1.本发明涉及放射性材料制备技术领域,具体为放射性籽源自动组装设备及使用方法。
背景技术:
2.治疗用放射性密封籽源是将放射性核素密封在金属或符合材料中,作为放射源植入人体内。国际上大量的临床试验表明,治疗用放射性密封籽源植入体内后,近距照射某些肿瘤,是一种损伤较少、疗效较好的治疗方法。
3.现有技术中,籽源的组装大多为人工操作,需要操作工将放射性核素放入到源壳中,并放入到焊接设备上进行密封焊接,人员会受到长期辐射,造成辐射伤害,还存在品质不稳定且生产效率低等问题。
4.基于上述问题,公告号为cn102436860b的中国专利公开医用放射性籽源自动生产设备,该设备包括机身、t向直线运动模组、z向气动夹紧单元、源壳容器、定位模块、间歇式源壳顶出机构、对心式源壳夹头机构、z向气动机构、离心导向机构、源芯顶送机构、激光焊机可调光纤耦合镜固定安装模块、x向直线运动模组、气动式源壳卸料收集机构、集成控制系统;上述部分组成了源壳自动下料装夹工位、源芯自动装入源壳工位、激光自动焊接工位和自动卸料工位;机身分上下两层,上层安装y向直线运动模组、z向气动夹紧单元、源壳容器、定位模块间歇式源壳顶出机构、离心导向机构、源芯顶送机构、激光焊机可调光纤耦合镜固定安装模块、气动式源壳卸料收集机构,下层安装x向直线运动模组;在x向直线运动模组上安装z向气动机构;在z向气动机构上安装对心式源壳夹头机构;源壳自动下料装夹工位中的源壳容器通过定位模块与z向气动夹紧单元自动定位并锁紧;计算机发出信号,y向直线运动模组拖动源壳容器芯体移动,z向气动机构带动对心式源壳夹头机构上升,间歇式源壳顶出机构顶出源壳容器芯体内一端焊好的源壳到对心式源壳夹头机构中,完成源壳的自动装夹;z向气动机构带动对心式源壳夹头机构下降,x向直线运动模组带动对心式源壳夹头机构运动到源芯自动装入源壳工位,z向气动机构带动对心式源壳夹头机构上升,离心导向机构启动,源芯沿下料轨道单根进入旋转取料盘,旋转取料盘在水平方向旋转180
°
,源芯顶送机构将源芯自动顶入到源壳内,完成源芯的自动装入源壳内;z向气动机构带动对心式源壳夹头机构下降,x向直线运动模组带动对心式源壳夹头机构运动到自动焊接工位,z向气动机构带动对心式源壳夹头机构上升,激光焊机启动,z向可调光纤耦合镜出光,完成自动焊接;z向气动机构带动对心式源壳夹头机构下降,x向直线运动模组带动对心式源壳夹头机构运动到自动卸料和收集工位,气动式源壳卸料收集机构启动,取下对心式源壳夹头机构中焊好的源壳(即籽源)放入收集容器中,完成整个过程的自动化生产。
5.源壳大多为钛管,在生产时,需要先焊接住源壳的一端,然后将放射性核素放入一端焊死的钛管内,最后将另一端焊死,从而形成一个密封籽源,上述设备在组装前,其源壳的一端均已经预先焊死,上述的整个步骤就是实现将放射性核素放入一端焊死的源壳内然后实现另一端焊死的步骤,故,无法利用上述设备直接实现源壳一端密封—放射性核素置
入—源壳另一端密封的操作步骤,故,生产效率仍有待提高。
技术实现要素:
6.针对现有的放射性籽源生产设备需要两个流水线工序才能实现籽源的组装,存在生产效率较低的问题,本发明的第一目的在于提供一种独立实现籽源组装的放射性籽源自动组装设备。
7.为了解决上述技术问题,本发明提供如下技术方案:放射性籽源自动组装设备,包括机台,所述籽源包括源壳和内部的放射性核素,其特征在于:所述机台包括:
8.震动上料盘,用于将源壳或放射性核素运送至出料口部位;
