1.本发明属于喷雾降温风扇技术领域,具体属于一种基于计算机视觉技术的喷雾降温风扇控制系统及方法。
背景技术:
2.凉爽、绿色的夏季室外热环境可以满足人们休闲、锻炼和游玩的舒适性。在炎热的夏季,大部分地区的室外长期存在热环境温度过高等问题,人们更愿意长期待在室内空调房间中,而不愿意“走出去”。这不仅增加了人们患病态建筑综合征的风险,不利于身心健康的长期发展,还大大增加了建筑运行能耗和碳排放量。
3.室外热环境中广泛使用的遮阳、喷雾降温风扇、喷雾降温装置能耗较大,加之并未使室外热环境达到室外人员休息或活动所需的热舒适水平。遮阳棚仅能遮挡住太阳,虽使光照大大减少了紫外线对人体的照射,但在高温情况下其降温效果并不明显,并且设置遮阳棚影响景观协调性;普通喷雾降温风扇使人与周围的室外热空气进行强迫对流热交换,在夏季高温时室外平均气温高达40℃,人体通过吹喷雾降温风扇而进行的散热效果将会大打折扣,并且喷雾降温风扇位置固定,功能单一,当人离喷雾降温风扇有一定距离时其效果不佳。
4.现有的利用喷雾进行降温的喷雾降温风扇以及喷雾降温管网虽然对热环境的改善更近了一步,但因为它们位置相对固定,且无法根据环境内人员数量、人员不舒适状态对热环境进行及时、精确、精准的降温,导致这种室外热环境降温方法仍存在时间上的滞后以及温度、湿度上的偏差。其次喷雾降温装置往往以某一区域的温湿度参数状态以及专业人员的经验来进行调节,这并不能满足拥有不同热偏好的人群实际的热需求,也不利于节能。
5.目前室外热环境喷雾降温风扇及喷雾降温管网被广泛使用,其控制系统仍存在诸多局限性,例如:
6.1.在室外活动人员活动轨迹多变,每日每时各个公共活动区域内人员数量不一,现有喷雾管网无法根据降温区域内人员活动情况控制该区域喷雾管网的开与关,以及根据人员数量和活动情况按需调整喷雾量的大小,既不能为区域内人员提供良好舒适的热环境,又造成水资源以及电能的浪费。并且喷雾管网仅含有喷雾降温并未配有喷雾降温风扇加以辅助,其降温效果较喷雾降温风扇差。
7.2.现有的喷雾降温风扇相比于喷雾管网,虽然加有喷雾降温风扇使之降温范围较大、对流换热的效果更强,但其无法实时获取室外活动人员的热舒适情况。导致人员处于被动的状态,喷雾降温系统温度和湿度的控制并不能由在此环境中活动的人员来调控,而是由(非)专业管理人员凭经验并依据此区域内某一处根据温湿度仪测得的温度和湿度来对其进行控制。因此,不能准确有效地、迅速地对喷雾降温系统进行相应的反馈及控制。
8.3.喷雾降温风扇和喷雾管网均有位置固定使得无法根据人员数量及分布情况进行移动的缺陷,缺少智能化与人性化,因此造成了不必要的资源耗费。
技术实现要素:
9.为了解决现有技术中存在的问题,本发明提供一种基于计算机视觉技术的喷雾降温风扇控制系统及方法,解决了现有技术无法满足夏季室外人员热舒适的问题。
10.为实现上述目的,本发明提供如下技术方案:一种基于计算机视觉技术的喷雾降温风扇控制系统,包括数据采集系统、信息处理系统、移动控制系统、智能语音交互系统和末端控制系统,其中:
11.数据采集系统用于采集控制区域内的人员姿态、面部皮肤温度和定位,喷雾降温风扇的初始定位、室外空气温度和湿度与地面温度,并将室外空气温度与室外空气温度阈值进行比较,当室外空气温度大于室外空气温度阈值则将上述数据信息传输至信息处理系统;
12.信息处理系统用于获取数据采集系统采集的数据信息,并对数据信息进行优化得到群体热感觉值、喷雾降温风扇最佳位置和喷雾降温风扇移动的实时避障信息,对群体热感觉值与群体热感觉阈值进行比较,当群体热感觉值大于群体热感觉阈值时,信息处理系统通过喷雾降温风扇初始定位、喷雾降温风扇最佳位置和喷雾降温风扇移动的实时避障信息获取喷雾降温风扇移动最优路线,并将喷雾降温风扇移动最优路线信息传输至移动控制系统,将群体热感觉值传输至末端控制系统;
13.移动控制系统用于根据喷雾降温风扇移动最优路线和喷雾降温风扇移动的实时避障信息控制喷雾降温风扇移动到最佳位置,并将移动控制系统的位置信息传输至智能语音交互系统;
14.智能语音交互系统用于获取喷雾降温风扇的位置信息并对喷雾降温风扇周围的人员进行开启喷雾和/或风扇的询问,获取的人员语音指令传输至末端控制系统;
15.末端控制系统用于获取人员语音指令,并根据群体热感觉值对喷雾降温风扇的开度进行控制。
16.进一步的,所述数据采集系统包括人员数据采集模块、环境数据采集模块和定位模块,其中:
17.人员数据采集模块包括设置在喷雾降温风扇顶部的摄像头和红外温度传感器,摄像头用于获取人员姿态的数字图像矩阵、人员分布与人员密度信息和人员面部皮肤温度,红外温度传感器用于与摄像头一起获取人员面部皮肤温度;
18.环境数据采集模块包括在喷雾降温风扇顶部太阳能光伏发电板下的空气温度传感器、空气湿度传感器、红外温度传感器,空气温度传感器用于采集控制区域内喷雾降温风扇附近的空气温度信息,空气湿度传感器用于采集控制区域内喷雾降温风扇附近的空气湿度信息,红外温度传感器用于采集控制区域内喷雾降温风扇附近的地面温度信息;
19.定位模块包括喷雾降温风扇定位器和超声波测距仪,喷雾降温风扇定位器用于运用gps采集喷雾降温风扇定位信息,超声波测距仪用于获取人员与喷雾降温风扇之间相对距离,并将相对距离和人员分布与人员密度信息结合得到人员在地图中的定位。
20.进一步的,所述信息处理系统包括优化检测模块、最优路线选择模块和超声波避障模块,具体的:
21.优化检测模块用于对采集到的人员面部皮肤温度、控制区域内室外空气温度和湿度、地面温度与人体热感觉之间的数学模型进行修正,得到每个人的热感觉值,并通过模糊
综合评价方法将控制区域内每个人的热感觉值整合得到群体热感觉值,当群体热感觉值大于群体热感觉阈值时,将群体热感觉值传输至超声波避障模块、最优路线选择模块和末端控制系统;
