确定出的球的轨道相应的带状的球轨道效果图像44。
[0184]
另外,如图2所示,解析动态图像中可配置有表示所述挥杆解析处理的解析结果的解析结果信息46。例如,解析结果信息46中可包含表示由飞行距离计算部80算出的值(球初速度、飞行距离等)的信息、及表示由挥杆轨道种类确定部86确定出的挥杆轨道的种类的信息。
[0185]
然后,本实施方式中,解析动态图像生成部90例如使所生成的解析动态图像存储于解析动态图像存储部92中。
[0186]
本实施方式中,解析动态图像存储部92例如存储解析动态图像生成部90所生成的解析动态图像。
[0187]
本实施方式中,显示控制部94例如根据来自用户终端10的用户的要求,使解析动态图像存储部92中存储的解析动态图像显示于触控面板26。如此,显示控制部94可将所述基准角度与所述下挥杆角度的比较结果通知用户。例如,显示控制部94也可将基于所述基准角度与所述下挥杆角度的比较结果而确定出的挥杆轨道的种类通知用户。
[0188]
这里,参照图22中所例示的流程图,对在本实施方式的用户终端10上进行的处理流程的一例进行说明。
[0189]
首先,摄影动态图像获取部70获取摄影动态图像(s101)。
[0190]
然后,球手区域确定部72确定球手区域96(s102)。
[0191]
然后,比较结果图像生成部74基于通过s101所示的处理而获取到的摄影动态图像,生成多个比较结果图像(s103)。
[0192]
然后,起点区域确定部76基于通过s102所示的处理而确定出的球手区域96,确定起点区域100(s104)。
[0193]
然后,球弹道确定部78基于通过s103所示的处理而生成的比较结果图像,确定球
的弹道(s105)。
[0194]
然后,飞行距离计算部80算出通过s101所示的处理而获取到的摄影动态图像上显映的挥杆击打的飞行距离等(s106)。
[0195]
然后,杆头轨道确定部82基于通过s101所示的处理而获取到的摄影动态图像,确定杆头轨道(s107)。
[0196]
然后,击出方向确定部84基于通过s105所示的处理而确定出的球的弹道,确定球的击出方向(s108)。
[0197]
然后,挥杆轨道种类确定部86基于通过s107所示的处理而确定出的杆头轨道、及通过s108所示的处理而确定出的球的击出方向,确定通过s101所示的处理而获取到的摄影动态图像上显映的挥杆中挥杆轨道的种类(s109)。
[0198]
然后,弯曲方向判定部88基于通过s107所示的处理而确定出的杆头轨道、及通过s108所示的处理而确定出的球的击出方向,判定该击打下球的弯曲方向(s110)。
[0199]
然后,解析动态图像生成部90基于通过s101所示的处理而获取到的摄影动态图像、及s105~s110所示的处理的结果,生成解析动态图像(s111)。
[0200]
然后,解析动态图像生成部90使通过s111所示的处理而生成的解析动态图像存储于解析动态图像存储部92中(s112),至此本处理例所示的处理结束。
[0201]
此外,如上所述,在s109所示的处理中,挥杆轨道种类确定部86也可确定下挥杆角度及基准角度。然后,挥杆轨道种类确定部86可基于所确定出的下挥杆角度及基准角度,确定通过s101所示的处理而获取到的摄影动态图像上显映的挥杆中挥杆轨道的种类。
[0202]
本实施方式中,仅需拍摄正在挥动高尔夫球杆的球手,无需直接计测杆面方向,即可精准判定球的弯曲方向。如此,根据本实施方式,普通球手能在高尔夫球场或高尔夫训练场等处使用智能手机等轻松进行高尔夫挥杆的解析。
[0203]
另外,本实施方式中,仅需拍摄正在挥动高尔夫球杆的球手,即可进行所述基准角度与所述下挥杆角度的比较。因此,根据本实施方式,即便是不具备高尔夫相关知识,比如合适的挥杆平面角度的范围等的普通球手,也能通过获知基准角度与下挥杆角度的比较结果,而容易地了解到挥杆是否正确。
[0204]
另外,本实施方式中,如上所述,基于所述基准角度及所述下挥杆角度,能精准确定该挥杆中挥杆轨道的种类。因此,根据本实施方式,即便是普通球手,也能通过获知自己的挥杆轨道的种类,而容易地了解到是否按正确的挥杆轨道挥杆了。
[0205]
此外,本发明并不限定于所述实施方式。
[0206]
例如,所述第1基准角度无需基于肩部位置来确定,例如也可基于球手40的颈部位置来确定。
[0207]
另外,例如,所述第1基准角度无需基于球的初始位置来确定,例如也可基于用户所指定的位置或瞄球时杆头的位置来确定。
[0208]
另外,例如,所述第2基准角度无需基于杆身位置来确定,例如也可基于球手40的腰部位置来确定。例如,所述第2基准角度可基于将球手40的腰部位置与球的初始位置连结的线、或将球手40的腰部位置与瞄球时杆头的位置连结的线来确定。
[0209]
另外,无需确定2个基准角度,也可基于1个基准角度,确定挥杆轨道的种类。例如,可基于1个基准角度,确定是否为outside-in。另外,例如,也可基于1个基准角度,确定是否
为inside-out。
[0210]
另外,图3所示的处理的全部或一部分也可由能与用户终端10通信的服务器来实现。
[0211]
另外,所述具体字符串及数值、以及附图中的具体字符串及数值仅为例示,并不限定于这些字符串及数值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。