9.第一转运机构,包括机械臂和吸附机构,所述吸附机构用于吸取或释放源壳和放射性核素,所述机械臂运载所述吸附机构用于将处于出料口部位的源壳或放射性核素转运至第二转运机构处;
10.第二转运机构,包括夹持机构和驱使夹持机构往复运动的线性驱动机构,所述夹持机构用于夹持所述源壳或者夹着源壳接收所述放射性核素,且所述夹持机构可进行翻转作业;
11.焊接机构,包括激光焊接枪,当线性驱动机构驱使夹持机构夹着源壳运送至激光焊接枪的焊接位后,激光焊接枪对源壳的端部进行封口焊接;
12.充气机构,包括充气管以及与充气管连接的惰性气源,在源壳装载放射性核素且移动至焊接位时,充气管向源壳开口处喷射惰性气体;
13.收料机构,包括收料筒,当线性驱动机构驱使夹持机构运送至收料筒上方时,释放籽源进入收料筒。
14.根据上述方案,两个独立的震动上料盘通过震动依次将源壳和放射性核素运送至出料口部位,机械臂转动至震动上料盘处利用吸附机构先后将源壳和放射性核素吸附,机械臂转动至夹持机构处,机械臂先释放源壳,夹持机构吸附源壳并在线性驱动机构驱动下移动至焊接位,激光焊接枪发射激光对源壳一端进行焊接,接着夹持机构翻转180度并在线性驱动机构驱动下移动至初始位置,机械臂释放核素进入源壳内,夹持机构在线性驱动机构驱动下再次移动至焊接位,充气管向源壳开口处喷射惰性气体,激光焊接枪对源壳端部进行焊接完成组装,夹持机构移动至收料机构处,释放源壳进入收料筒内,夹持机构移动至初始位置,完成一个籽源的组装,该组装过程相较于对比文件记载的现有技术,将源壳预先端部焊接的过程融合在整个组装过程中,化两个工序为一个工序,同时省略了工件转运过程,只需一台设备就能快速实现整个籽源的组装,组装过程精炼快捷,显著提高了籽源的组装效率,整个过程完全自动化,提高了操作的安全性。
15.进一步的,吸附机构包括安装块以及固定在安装块上的两吸料管,两吸料管分别连接有两个独立的气泵,安装块固定于一旋转机构的转动部件上,所述旋转机构通过第一升降部件可沿机械臂竖直升降运动。
16.根据上述方案,两个独立的吸料管各单独连接一个气泵,可实现源壳和放射性核素的独立吸附或释放,灵活性高,旋转机构通过第一升降部可实现吸附机构的转动和升降,结合机械臂后,吸附机构能够实现x轴—y轴—z轴的灵活移动,显著提高了吸附的精度。
17.进一步的,旋转机构为旋转气缸或电机,安装块固定于旋转气缸或电机的转轴上。
18.根据上述方案,旋转气缸或电机均能够实现其上转轴的转动,以实现安装块上的吸料管的转动。
19.进一步的,所述夹持机构配合有一支撑调节机构,支撑调节机构可支撑源壳并调节夹持机构夹持的高度。
20.根据上述方案,支撑调节机构可以增加夹持机构的夹持精度,夹持机构可根据需求设置夹持深度。
21.进一步的,支撑调节机构包括配合块,竖直弹性伸缩于配合块上的支撑柱,在配合块和支撑柱之间设置有可驱使支撑柱局部伸出配合块上端的弹性件,在吸附机构上设有用于下压源壳的压块。
22.根据上述方案,吸料管释放源壳后,支撑柱和松开的夹持机构之间存在供源壳进入的空间,支撑柱能够避免源壳掉落,源壳立在支撑柱上后,压块下压控制源壳的高度,夹持机构夹紧源壳,这样就实现了源壳夹持高度的精确控制。
23.进一步的,在机台上设置有避免在夹持机构移动时支撑柱与源壳发生摩擦的让位机构,让位机构包括设置于机台上的第二升降部件,配合块受第二升降部件驱动进行升降。
24.根据上述方案,压块下压后,支撑柱处于压缩状态,支撑柱与源壳底部之间存在挤压力,第二升降部下降,驱使配合块下降,驱使支撑柱复位直至与源壳之间间隙配合,此时,夹持机构移动,源壳与支撑柱之间不存在摩擦力,以避免源壳受到磨损。