22.超声波避障模块用于发射和接收超声波信息,得到喷雾降温风扇、人员和障碍物之间的距离信息从而得到喷雾降温风扇移动的实时避障信息以及人员在控制区域中的定位坐标,并将定位坐标中人员数量最多的区域设定为目标区域,目标区域周围0.5米并距离喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置,将喷雾降温风扇移动的实时避障信息与喷雾降温风扇最佳位置信息发送至最优路线选择模块;
23.最优路线选择模块用于获取喷雾降温风扇移动的实时避障信息与喷雾降温风扇最佳位置信息并通过蚁群算法计算得到从喷雾降温风扇初始定位到喷雾降温风扇最佳位置的最优路线,并将最优路线信息传输至移动控制系统。
24.进一步的,末端控制系统接收智能语音交互系统获取的开启风扇和/或喷雾装置的人员语音指令时,末端控制系统按照优化检测模块得到的群体热感觉值对应的风扇档位和喷雾水流量阀开度调节风扇和/或喷雾的开度;
25.末端控制系统接收智能语音交互系统获取的关闭喷雾降温风扇或喷雾装置的人员语音指令,或获取的群体热感觉值小于群体热感觉阈值时,末端控制系统控制风扇和/或喷雾装置关闭;
26.进一步的,还包括生物实时机器学习系统,生物实时机器学习系统用于存储人员面部皮肤温度、室外空气温度、室外空气湿度、室外地面温度、群体热感觉值、人员分布信息、喷雾降温风扇移动最优路线以及调控后的风扇档位和/或喷雾水量信息,并根据上述数据得到人员活动区域偏好与群体热偏好。
27.进一步的,还包括报警系统,所述报警系统用于对喷雾降温风扇水箱的水位信息和蓄电池的剩余电量信息进行报警与警示,当水箱存水量不足30%和/或蓄电池的剩余电量不足20%时报警系统进行报警,信息处理系统获取报警信息并根据喷雾降温风扇的定位信息,利用蚁群算法得到喷雾降温风扇从此位置到储水室的最优路线并传输至移动控制系统,移动控制系统驱动喷雾降温风扇移动至储水室。
28.进一步的,喷雾降温风扇还包括地面降温系统,所述地面降温系统用于对控制区域内的室外地面进行降温,1)当智能语音交互系统直接获取的人员指令为开启风扇和/或喷雾的人员语音指令时,所述地面降温系统不开启;
29.2)当数据采集系统采集到的室外空气温度不大于室外空气温度阈值,或未捕捉到人员热姿态,或信息处理系统得到的群体热感觉值不大于群体热感觉阈值或末端控制系统获取的是不需要开启风扇和/或喷雾的人员语音指令,则数据采集系统获取室外地面温度并与室外地面温度阈值进行对比,当室外地面温度大于室外地面温度阈值时,数据采集系统将控制区域地图划分为1*1m2个小方格,获取每个小方格中心温度,得到所有室外地面温度超过室外地面温度阈值的小方格;
30.信息处理系统获取喷雾降温风扇此时定位信息,使用蚁群算法得到从喷雾降温风扇此时定位并经过需要降温的小方格中心点的最优路线;
31.移动控制系统根据喷雾降温风扇移动最优路线控制喷雾降温风扇移动,同时地面降温系统控制喷雾降温风扇的地面喷雾开启为地面降温;
32.当喷雾降温风扇达到最终位置时移动控制系统控制喷雾降温风扇停止移动,地面降温系统控制地面喷雾关闭;当数据采集系统获取的室外地面温度小于室外地面温度阈值时,地面降温系统不开启。
33.进一步的,所述群体热感觉值tsvq的计算公式为:
34.tsvq=a1tsv1 a2tsv2
…
antsvm35.其中,tsvq为控制区域内的群体热感觉值,为控制区域内每个人实时热感觉的线性函数;a
n-第m个人热感觉值权重因子,代表第m个人的热感觉值对群体热感觉值的影响程度,对于夏季室外热环境区域调控,区域内所有人员的权重可设置为均等,即若控制区域内某人员热感觉值超过上限阈值,则将此人员权重因子适当提高,以优先满足此人员的热舒适性;tsv
n-第m个人的实时热感觉值;
36.群体热感觉值与风扇和/或喷雾开度的对应关系具体如下:
[0037][0038]
本发明还提供一种基于计算机视觉技术的喷雾降温风扇的控制方法,包括以下步骤:
[0039]
s1获取喷雾降温风扇控制区域的地图信息,室外空气温度、湿度,地面温度,将室外空气温度与室外空气温度阈值进行对比,若室外空气温度大于室外空气温度阈值,则进行步骤s2;
[0040]
s2获取喷雾降温风扇控制区域的视频信息,判断控制区域内是否有人员活动并判断活动人员的热姿态,若控制区域内有人员出现热姿态,则获取人员面部皮肤温度;
[0041]
s3根据人员面部皮肤温度、室外空气温度、室外空气湿度与地面温度得到人体热感觉值,获取控制区域中所有人员的人体热感觉值得到控制区域内的群体热感觉值,将群体热感觉值与群体热感觉阈值进行对比,若群体热感觉值大于群体热感觉阈值,则进行步骤s4;
[0042]
s4、获取人员在控制区域内二维定位坐标以及喷雾降温风扇的初始定位,以控制区域内人员数量最多的区域为目标区域,用矩形框将目标区域内人员框在矩形边框上及边框内,选取矩形框外0.5米并距喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置,通过蚁群算法得到移动式喷雾降温风扇从初始定位到喷雾降温风扇最佳位置的最优路线;
[0043]
s5根据最优路线控制喷雾降温风扇移动至喷雾降温风扇最佳位置;
[0044]
s6询问目标区域内人员是否开启风扇、是否开启喷雾;
[0045]
s7若需要开启风扇和/或喷雾,则控制风扇和/或喷雾开启到群体热感觉值对应的
档位和/或流量。
[0046]
进一步的,s8若步骤s1室外空气温度不大于室外空气温度阈值、或步骤s2未捕捉到人员热姿态、或步骤s3群体热感觉值不大于群体热感觉阈值,但需要开启风扇和/或喷雾时,不比较地面温度与地面温度阈值;
[0047]
s9若步骤s1室外空气温度不大于室外空气温度阈值、或步骤s2未捕捉到人员热姿态、或步骤s3群体热感觉值不大于群体热感觉阈值、或步骤s6不需要开启风扇和喷雾时,则比较地面温度与地面温度阈值,若地面温度大于地面温度阈值,则进行步骤s10:
[0048]
s10将控制区域地图划分为1*1m2个小方格,获取每个小方格中心温度,得到所有室外地面温度超过室外地面温度阈值的小方格,获取喷雾降温风扇此时的定位信息,使用蚁群算法得到从喷雾降温风扇此时定位并经过需要降温的小方格中心点的最优路线;
[0049]
s11控制喷雾降温风扇按照最优路移动并对地面进行降温。
[0050]
与现有技术相比,本发明至少具有以下有益效果:
[0051]
本发明提供一种基于计算机视觉技术的喷雾降温风扇控制系统,包括数据采集系统、信息处理系统、移动控制系统、智能语音交互系统和末端控制系统,数据采集系统通过多种非接触式测量方式对热环境中人员热舒适进行实时监测,提高了采集信息的准确性和实时性,达到人体热舒适和节能;通过信息处理系统实时根据人体皮肤温度和热感觉信息对喷雾降温风扇的风量与喷雾量进行调节,对喷雾降温风扇进行移动路线规划,通过移动控制系统使喷雾降温风扇移动到最优降温及喷雾地点,使喷雾降温风扇移动性增强、灵活性提高,通过智能语音交互系统和末端控制系统对喷雾降温风扇的开启进行智能化与人性化控制,使环境中的人员真正成为控制环境温度优化设备喷雾降温风扇的主体,从而对人员进行精准降温,快速满足热环境调控与人员热需求。
[0052]
进一步的,本发明数据采集系统包括人员数据采集模块、环境数据采集模块和定位模块,利用人员数据采集模块、环境数据采集模块和定位模块进行非接触式测量,并将多种非接触式测量方式的测量结果进行相互验证以防误判提高系统控制精度和鲁棒性,同时结合计算机视觉、生物实时机器学习系统,提高了本发明数据采集系统采集信息的准确性和实时性。
[0053]
进一步的,本发明通过喷雾降温风扇信息处理系统的优化检测模块获取控制区域内人员的群体热感觉值,最优路线选择模块根据控制区域内人员分布与人员密度和超声波避障模块得到喷雾降温风扇的目标区域进行喷雾降温风扇的移动规划路线,根据规划好的移动规划路线使喷雾降温风扇安全、准确地移动到最优降温及喷雾地点,喷雾降温风扇移动性增强、灵活性提高,实现对人员进行精准降温。
[0054]
进一步的,本发明通过信息处理系统的优化检测模块对数据采集系统中数据的特征进行分析,并提取出少量且具有代表性的数据,简化数据信息处理过程,提高了本发明系统控制的精度与速度。
[0055]
本发明的一种基于计算机视觉技术的喷雾降温风扇的控制方法,根据控制区域内人员所在位置、分布密度以及环境温度情况来开启喷雾降温风扇对人员热感觉和路面温度进行实时、精确的降温与除尘,这既满足了热环境中人员的热舒适度与环境空气质量要求,也保证了路面路面温度处于良好状态,达到了低碳绿色、环保节能、以人为本的目的与效果。
[0056]
进一步的,本发明的控制方法可以实时地根据此环境中人体皮肤温度和热感觉信息对喷雾降温风扇的风量与喷雾量进行调节,并且具备智能化与人性化,使环境中的人员真正成为控制环境温度优化设备喷雾降温风扇的主体。
附图说明
[0057]
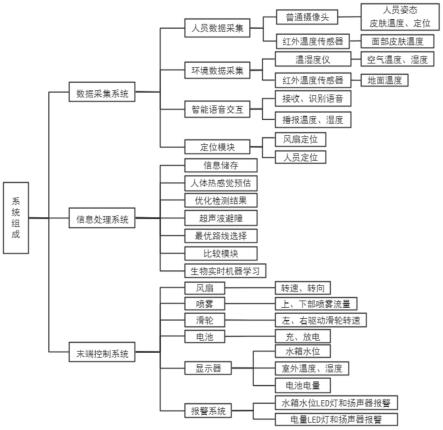
图1是本发明的一种基于计算机视觉技术的喷雾降温风扇控制系统结构示意图;
[0058]
图2是本发明的一种基于计算机视觉技术的喷雾降温风扇控制系统的工作流程图;
[0059]
图3是本发明控制系统控制喷雾降温风扇温度和喷雾的控制逻辑图;
[0060]
图4是本发明基于计算机视觉技术的喷雾降温风扇的结构示意图。
[0061]
附图中:1风扇;2喷雾;3超声波测距换能器;4舵机;5红外温度传感器;6电量报警器;7水量报警器;8地面喷雾;9左驱动轮;10右驱动轮;11显示器;12语音播报孔;13摄像头;14红外地面温度传感器。
具体实施方式
[0062]
下面结合附图和具体实施方式对本发明作进一步的说明。
[0063]
如图1-4所示,本发明提供一种基于计算机视觉技术的智能可移动喷雾降温风扇系统,包括数据采集系统、信息处理系统、移动控制系统、智能语音交互系统、末端控制系统、生物实时机器学习系统、报警系统和地面降温系统;
[0064]
1.数据采集系统用于采集控制区域内的人员姿态、面部皮肤温度和定位以及喷雾降温风扇的初始定位、空气温度和湿度与地面温度,并将室外空气温度与室外空气温度阈值进行比较,当室外空气温度大于室外空气温度阈值则将上述数据信息传输至信息处理系统;
[0065]
数据采集系统具体包括人员数据采集模块、环境数据采集模块和定位模块;
[0066]
1.1人员数据采集模块用于采集人员姿态、面部皮肤温度与定位;具体包括摄像头13和红外温度传感器5,红外温度传感器5采集人员面部皮肤温度信息,摄像头13用于采集人员视频信息,摄像头13中内置有骨骼节点识别模块、欧拉视频放大模块和yolov5模块,骨骼节点识别模块采用openpose算法,用于获取人员姿态的数字图像矩阵;欧拉视频放大模块采用欧拉视频放大算法,用于获取人员面部皮肤温度;yolov5模块采用yolov5算法,用于获取人员分布和人员密度信息。
[0067]
人员数据采集模块中红外温度传感器5与摄像头13同时获取人员面部皮肤温度以进行交叉验证提高的检测精度与鲁棒性。
[0068]
1.2环境数据采集模块用于采集控制区域内喷雾降温风扇附近的空气温度、空气湿度与控制区域内的地面温度;具体包括空气温度传感器、空气湿度传感器、红外地面温度传感器14,其中,空气温度传感器用于采集空气温度信息,空气湿度传感器用于采集空气湿度信息,红外地面温度传感器14用于采集地面温度信息;
[0069]
1.3定位模块用于进行喷雾降温风扇定位和人员定位,具体包括喷雾降温风扇定位器和超声波测距仪;喷雾降温风扇定位器设置在喷雾降温风扇下部,喷雾降温风扇定位器运用gps采集喷雾降温风扇定位信息,超声波测距仪测得的人员与喷雾降温风扇之间相
对距离,根据人员数据采集模块的yolov5算法获得的人员分布和人员密度信息与超声波测距仪测得的人员与喷雾降温风扇之间相对距离得到人员在地图中的定位。
