技术特征:
1.一种齿轮系统传动误差的概率分析方法,其方法具体步骤如下:步骤一:对影响齿轮传动误差的因素进行分类,提出了影响传输误差因素的三层耦合关系模型;第一层是可以测量的齿轮系统的最终传动误差;第二层是直接影响传输误差的因素,它们都属于几何变形,包括固有位置误差、装置误差和受力引起的变形误差;第三层是通过第二层因素间接影响传动误差的因素,包括温度、摩擦和载荷。步骤二:分析第三层因素对齿轮传动误差的影响,包括载荷对第二层因素的影响、温度对第二层因素的影响和摩擦力对第二层因素的影响;其中,载荷对第二层因素的影响包括载荷引起的轴的扭转变形、轴的弯曲变形、轴承间隙的变化和轮齿的变形;温度和摩擦力影响第二层中的所有因素。步骤三:分析第二层因素对齿轮传动误差的影响,包括固有位置误差、装置误差和受力引起的变形误差;其中,固有位置误差包括切向综合总偏差和一齿切向综合总偏差;切向综合总偏差反映了齿轮加工时几何偏心和运动偏心引起的大周期齿轮固有位置误差;一齿切向综合偏差是齿形误差和基节误差综合作用的结果;装置误差是几何偏心的传动误差;齿轮在受到转矩、径向力和圆周力的作用下,将会引起轴扭转变形、轴弯曲变形、轴承间隙变化以及轮齿变形。步骤四:提炼出一对外啮合齿轮副传动误差的综合表达式;外啮合齿轮副的传动误差包括分别由主动轮和从动轮引起的固有位置误差、装置误差、轴扭转变形误差、轴弯曲变形误差、轴承间隙改变引起的误差、轮齿变形误差。步骤五:提炼出一对内啮合齿轮副传动误差的综合表达式;内啮合齿轮副的传动误差包括分别由主动轮和从动轮引起的固有位置误差、装置误差、轴扭转变形误差、轴弯曲变形误差、轴承间隙改变引起的误差、轮齿变形误差。步骤六:建立外啮合齿轮副传动误差的概率公式;由于在进行产品设计时,设计人员只给出各零部件的公差,而一批零件的制造误差通常是在给定的范围内按一定的统计规律分布的,所以这里使用概率法来计算齿轮机构的传动误差。步骤七:建立内啮合齿轮副传动误差的概率公式;与步骤六原理一样,各误差因素符合一定的概率分布,综合考虑影响内啮合齿轮副的各单因素误差的均值和方差,得到内啮合齿轮副的传动误差概率公式。步骤八:建立整个行星轮系总传动误差的概率公式。步骤六和步骤七得到了各单因素对最终传动误差影响的概率总公式,只要将相关数据代入就可以求出整个行星轮系的传动误差。2.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤四中,一对外啮合齿轮副传动误差的综合表达式为:
△
=e1
△1
△
s
t1
△
f1
△
s
b1
△
s
f1
e2
△2
△
s
t2
△
f2
△
s
b2
△
s
f2
ꢀꢀꢀꢀꢀꢀ
(1)其中:其中:上述表达式中的参数e1、e2分别为主动轮和从动轮的固有位置误差引起的分度圆上的线值误差;f
′
i1
、f
′
i2
分别为主动轮和从动轮的切向综合总偏差;f
′
i1
、f
′
i2
分别为主动轮和从
动轮的一齿切向综合偏差;e1、e2分别为主动轮和从动轮安装时的几何偏心;
△
f1
、
△
f2
分别为主动轮和从动轮的轴弯曲变形引起的分度圆上的线值误差;e1、e2分别为主动轮和从动轮装配时的几何偏心;
△
r1
、
△
r2
分别为圆周侧隙;
△
f1、
△
f2分别为主动轮和从动轮的轮齿变形;
△
s
f1
、
△
s
f2
分别为主动轮和从动轮的轮齿变形引起的分度圆上的线值误差。3.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤五中,一对内啮合齿轮副传动误差的综合表达式为:
△
=e1
△
s
t1
△
f1
△
s
b1
△
s
f1
e2‑△
s
t2
△
f2
△
s
b2
△
s
f2
△
l
ꢀꢀꢀꢀꢀ
(2)其中,
△
l是内啮合齿轮副的主动轮和从动轮安装产生的几何偏心引起的在分度圆上度量的线值误差。4.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤六和步骤七中,用概率法计算传动误差,首先进行如下假设:1)齿轮误差及其他误差都是连续型随机变量。2)各项误差的分布都是相互独立的。5.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤六和步骤七中,将各项误差因素的概率分布形式进行汇总;总传动误差为随机分布;切向综合总偏差f
i
'为瑞利分布;一齿切向综合总偏差f
′
i
为瑞利分布;几何偏心引起装置误差
△
为正态分布;齿轮扭转变形
△
s
t
为常值;轴弯曲变形
△
s
f
为常值;轴承间隙变化量
△
r
为常值;轮齿变形
△
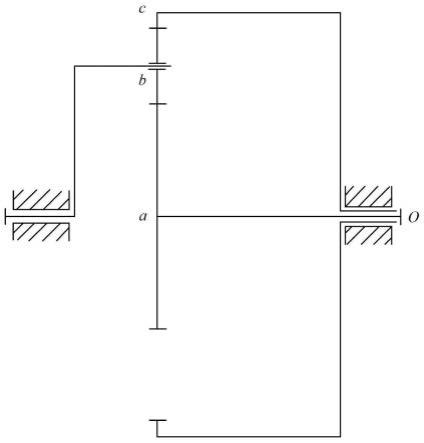
f为常值;相位角为均匀分布。6.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤六中,外啮合齿轮副的均值和方差为:外啮合齿轮副的均值和方差为:7.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤六中,内啮合齿轮副的均值和方差为:内啮合齿轮副的均值和方差为:8.如权利要求1所述的一种齿轮系统传动误差的概率分析方法,其特征在于步骤八中,行星轮系总传动误差的均值和方差为:动误差的均值和方差为:其中:
表达式(4)和(5)中的参数i
13
表示输入太阳轮a和输出齿轮b之间的传动比;i
23
表示行星轮c和输出齿轮b之间的传动比;
α
t
c
为行星轮系总传动误差;
α
t
δac
为太阳轮a和行星齿轮c之间的传动误差;
α
t
δcb
为行星齿轮c4和输出齿轮b4之间的传动误差。
技术总结
本发明公开了一种齿轮系统传动误差的概率分析方法,该方法主要包括:对影响齿轮传动误差的因素进行分类,本分类方法中共分了三层,最底层为总的传动误差,将直接影响齿轮传动误差的因素划分为第二层,对间接影响齿轮传动误差的因素划分为第三层;分析出各单因素误差对传动误差的影响;分别得到外啮合齿轮副传动误差公式和内啮合传动误差公式;最后根据各误差因素的概率分布形式,得到整个轮系的传动误差概率公式。误差概率公式。误差概率公式。
技术研发人员:高志慧 刘鹏 樊丰晨 边宇枢
受保护的技术使用者:北京航空航天大学
技术研发日:2022.04.12
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。