25.进一步的,线性驱动机构包括一无杆气缸或丝杆滑台直线模组,夹持机构为一回转夹紧气缸,该回转夹紧气缸固定在无杆气缸的滑块或丝杆滑台直线模组的滑台上。
26.根据上述方案,无杆气缸或丝杠滑台直线模组均具备滑台,且可控制滑台的精确移动,将夹持机构固定在滑台上,就能实现夹持机构的精确移动。
27.进一步的,收料机构配合有一可检测籽源是否合格的检测机构,检测机构包括用于给籽源拍照的第二摄像机,收料筒包括合格料筒和废料筒,当籽源为合格品时,线性驱动机构驱使夹持机构运送籽源至合格料筒上方,并释放籽源进入合格料筒内;当籽源为不合格品时,线性驱动机构驱使夹持机构运送籽源至废料筒上方,并释放籽源进入废料筒内。
28.根据上述方案,设置检测机构后,籽源生产后自动检测是否合格,且自动分装合格品和废品,不仅提高了生产效率,还可省略后续的人工检验,进一步降低操作人员受到辐射的概率,提高操作的安全性。
29.进一步的,所述收料机构配合有吹扫机构,吹扫机构包括于合格料筒和废料筒正上方设置的可感应工件是否穿过其的感应器以及位于感应器正上方的吹气管,吹气管与气源连接,当感应器未检测到籽源经过时,吹气管向下吹气直至感应器感应到被卡的籽源经过其为止。
30.根据上述方案,吹扫机构的设置能够避免籽源在收料时发生卡死现象,提高流水线作业的流畅性。
31.本发明的第二目的是提供放射性籽源自动组装设备的使用方法,包括以下步骤:
32.a、吸料:机械臂转动至震动上料盘的出料口部位,吸附机构的两吸料管分别吸附源壳和放射性核素;
33.b、第一次转运:机械臂带着吸附机构转动至对准夹持机构处,吸附机构释放源壳,夹持机构夹住源壳;
34.c、第一次焊接:线性驱动机构驱使夹持机构移动至焊接工位,激光焊接枪发射激光对源壳端部进行焊接;
35.d、第二次转运:夹持机构夹持源壳并翻转180
°
,线性驱动机构驱使夹持机构移动至初始位置,机械臂转动至吸附机构对准夹持机构,吸附机构释放放射性核素,放射性核素进入源壳内;
36.e、第二次焊接:夹持机构夹持内置放射性核素的源壳移动至焊接位,充气机构向源壳开口喷射惰性气体,激光焊接枪发射激光对源壳端部进行焊接;
37.f、籽源收集:线性驱动机构驱使夹持机构移动至收料筒,夹持机构松开,籽源落入收料筒内;
38.g、复位;
39.h、重复上述步骤a至g。
40.与现有技术相比,本发明所达到的有益效果是:
41.1、整台设备只需两个独立的震动上料盘通过震动依次将源壳和放射性核素运送至出料口部位,机械臂转动至震动上料盘处利用吸附机构先后将源壳和放射性核素吸附,机械臂转动至夹持机构处,机械臂先释放源壳,夹持机构吸附源壳并在线性驱动机构驱动下移动至焊接位,激光焊接枪发射激光对源壳一端进行焊接,接着夹持机构翻转180度并在线性驱动机构驱动下移动至初始位置,机械臂释放核素进入源壳内,夹持机构在线性驱动机构驱动下再次移动至焊接位,充气管向源壳开口处喷射惰性气体,激光焊接枪对源壳端部进行焊接完成组装,夹持机构移动至收料机构处,释放源壳进入收料筒内,夹持机构移动至初始位置,完成一个籽源的组装,该组装过程相较于对比文件,将源壳预先端部焊接的过程融合在整个组装过程中,化两个工序为一个工序,省略工件转运过程,只需一台设备就能快速实现整个籽源的组装,组装过程精炼快捷,显著提高了籽源的组装效率,整个过程完全自动化,提高了操作的安全性。