[0070]
2.信息处理系统用于获取数据采集系统采集的数据信息,并对数据信息进行优化得到群体热感觉值、喷雾降温风扇最佳位置和喷雾降温风扇移动的实时避障信息,对群体热感觉值与群体热感觉阈值进行比较,当群体热感觉值大于群体热感觉阈值时,信息处理系统通过喷雾降温风扇初始定位、喷雾降温风扇最佳位置和喷雾降温风扇移动的实时避障信息获取喷雾降温风扇移动最优路线,并将喷雾降温风扇移动最优路线信息传输至移动控制系统,将群体热感觉值传输至末端控制系统;
[0071]
信息处理系统具体包括优化检测模块、最优路线选择模块和超声波避障模块;
[0072]
2.1优化检测模块用于对采集到的人员面部皮肤温度、控制区域内室外空气温度和湿度、地面温度与人体热感觉之间的数学模型进行修正,得到每个人的热感觉值,对每个人的热感觉值进行优化整合通过模糊综合评价方法得到群体热感觉值,当群体热感觉值大于群体热感觉阈值时,将群体热感觉值传输至超声波避障模块、最优路线选择模块和末端控制系统;
[0073]
2.2超声波避障模块用于发射和接收超声波信息,得到喷雾降温风扇、人员和障碍物之间的距离信息以及人员在控制区域中的定位坐标,并将定位坐标中人员数量最多的区域设定为目标区域,目标区域周围0.5米并距离喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置,将喷雾降温风扇移动的实时避障信息与喷雾降温风扇最佳位置信息发送至最优路线选择模块;
[0074]
优选的,距离信息包括喷雾降温风扇还未移动时人员相对于喷雾降温风扇的位置和喷雾降温风扇移动过程中移动人员(障碍物)的距离;
[0075]
2.3最优路线选择模块用于获取喷雾降温风扇移动的实时避障信息与喷雾降温风扇最佳位置信息并通过蚁群算法计算得到从喷雾降温风扇初始定位到喷雾降温风扇最佳位置的最优路线,并将最优路线信息传输至移动控制系统。
[0076]
3.移动控制系统用于根据喷雾降温风扇移动最优路线和喷雾降温风扇移动的实时避障信息控制位于喷雾降温风扇底部的左驱动轮9与右驱动轮10驱动喷雾降温风扇移动到最佳位置,并将移动控制系统的位置信息传输至智能语音交互系统;
[0077]
4.智能语音交互系统用于获取喷雾降温风扇的位置信息并对喷雾降温风扇周围的人员进行开启喷雾2和/或风扇1的询问,并接收、识别外界输入的语音信息,并通过喷雾降温风扇上的语音播报孔12播报空气温度和空气湿度信息,将获取的人员语音指令传输至末端控制系统;
[0078]
5.末端控制系统用于获取人员语音指令,并根据群体热感觉值对喷雾降温风扇的开度进行控制,具体的:
[0079]
末端控制系统接收智能语音交互系统获取的开启喷雾2和/或风扇1装置的人员语音指令时,末端控制系统按照优化检测模块得到的群体热感觉值对应的风扇档位和/或喷雾水流量阀开度调节喷雾2和/或风扇1的开度;
[0080]
末端控制系统接收智能语音交互系统获取的关闭喷雾2和/或风扇1装置的人员语音指令,或获取的群体热感觉值小于群体热感觉阈值时,末端控制系统控制喷雾2和/或风扇1装置关闭;
[0081]
末端控制系统包括末端控制器,末端控制系统中末端控制器根据获取的最优路线对末端设备进行控制,末端设备包括风扇1、喷雾2、太阳能光伏板15、蓄电电池、显示器11、太阳能光伏板15将太阳光转化为可利用的电能并存储在蓄电电池中,蓄电电池中的电能为喷雾降温风扇持续提供电能,显示器11可实时显示水箱水位、电池剩余电量、室外空气温度、室外空气湿度、喷雾降温风扇档位与喷雾水流量;
[0082]
6.生物实时机器学习系统用于存储人员面部皮肤温度、室外空气温度、室外空气湿度、室外地面温度、群体热感觉值、人员分布信息、喷雾降温风扇移动最优路线以及调控后的风扇档位和/或喷雾水量信息,并根据上述数据得到人员活动区域偏好与群体热偏好。
[0083]
7.报警系统用于对喷雾降温风扇水箱的水位信息和蓄电池的剩余电量信息进行报警与警示,包括水箱水位报警模块、电量报警模块,当水箱存水量不足30%和/或蓄电池的剩余电量不足20%时报警系统进行报警,信息处理系统获取报警信息并根据喷雾降温风扇的定位信息,利用蚁群算法得到喷雾降温风扇从此位置到储水室的最优路线并传输至移动控制系统,移动控制系统驱动喷雾降温风扇的左驱动轮9、右驱动轮10移动至储水室。
[0084]
8.地面降温系统用于对控制区域内的室外地面进行降温:
[0085]
1)当智能语音交互系统直接获取的人员指令为开启风扇1和/或喷雾2的人员语音指令时,地面降温系统不开启;
[0086]
2)当数据采集系统采集到的室外空气温度不大于室外空气温度阈值,或未捕捉到人员热姿态,或信息处理系统得到的群体热感觉值不大于群体热感觉阈值或末端控制系统获取的是不需要开启风扇1和/或喷雾2的人员语音指令,则数据采集系统获取室外地面温度并与室外地面温度阈值进行对比,当室外地面温度大于室外地面温度阈值时,数据采集系统将控制区域地图划分为1*1m2个小方格,获取每个小方格中心温度,得到所有室外地面温度超过室外地面温度阈值的小方格;
[0087]
信息处理系统获取喷雾降温风扇此时的定位信息,使用蚁群算法得到从喷雾降温风扇此时定位并经过需要降温的小方格中心点的最优路线;
[0088]
移动控制系统根据喷雾降温风扇移动最优路线控制喷雾降温风扇移动,同时地面降温系统控制喷雾降温风扇的地面喷雾8开启为地面降温;
[0089]
当喷雾降温风扇达到最终位置时移动控制系统控制喷雾降温风扇停止移动,地面降温系统控制地面喷雾8装置关闭;当数据采集系统获取的室外地面温度小于室外地面温度阈值时,地面降温系统不开启。进一步,人体数据采集模块的摄像头13与红外温度传感器5设置在喷雾降温风扇下部。
[0090]