42.2、增设支撑调节机构,吸料管释放源壳后,支撑柱和松开的夹持机构之间存在供源壳进入的空间,支撑柱能够避免源壳掉落,源壳立在支撑柱上后,压块下压控制源壳的高度,夹持机构夹紧源壳,这样就实现了源壳夹持高度的精确控制。
43.3、增设检测机构,籽源生产后自动检测是否合格,且自动分装合格品和废品,不仅提高了生产效率,还可省略后续的人工检验,进一步降低操作人员受到辐射的概率,提高操作的安全性。
附图说明
44.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
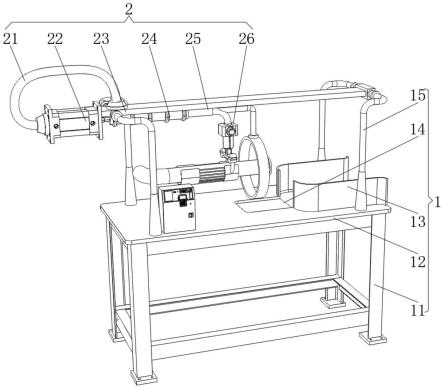
45.图1是本实施例的放射性籽源自动组装设备的轴测图;
46.图2是本实施例的第一转运机构的轴测图;
47.图3是图2的a的放大图;
48.图4是本实施例的第二转运机构的轴测图;
49.图5是图4的b的放大图;
50.图6是本实施例的收料机构和检测机构的轴测图。
51.图中:1、震动上料盘;2、机械臂;3、回转夹紧气缸;4、丝杠滑台直线模组;5、第一摄像机;6、补光灯;7、收料筒;701、合格料筒;702、废料筒;8、第二摄像机;9、激光焊接枪;10、第一气缸;11、电机;12、安装块;13、吸料管;14、压块;15、凹槽;16、限位环;17、第二气缸;18、配合块;19、支撑柱;20、弹簧;21、支架;22、充气管;23、吹气管;14、感应器;25、背光源;26、第三气缸。
具体实施方式
52.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
53.实施例
54.一种放射性籽源自动组装设备,参照图1-图6所示,用于将源壳和放射性核素组装形成籽源,该设备包括机台,机台包括:震动上料盘1、第一转运机构、第二转运机构、焊接机构和收料机构。
55.震动上料盘1,用于将源壳或放射性核素运送至出料口部位,震动上料盘的品牌为。
56.第一转运机构参照图2-图3所示,包括机械臂2和吸附机构,机械臂2的品牌为雅马哈、型号为yk400xe,吸附机构用于吸取或释放源壳和放射性核素,机械臂2运载吸附机构用于将处于出料口部位的源壳或放射性核素转运至第二转运机构处,吸附机构以及其与机械臂2的配合关系如下:吸附机构包括安装块12以及固定在安装块12上的两吸料管13,两吸料管13分别连接有两独立的气泵,安装块12固定于一旋转机构的转动部件上,该旋转机构为旋转气缸或电机11,本实施例采用的为电机11,安装块12垂直固定在电机11轴上,该电机11通过第一升降部件可沿机械臂2竖直升降运动,第一升降部件为第一气缸10,该第一气缸10的缸体内置于机械臂2内,第一气缸10的活塞杆竖直向下设置,电机11的机体固定在第一气缸10的活塞杆下端。
57.第二转运机构参照图4所示,包括夹持机构和驱使夹持机构往复运动的线性驱动机构,夹持机构用于夹持源壳或者夹着源壳接收放射性核素,且夹持机构可进行翻转作业,夹持机构为一回转夹紧气缸3,回转夹紧气缸的品牌为smc,型号为mrhq10d-180s,线性驱动机构包括一无杆气缸或丝杠滑台直线模组4,本实施例采用的为丝杠滑台直线模组4,丝杠滑台直线模组的品牌为qrxq,型号为rxp45,回转夹紧气缸3固定在该模组的滑台上端面。