进一步,环境数据采集模块的空气温度传感器和空气湿度传感器设置在喷雾降温风扇下部壳体内,壳体上留有通风孔洞,红外地面温度传感器14设置在喷雾降温风扇下部。
[0091]
进一步,优化检测模块中的最优路线规划采用蚁群算法搜索最短路径。
[0092]
进一步,摄像头内置有骨骼节点识别模块,骨骼节点识别模块中采用openpose算法识别与人体热调节机构有关的人体热姿态。openpose算法利用多人图像中2d姿态检测方法paf(part affinity fields),采用bottom-up的方式,先检测出人员的各个关节点,然后再将各个关节点与个体联系起来,完成多人图像中的姿态检测。openpose算法主要包括四个步骤:神经网络;找到关节;找到肢体连接;拼装肢体构成人。
[0093]
进一步,摄像头内置有欧拉视频放大模块,欧拉视频放大模块采用欧拉视频放大
算法,对采集到的人员面部图像信息进行傅里叶变换得到人员肤色饱和度,皮肤温度与肤色饱和度存在一定的线性关系,经过转换得到人员面部皮肤温度。
[0094]
进一步,摄像头内置有yolov5模块,yolov5模块采用yolov5算法,yolov5算法采用单阶段检测方法(one-stage),快速获得实时的人员定位信息。
[0095]
进一步,人员面部皮肤温度、室外空气温度、室外空气湿度、地面温度与人体热感觉之间的数学模型采用如下公式:
[0096]
tsvi=a k1×
ta k2×
rha k3×
t
1i
k4×
t
2i
k5×
tf[0097]
其中,tsvi为第i个人的热感觉值,为人员面部皮肤温度、室外空气温度、室外空气湿度、地面温度的线性函数;
[0098]
t
a-室外空气温度;
[0099]
rh
a-室外空气湿度;
[0100]
t
1i-欧拉视频放大模块计算得到的第i个人员的面部皮肤温度;
[0101]
t
2i-红外温度传感器5采集到的第i个人员的面部皮肤温度;
[0102]
t
f-红外地面温度传感器14采集到的地面温度;
[0103]
k1、k2、k3、k4、k
5-线性回归模型的参数;
[0104]
a-截距。
[0105]
进一步,在不同时间相同的室外热环境状态下,同一人员的热感觉有一定的波动,其活动水平和代谢率在不断发生变化,因此控制区域内各个人员不同时刻的热感觉也存在差异,人员数据采集模块实时的获取了每个人员的热感觉。由于同一时间相同的室外热环境状态下,不同人员的运动状态不完全相同,且即使同一运动状态下不同人员也有着个性化的舒适温度范围,因此控制区域内各个人员的热感觉存在差异。实时地获取每个员的热感觉后,需要对多人员的群体热感觉进行评判,使室外环境的智能调控能够尽可能满足大多数人员热舒适性的要求,使用模糊综合评价方法,所述方法中群体热感觉值tsvq计算公式为:
[0106]
tsvq=a1tsv1 a2tsv2
…
antsvm[0107]
其中,tsvq为控制区域内的群体热感觉值,为控制区域内每个人实时热感觉的线性函数;
[0108]an-第m个人热感觉值权重因子,代表第m个人的热感觉值对群体热感觉值的影响程度,对于夏季室外热环境区域调控,区域内所有人员的权重可设置为均等,即若控制区域内某人员热感觉值超过上限阈值,则将此人员权重因子适当提高,以优先满足此人员的热舒适性;
[0109]
tsv
n-第m个人的实时热感觉值。
[0110]
热感觉投票是人体对周围热环境是“冷”还是热的主观反应与描述,根据ashrae 55(2020)采用7点标度及相对应的喷雾降温风扇的风扇1档位与喷雾2水流量:
[0111][0112]
进一步,定位模块使用gps确定了喷雾降温风扇初始位置,根据人员数据采集模块得到人员分布信息后,在优化检测模块中以喷雾降温风扇从初始定位位置到最终最佳位置,当人员分布信息与喷雾降温风扇初始位置确定后,超声波避障模块的超声波测距换能器3通过发射和接收超声波测量控制区域内人员与喷雾降温风扇的相对位置,得到人员在控制区域中的定位坐标,定位坐标中人员数量最多的区域为目标区域,用矩形框将目标区域内人员框在矩形边框上及边框内,以矩形区域外0.5米并距离喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置,最终以移动路径最短为准则,避开固定障碍物,使用蚁群算法得到智能喷雾降温风扇的最优路径,尽可能做到路径上的优化使成本最低。
[0113]
进一步,控制区域内存在非固定的人员的移动,为避免区域内人员磕碰与机器受损,在智能喷雾降温风扇移动过程中超声波避障模块实时地测量喷雾降温风扇行进道路上喷雾降温风扇与障碍物的距离。超声波避障模块采用超声波测距换能器3,超声波测距换能器3搭载在180
°
舵机4上,能够实时发射并接收超声波,并随着舵机4的转动测量每个角度障碍物的距离。
[0114]
如图2所示,本发明还公开了基于计算机视觉技术的室外热环境喷雾降温风扇控制系统的控制方法,包括以下步骤:
[0115]
s1、确定喷雾降温风扇的控制区域,获取控制区域地图信息;
[0116]
s2、获取喷雾降温风扇控制区域的室外空气温度ta、室外空气湿度rha和地面温度tf,将获取的室外空气温度ta与设定的室外空气温度阈值进行对比,若室外空气温度ta大于室外空气温度阈值则需要进行以下步骤;
[0117]
s3、获取喷雾降温风扇的控制区域中的人员视频信息,判断控制区域内是否有人员活动并判断活动人员的热姿态,若控制区域内有人员出现热姿态,则使用欧拉视频放大算法和红外传感器获取人员面部皮肤温度;
[0118]
s4、根据人员面部皮肤温度、室外空气温度、室外空气湿度、地面温度与人体热感觉间的数学模型进行修正得到控制区域内所有人员的人体热感觉,通过模糊综合评价方法对控制区域内采集到的所有人员人体热感觉值进行计算,得到控制区域内的群体热感觉值,将获得的群体热感觉值与设定群体热感觉阈值进行对比,若群体热感觉值小于群体热感觉阈值,则不需要开启喷雾降温风扇1和喷雾2;若群体热感觉值大于群体热感觉阈值,即进行步骤s5;
[0119]
具体的,热姿态包括“擦汗”、“用手扇风”、“抖t恤”、“搔头”、“卷起袖子”等,
[0120]
s5、获取人员在控制区域内二维定位坐标以及喷雾降温风扇的初始定位,将地图中人员数量最多的区域作为目标区域,并用矩形框将目标区域内人员框在矩形边框上及边
框内,以矩形区域外0.5米并距离喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置;
[0121]
s6、利用喷雾降温风扇的初始定位和喷雾降温风扇最佳位置,通过蚁群算法得到喷雾降温风扇移动的最优路线;
[0122]
s7、喷雾降温风扇按照最优路线移动至最佳位置;
[0123]
如图3所示,s8、询问控制区域的目标区域内人员是否需要开启风扇1和/或喷雾2,并获取反馈的语音信息,若需要开启风扇1和/或喷雾2,末端控制器给喷雾降温风扇风机或喷雾水流量阀发出控制指令,让喷雾降温风扇按照群体热感觉值对应的风扇档位和/或喷雾流量开启,同时存储室外空气温度值、室外空气湿度、群体热感觉值、人员分布信息和最优路线;
[0124]
s9若步骤s2室外空气温度不大于室外空气温度阈值、或步骤s3未捕捉到人员热姿态、或步骤s4群体热感觉值不大于群体热感觉阈值,但需要开启风扇1和/或喷雾2时,不比较地面温度与地面温度阈值;
[0125]
s10、若步骤s2室外空气温度不大于室外空气温度阈值、步骤s3未捕捉到人员热姿态、步骤s4群体热感觉值不大于群体热感觉阈值或步骤s8不需要开启风扇1和/或喷雾2,则对地面温度与地面温度阈值进行对比,若地面温度大于地面温度阈值,则需要进行以下步骤;
[0126]
s11、将控制区域地图划分为1*1m2个小方格,每个小方格中心为红外地面温度传感器14测量点,通过红外地面温度传感器14测量控制区域内所有小方格中心点温度,得到所有室外地面温度超过室外地面温度阈值的小方格及其中心点。通过gps获取喷雾降温风扇此时的定位信息,使用蚁群算法得到从喷雾降温风扇此时定位并经过需要降温的小方格中心点的最优路线;
[0127]
s12、移动控制系统控制向左驱动轮9、右驱动轮10、末端控制系统控制地面喷雾8开启,让喷雾降温风扇按照最优路线移动并进行喷雾。
[0128]
实施例1
[0129]
在对实际夏季室外控制区域人员降温调控时,是在控制区域内有人员出现的基础上再做进一步的调控,并且还需要设备根据人员的分布情况进行移动,因此需要先通过摄像头1获取控制区域内是否存在人员,进一步获取人员的面部皮肤温度,再根据人员的分布信息计算获得最优路径。
[0130]
摄像头中依靠内置骨骼节点识别模块,骨骼节点识别模块利用openpose算法获取人体关节点主要包括
①
神经网络预测;
②
关节的寻找;
③
肢体连接点的寻找;
④
拼接肢体构成人四个步骤。摄像头拍摄到控制区域内有人员活动时,随后使用openpose算法提取视频信息中的图像特征,实时获得人员热姿态与数据库中的热姿态进行对比,热姿态包括“擦汗”、“用手扇风”、“抖t恤”、“搔头”、“卷起袖子”等,如摄像头识别到“用手扇风”的姿态特征时骨骼节点识别模块向下一个流程发出指令。
[0131]
欧拉视频放大算法对采集到的人员面部图像实时地进行傅里叶变换得到人员面部皮肤色彩饱和度,人员皮肤温度与皮肤色彩饱和度呈较好的线性关系,最终得到人员的面部皮肤温度。欧拉视频放大算法参考《phase-based video motion processing》中第三部分。实际在控制区域内使用采集的视频图像获取人员面部皮肤温度可能会存在干扰,如
在夏季室外热环境中人员为了遮阳会带有帽子等配饰遮挡脸部,使得使用欧拉视频放大算法采集的人员面部皮肤温度与实际温度存在差异,为了提高人员面部温度监测的准确性并避免误判,同时使用红外温度传感器5对人员面部皮肤温度进行实时监测采集。两种采集方式得到的人员面部皮肤温度被储存到信息存储模块,并发送至信息处理系统的人员热感觉预估模块进行下一步流程。
[0132]
更优地,每个人的热感觉值会随着活动强度、服装热阻和室外环境参数的变化而变化,需要实时的获取人员热感觉值。
[0133]
信息处理系统还包括人员热感觉预估模块,人体热感觉不仅于人员面部皮肤温度强相关,还与控制区域内的室外空气温度、室外空气湿度、地面温度有关系。人体热感觉预估模块实时接收数据采集系统采集到的人员数据与环境数据,通过统计学习方法得到以上数据与人体热感觉值间的数学模型:
[0134]
tsvi=a k1×
ta k2×
rha k3×
t
1i
k4×
t
2i
k5×
tf[0135]
其中,ta为室外温度测量仪测得的室外空气温度;
[0136]
rha为室外湿度测量仪测得的室外空气湿度;
[0137]
t
1i
为摄像头中欧拉视频放大模块计算得到的第i个人员的面部皮肤温度;
[0138]
t
2i
为红外温度传感器5采集到的第i个人员的面部皮肤温度;
[0139]
tf为红外地面温度传感器14采集到的地面温度;
[0140]
k1、k2、k3、k4、k5为线性回归模型的参数;
[0141]
a为截距。
[0142]
在实际测量过程中每个人员对热环境的感受存在差异,需要计算多人员的群体热感觉值,以群体热感觉值作为群体对热环境的评判参数,以使室外环境的智能调控尽可能满足大多数人员的热舒适性的要求,本专利使用模糊综合评价方法:
[0143]
tsvq=a1tsv1 a2tsv2
…
antsvm[0144]
其中,tsvq为控制区域内的群体热感觉值,为控制区域内每个人实时热感觉的线性函数;
[0145]an-第m个人热感觉值权重因子,代表第m个人的热感觉值对群体热感觉值的影响程度,对于夏季室外热环境区域调控,区域内所有人员的权重可设置为均等,即若控制区域内某人员热感觉值超过上限阈值,则将此人员权重因子适当提高,以优先满足此人员的热舒适性;