58.为了增加回转夹紧气缸3的夹持灵活性和夹持精度,参照图5所示,夹持机构配合有一支撑调节机构,支撑调节机构可支撑源壳并调节夹持机构夹持的高度,支撑调节机构包括配合块18,竖直弹性伸缩于配合块18上的支撑柱19,该配合块18的侧壁设置有一凹槽15,凹槽15上端设置有可供支撑柱19插入的插槽,支撑柱19外环壁凸设有一位于凹槽15内的限位环16,在配合块18和支撑柱19之间设置有可驱使支撑柱19局部伸出配合块上端的弹性件,该弹性件为一弹簧20,该弹簧20套设于支撑柱19上且上下端分别与限位环16和凹槽15底部弹性抵接,在吸附机构上设有用于下压源壳的压块14,该压块14优选垂直于吸料管13设置,在机台上设置有避免在夹持机构移动时支撑柱19与源壳发生摩擦的让位机构,让位机构包括设置于机台上的第二升降部件,第二升降部件为第二气缸17,第二气缸17的缸体固定在机台上,第二气缸17的活塞杆竖直向上设置且上端固定上述的配合块18,配合块
18受第二气缸17的驱动进行升降,这样设置的理由为,当吸料管13释放源壳后,支撑柱19和回转夹紧气缸3的夹爪之间存在供源壳进入的空间,支撑柱19能够避免源壳掉落,源壳立在支撑柱19上后,压块14下压控制源壳的高度,回转夹紧气缸3的夹爪夹紧源壳,这样就实现了源壳夹持高度的精确控制,而压块14下压后,支撑柱19处于压缩状态,支撑柱19与源壳底部之间存在挤压力,此时,第二气缸17活塞杆收缩,就能驱使配合块18下降,驱使支撑柱19复位直至与源壳之间间隙配合,此时,回转夹紧气缸3移动,源壳与支撑柱19之间不存在摩擦力,就能避免源壳受到磨损。
59.在回转夹紧气缸3的初始位还设置有用于拍摄回转夹紧气缸3夹持状态的第一摄像机5。
60.焊接机构,参照图1所示,包括激光焊接枪9,当丝杠滑台直线模组4的滑台移动时,可驱使回转夹紧气缸3夹着源壳运送至激光焊接枪9的焊接位后,激光焊接枪9对源壳的端部进行封口焊接;
61.充气机构,参照图1和图6所示,包括充气管22以及与充气管22连接的惰性气源,本实施例中,惰性气体为氮气,充气管22与氮气气源之间连接有可启闭氮气气源的电磁阀,在源壳装载放射性核素且移动至焊接位时,电磁阀切换,充气管22向源壳开口处喷射氮气;
62.收料机构,参照图6所示,包括收料筒7,收料通包括合格料筒701和废料筒702,收料机构配合有一可检测籽源是否合格的检测机构,检测机构包括用于给籽源拍照的第二摄像机8,为了提高拍摄质量,在收料筒7远离第二摄像机8的一侧设置有可升降的背光源25,该背光远的升降受控于第三气缸26,背光源25固定在第三气缸26的活塞杆上端,第二摄像机8还配合有一补光灯6,可根据现场光暗程度进行不光,当籽源为合格品时,丝杠滑台直线模组4驱使回转夹紧气缸3运送籽源至合格料筒701上方时,释放籽源进入合格料筒701;当籽源为不合格品时,丝杠滑台直线模组4驱使回转夹紧气缸3运送籽源自废料筒702上方,并释放籽源进入废料筒702。
63.为了避免籽源在释放时发生卡死,收料机构还配合有吹扫机构,参照图6所示,吹扫机构包括于合格料筒701和废料筒702正上方设置的可感应工件是否穿过其的感应器14以及位于感应器14正上方的吹气管23,吹气管23与气源连接,该气源为空气源,吹气管23与空气源之间设置有可启闭该未检测到籽源经过其时,吹气管23向下吹气直至感应器14感应到被卡的籽源经过其为止,为了便于安装,机台配合有一固定的支架21,上述部件中,支架21通过上下水平设置的两隔板分成三层,最上层固定有充气管22和两根吹气管23,中层固定有两感应器14,下层则放置合格料筒701和废料筒702,在支架21侧壁还设置可供第二摄像机8的摄像头插入的支撑插孔。