[0146]
tsv
n-第m个人的实时热感觉值。
[0147]
通过以上方法得到的预测值接近真实值,但并不能完全代表控制区域内人员真实的热感觉值,还存在一定的误差,为了避免能源的浪费,在风扇1和/或喷雾2前需要通过智能语音交互系统询问控制区域内的人员是否需要开启风扇1和/或喷雾2,最终以智能语音交互系统接收到的人员回复信息为准,对风扇1和/或喷雾2进行相应的调控。
[0148]
摄像头中内置yolov5模块利用yolov5算法精确实时地获取人员分布与人与人员密度信息,yolov5算法采用单阶段(one-stage)的检测方法,即将输入图像直接放入深度神经网络中进行预测最终得到目标检测结果。更优地,舵机4移动到根据yolov5算法检测得到的人员目标与喷雾降温风扇的相对位置后,超声波避障模块的超声波测距换能器3通过发射和接收超声波测量控制区域内人员与喷雾降温风扇的相对位置,得到人员在控制区域地
图中的二维定位坐标,二维定位坐标中人员数量最多的区域外0.5米位置处为喷雾降温风扇最佳位置。
[0149]
通过摄像头识别到控制区域内人员出现热姿态且群体热感觉值大于群体热感觉阈时,利用yolov5算法获得人员定位信息后,则yolov5模块向下一个流程发出指令。
[0150]
优化检测模块中采用蚁群算法搜索喷雾降温风扇到最佳位置的最优路线,起始位置为喷雾降温风扇此时刻定位,终点位置为由人员分布信息优化得到的最佳位置,实现喷雾降温风扇移动以最小的工作代价(行走路径最短)且能避开障碍物达到最佳位置。蚁群算法aco是一种机率型算法,根据环境中各条路径的残留信息素的量来决定下一步的搜索方向。
[0151]
将喷雾降温风扇周围环境用一组数据进行表达,采用栅格法将周围环境看为一个二维平面,将平面分成一个个有着相同面积大小的栅格来建立二维的环境模型,每个栅格中存储着周围环境信息量。采用序号法标记环境地图信息,将环境信息转换成喷雾降温风扇可以识别的数据,即将栅格地图中栅格序号从1依次累加到最后一个栅格,第i个栅格对应的位置:
[0152][0153]
其中,x
i-第i个栅格x方向距离;
[0154]yi-第i个栅格y方向距离;
[0155]
a-每个小方格像素的边长;
[0156]
ceil(n)-取大于等于数值n的最小整数;
[0157]
mod(i,y)-i除以y的余数。
[0158]
每条从起点到终点的长度:
[0159][0160]
其中,d
si,sj-起点到终点的距离。
[0161]
喷雾降温风扇采用八叉树搜索策略,喷雾降温风扇在搜索过程中可以朝附近八个方向的相邻格栅进行自由移动。
[0162]
蚁群算法主要包括以下四个步骤:
[0163]
①
对相关参数进行初始化
[0164]
蚁群规模(蚂蚁数量)m、信息素重要程度因子α、启发函数重要程度因子β、信息素挥发因子ρ、信息素释放总量q、最大迭代次数k;
[0165]
②
按上式计算每个栅格至目标点的距离,启发式信息素取为至目标点距离的倒数,距离越短,启发式因子越大,障碍物处的启发式信息为0。建立矩阵d,用以存储每个栅格点至各自相邻无障碍栅格点的代价值;
[0166]
③
对于每一只蚂蚁,初始化蚂蚁爬行的路径及路径长度,将禁忌列表全部初始化为1;蚂蚁从起始点出发开始搜索路径,找出当前栅格点的所有无障碍相邻栅格点(即矩阵d中相应元素不为0的栅格点),再根据禁忌列表筛选出当前可选择的栅格点。
[0167]
④
如果起始点是目标点,且可选栅格点个数大于等于1,蚂蚁从当前栅格点转移到
各相邻栅格点的概率为:
[0168][0169]
其中,i、j分别为起点和终点;
[0170]
τ
i,j
(t)为时间t时由i到j的信息素强度;
[0171]
η
i,j
为能见度,是i、j路距离的倒数;
[0172]
α,β为两个常数,分别是信息素和能见度的加权值。
[0173]
根据轮盘赌的方法选择下一个栅格点;
[0174]
⑤
更新蚂蚁爬行的路径、路径长度、矩阵d和禁忌列表;
[0175]
⑥
重复步骤
④
和步骤
⑤
直到起始点为目标点或可选栅格点小于1.本次迭代中当前蚂蚁寻路完毕,记录该蚂蚁的行走路线;
[0176]
⑦
如果该蚂蚁最后一步是目标点,则计算路径长度与当前已知的最短路径长度做比较,若本次路径长度小于当前已知的最短路径长度,则更新当前最短路径长度及最短路径;如果该蚂蚁最后一步不是目标点,则只将路径长度记为0;
[0177]
⑧
重复步骤
③
到步骤
⑦
,直到m只蚂蚁完成一轮路径搜索,更新信息素:
[0178][0179]
τ
i,j
(n 1)=(1-ρ)τ
i,j
(n) δτ
i,j
(n)
[0180][0181]
其中,ck为第k只蚂蚁走完整条路径后所得到的总路径长度;
[0182]
τ
i,j
(n 1)为n 1时刻路径i到j的信息素;
[0183]
0<ρ≤1为信息素的蒸发率;
[0184]
τ
i,j
(n)为n时刻路径i到j的信息素;
[0185]
δτ
i,j
(n)为每只蚂蚁在路径i到j留下的信息素;
[0186]
为第k只蚂蚁在路径i到j留下的信息素
[0187]
⑨
判断是否满足终止条件k,若满足则结束蚁群算法寻优并绘制最优规划路径;
[0188]
若不满足则转到步骤
③
。
[0189]
通过蚁群算法找到从喷雾降温风扇当前定位到最佳位置的最优路径,即避开障碍物的最短路径,可以让喷雾降温风扇快速、精确的到达最终位置,以此节省电能。将蚁群算法得到的最优路径储存在信息存储模块中,生物实时机器学习系统对保存的最优路径规划记录不断进行学习,在之后喷雾降温风扇移动前最优路径的规划阶段可以进行快速检索,进一步减少路径规划的时间提高喷雾降温风扇移动的效率。
[0190]
更优地,信息处理系统的超声波避障模块用于在喷雾降温风扇移动过程中发射接收超声波信息,将接收到的各个方向的超声波信息实时地转化为距离信息实时地发送给优化检测模块,不断地优化调整喷雾降温风扇移动路线,以避免控制区域内人员受伤以及喷
雾降温风扇。通过计时器测量从声波发射到遇到障碍物将超声波反射回来的总用时的一半乘以超声波在空气中的传播速度,计算出喷雾降温风扇到障碍物的实际距离,超声波测距公式:
[0191]
l=ct
[0192]
其中,l-喷雾降温风扇到障碍物的实际距离;
[0193]
c-超声波在空气中的传播速度,一般取340m/s;
[0194]
t-从超声波发射到遇到障碍物将超声波反射回来的总用时的一半。
[0195]
超声波避障模块采用超声波测距换能器3,将超声波测距换能器3搭载在180
°
舵机4之上,舵机4实现水平方向180
°
转动超声波测距换能器3实时发射并接收超声波,以此检测180
°
内每个角度上障碍物与喷雾降温风扇的距离。
[0196]
末端控制系统包括末端控制器,末端控制器与喷雾降温风扇1、喷雾2、喷雾电池、显示器11、电量报警器6和水量报警器7连接,用于给以上设备输出指令。末端控制系统接收信息处理系统发出的信息,发出与信息相对应的指令给执行器,达到实时、精确控制喷雾降温风扇送风档位、喷雾水流量、电池的充放电、显示器11数据信息显示与报警系统发出报警警报,报警系统包括水箱水位报警模块和电量报警模块,用于警示水箱存水量不足与喷雾降温风扇电量不足。
[0197]
需要在喷雾降温风扇电机及喷雾水流总管上安装传感器,用于监控风扇实际风速与喷雾实际水流量,将实际值与设定值进行比较,给控制过程反馈信号以确保达到控制目标。如末端控制器向风扇风机接收到提高转速的指令后,风扇风机根据实际风速与设定风速的差值对风机转速进行调控。
[0198]
如图2所示,本发明所述的基于计算机视觉技术的室外热环境喷雾降温风扇控制系统的控制方法,包括以下步骤:
[0199]
s1、喷雾降温风扇存储划定控制区域的地图信息;
[0200]
s2、室外空气温度采集仪采集室外空气温度,室外空气湿度采集仪采集室外空气湿度,同时红外地面温度传感器14采集地面温度,将室外空气温度与室外空气温度阈值进行对比。若室外空气温度大于室外空气温度阈值,则进行下一步骤;
[0201]
s3、通过摄像头获取降温区域中人员视频信息,通过openpose算法检测控制区域内是否有人员活动并判断活动人员的热姿态。若控制区域内有人员出现热姿态,则进行步骤s4;
[0202]
s4、通过欧拉视频放大算法计算分析人员视频信息得到人员面部皮肤温度,同时通过红外温度传感器5采集人员面部皮肤温度;
[0203]
s5、将人员面部皮肤温度、室外空气温度、室外空气湿度与地面温度带入到人体热感觉计算公式中,计算出控制区域内所有人员的人体热感觉值;
[0204]
s6、将控制区域内所有人员的人体热感觉值带入到群体热感觉计算公式中计算得到控制区域内的群体热感觉值,对比群体热感觉值与群体热感觉阈值。若群体热感觉值小于群体热感觉阈值则不需要开启喷雾降温风扇1和喷雾2;若群体热感觉值大于群体热感觉阈值,则需要开启喷雾降温风扇1和/或喷雾2,则进行步骤s7;
[0205]
s7、通过yolov5算法结合超声波测距换能器3得到人员在控制区域地图中的二维定位坐标,通过gps得到喷雾降温风扇的初始定位。地图中人员数量最多的区域为目标区
域,用矩形框将目标区域内人员框在矩形边框上及边框内,选取矩形框外0.5米并距喷雾降温风扇初始定位最近的位置为喷雾降温风扇最佳位置;
[0206]
s8、通过蚁群算法得到移动式喷雾降温风扇从初始定位到喷雾降温风扇最佳位置的最优路线;
[0207]
s9、移动控制系统向左驱动轮9、右驱动轮10输出控制指令,使喷雾降温风扇按照最优路线移动至喷雾降温风扇最佳位置;
[0208]
s10、喷雾降温风扇向目标区域内人员发出语音询问信息,即是否开启风扇1和/或喷雾2;若需要开启风扇1和/或喷雾2,则末端控制器向喷雾降温风扇风机和/或喷雾水流量阀发出指令,使喷雾降温风扇和喷雾运行到群体热感觉值对应的档位与流量,储存室外空气温度、室外空气湿度、控制区域内群体热感觉值、人员定位信息与最优路线;
[0209]
s11若步骤s1室外空气温度不大于室外空气温度阈值、或步骤s2未捕捉到人员热姿态、或步骤s3群体热感觉值不大于群体热感觉阈值,但需要开启风扇1和/或喷雾2时,不比较地面温度与地面温度阈值;
[0210]
s12、若步骤s2室外空气温度不大于室外空气温度阈值、或步骤s3未捕捉到人员热姿态、或步骤s6群体热感觉值不大于群体热感觉阈值、或步骤s10不需要开启风扇1和/或喷雾2,则比较地面温度与地面温度阈值。若地面温度大于地面温度阈值,则需要进行以下步骤;
[0211]
s13、将控制区域地图划分为1*1m2个小方格每个小方格中心为红外地面温度传感器14测量点,通过红外地面温度传感器14测量控制区域内所有小方格中心点温度,得到所有室外地面温度超过室外地面温度阈值的小方格及其中心点。通过gps获取喷雾降温风扇此时的喷雾降温风扇定位信息,使用蚁群算法得到从喷雾降温风扇此时定位并经过需要降温的小方格中心点的最优路线;
[0212]
s14、移动控制系统启动向左驱动轮9、右驱动轮10,末端控制系统控制地面喷雾8开启,让喷雾降温风扇按照最优路移动并进行喷雾,使控制区域内地面温度维持在适宜范围内,起到保护地面和对环境间接降温、除尘的效果。
[0213]
如图3所示,末端控制原理框图,给定系统末端设备参数初始设定值,根据数据采集系统测得的群体热感觉值与智能语音交互系统接收到的人员语音信息在信息处理系统的优化检测模块进行优化得到末端设备的参数优化设定值,若系统需要调控末端设备,由末端控制器控制末端执行器执行指令,使受控末端设备的被控变量达到优化设定值,使控制区域内大多数人员达到较高的热舒适状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。