64.本设备配备有控制器,控制器为plc,上述的震动上料盘1、电机11、第一气缸10、第二气缸17、第三气缸26、机械臂2、气泵、第一摄像机5、第二摄像机8、背光源25、控制惰性气源的电磁阀、控制空气源的电磁阀、感应器14、回转夹紧气缸3、丝杠滑台直线模组4、激光焊接枪9均与控制器连接,上述震动上料盘1的启闭、机械臂2的启闭和转动、第一气缸10的升降、电机11的启闭、第二气缸17的升降、气泵的启闭、第三气缸26的升降、第一摄像机5的启闭、第二摄像机8的启闭、背光源25的启闭、感应器14、惰性气源的启闭、空气源的启闭、回转夹紧气缸3的回转和松紧、丝杠滑台直线模组4的移动、激光焊接枪9的启闭以及这些部件的运行时机等均由控制器现有的逻辑编程实现。
65.本设备进行籽源组装的步骤如下:
66.a、吸料:机械臂2转动至震动上料盘1的出料口部位,电机11转动驱使两吸料管13处于竖直向下的状态并分别吸附源壳和放射性核素,源壳和放射性核素垂直吸附在两吸料管13端部,电机11再次转动,两吸料管13转动至水平状态;
67.b、第一次转运:首先,机械臂2带着吸料管13转动至对准回转夹紧气缸3,接着,第一气缸10的活塞杆伸出,吸附源壳的吸料管13释放源壳(在源壳释放前,第二气缸17处于伸出状态,待源壳释放时,源壳恰好进入回转夹紧气缸3和支撑柱19之间),进一步,机械臂2移动至错开回转夹紧气缸3,进一步,第一气缸10回缩且电机11转动至压块14处于竖直向下的状态,进一步,机械臂2转动至压块14处于源壳的正上方,第一气缸10再次伸出,压块14下压源壳至指定高度,进一步,回转夹持气杠夹住源壳,进一步,第一气缸10再次回缩且机械臂2移动至错开回转夹紧气缸3,进一步,第二气缸17收缩,支撑柱19离开源壳底部,最后,第一摄像机5对回转夹紧气缸3拍照并将图像发送至控制器,控制器确认其是否夹持住源壳;
68.c、第一次焊接:丝杠滑台直线模组4驱使回转夹紧气缸3移动至焊接工位,激光焊接枪9发射激光对源壳端部进行焊接;
69.d、第二次转运:首先,回转夹紧气缸3夹持源壳并翻转180
°
,接着,丝杠滑台直线模组4驱使夹持机构移动至初始位置,进一步,机械臂2转动至吸有放射性核素的吸料管13对准回转夹紧气缸3,进一步,第二气缸17上升,进一步,机械臂2释放放射性核素进入源壳内,进一步,电机11转动使压块14对准源壳,进一步,第一气缸10伸出,压块14下压源壳确保放射性核素全部进入源壳内;最后,第二气缸17再次回缩;
70.e、第二次焊接:丝杠滑台直线模组4驱使回转夹紧气缸3夹持内置放射性核素的源壳移动至焊接位,充气管22喷射氮气向源壳开口喷射惰性气体,激光焊接枪9发射激光对源壳端部进行焊接;
71.f、籽源收集:回转夹紧气缸3夹持籽源至收料机构处,第二摄像机8拍照,在第二摄像机8拍照时,第三气缸26伸出,背光源25上升并打开,待第二摄像机8拍摄后,第三气缸26回缩,背光源25下降并关闭,待控制器接收第二摄像机8拍摄的照片并判断其是否合格后,若籽源为合格品,则,丝杠滑台直线模组4驱使回转夹紧气缸3移动籽源至合格料筒701上方,并释放籽源经过感应器14后进入合格料筒701;若籽源为废品(源壳两端未实现全封闭),则,丝杠滑台直线模组4驱使回转夹紧气缸3移动籽源至废料筒702上方,释放籽源经过感应器14后进入废料筒702,若感应器14未感应到有籽源经过,则,吹气管23向下吹气直至感应器14感应到籽源经过为止;
72.g、复位;
73.h、重复上述步骤a至g。
74.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。