1.本发明涉及电网建设数字化管理技术,具体涉及一种基于数字孪生技术的电网基建过程管控方法、系统及介质。
背景技术:
2.我国电力行业取得了翻天覆地的变化,建成了全世界电压等级最高、网架结构最复杂,供电可靠性最高的坚强智能电网,为国内经济民生的稳定发展提供了安全充足的电力保障。快速高效地构建以新能源为主体的新型电力系统,离不开无数的电网建设工程的开工实施。目前对于电网基建现场的过程管控主要还是通过人力现场巡查和摄像头远程监视的方式来实现,极度依赖人力工作,因此带来了人工劳动强度大、人为疏忽漏洞、问题发现不及时等隐患。借助数字孪生技术,结合电网时空算法与视频三维特征点提取方法,实现基建现场过程实时管控,自动识别存在隐患,智能判断并提出预警信息,降低人工现场核查进度的劳动强度和安全风险,确保电网基建现场能按计划施工。
技术实现要素:
3.本发明要解决的技术问题:针对现有技术的上述问题,提供一种基于数字孪生技术的电网基建过程管控方法、系统及介质,本发明具有工程上切实可行、成本较低、准确可靠的优点,能为电网基建过程进度进行管控,提供及时准确的预警提示信息,降低人工现场核查进度的劳动强度和安全风险,确保电网基建现场能按计划施工。
4.为了解决上述技术问题,本发明采用的技术方案为:
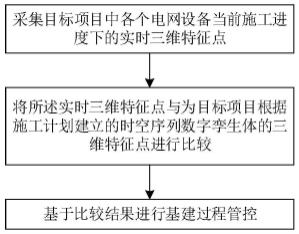
5.一种基于数字孪生技术的电网基建过程管控方法,包括:
6.1)采集目标项目中各个设备建筑当前施工进度下的实时三维特征点;
7.2)将所述实时三维特征点与为目标项目根据施工计划建立的时空序列数字孪生体的三维特征点进行比较以进行基建过程管控。
8.可选地,所述为目标项目根据施工计划建立的时空序列数字孪生体的形式为(d
s1
,d
s2
,
…
,d
sj
,
…
,d
sm
),其中d
s1
~d
sm
分别表示时间点1~m的单元级数字孪生体,d
sj
表示任意时间点j的单元级数字孪生体,m为施工计划中从工程开始到工程结束之间的时间点总数量。
9.可选地,步骤2)中的基建过程管控包括确定目标项目的当前施工进度是超前还是滞后,以及目标项目是否按图纸施工。
10.可选地,步骤2)包括:
11.2.1)确定当前施工进度对应的时间点j,将所述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中同为时间点j的单元级数字孪生体d
sj
的三维特征点进行比较,两者一致则判定当前施工进度正常,结束并退出;否则跳转下一步;
12.2.2)依次将所述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中时间点j后的单元级数字孪生体d
sj 1
~d
sm
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度超前,结束并退出;依次将所
述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中时间点j前的单元级数字孪生体d1~d
sj-1
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度滞后,结束并退出;否则跳转下一步;
13.2.3)判定无法找到三维特征点一致的单元级数字孪生体,当前施工进度未按图纸施工。
14.可选地,步骤1)中采集目标项目中各个设备建筑当前施工进度下的实时三维特征点具体是指从现场采集得到的视频中提取目标项目中各个设备建筑当前施工进度下的实时三维特征点。
15.可选地,所述提取目标项目中各个设备建筑当前施工进度下的实时三维特征点包括:将从现场采集得到的视频中的图像帧采用预设的图像识别模型识别出目标项目中各个设备建筑的特征点,并将特征点的平面坐标根据现场采集视频的设备的坐标转换参数转换为三维坐标,从而得到目标项目中各个设备建筑当前施工进度下的实时三维特征点。
16.可选地,所述现场采集视频的设备为布控球或无人机。
17.可选地,步骤2)之前还包括建立时空序列数字孪生体的步骤:
18.s1)分别构建目标项目中第1~n个设备建筑的三维模型;
19.s2)针对第1~n个设备建筑,分别根据任意第i个设备建筑的三维模型及属性信息,生成第i个设备建筑的设备级数字孪生体d
di
;
20.s3)结合空间地理信息、设备建筑间的连接关系,将n个设备建筑的设备级数字孪生体d
d1
~d
dn
组合目标项目对应的形成单元级数字孪生体ds;
21.s4)根据施工计划,基于单元级数字孪生体ds生成从工程开始到工程结束之间的任意时间点j的单元级数字孪生体d
sj
,从而目标项目的时空序列数字孪生体(d
s1
,d
s2
,
…
,d
sj
,
…
,d
sm
),其中d
sm
表示时间点m的单元级数字孪生体,m为施工计划中从工程开始到工程结束之间的时间点总数量。
22.此外,本发明还提供一种基于数字孪生技术的电网基建过程管控系统,包括相互连接的微处理器和存储器,该微处理器中存储有被编程或配置以执行所述基于数字孪生技术的电网基建过程管控方法的步骤。
23.此外,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,该计算机程序用于被微处理器执行以实施所述基于数字孪生技术的电网基建过程管控方法的步骤。
24.和现有技术相比,本发明主要具有下述优点:
25.1、本发明通过数字孪生技术,实现基建现场过程实时管控,自动识别存在隐患,相比传统靠人工监视的过程管控模式,可以大幅降低人工劳动强度和安全风险。
26.2、本发明将实时三维特征点与为目标项目根据施工计划建立的时空序列数字孪生体中的数字孪生体的三维特征点进行比较以进行基建过程管控,可提供及时准确的预警提示信息,可大幅提升隐患问题发现的准确性和及时性,确保电网基建现场能按计划施工。
附图说明
27.图1为本发明实例方法的基本流程示意图。
28.图2为本发明实施例方法的完整流程示意图。
具体实施方式
29.下文将以目标项目为220kv变电站的基建工程施工过程为例,对本发明基于数字孪生技术的电网基建过程管控方法、系统及介质进行进一步的详细说明。
30.如图1所示,本实施例基于数字孪生技术的电网基建过程管控方法包括:
31.1)采集目标项目中各个设备建筑当前施工进度下的实时三维特征点;
32.本实施例中,目标项目的设备建筑包括电气设备及建筑,如220kv主变、 220kv gis设备、110kv gis设备、无功补偿设备、开关室、二次室等。
33.2)将所述实时三维特征点与为目标项目根据施工计划建立的时空序列数字孪生体中的数字孪生体的三维特征点进行比较以进行基建过程管控。
34.本实施例中,为目标项目根据施工计划建立的时空序列数字孪生体的形式为(d
s1
,d
s2
,
…
,d
sj
,
…
,d
sm
),其中d
s1
~d
sm
分别表示时间点1~m的单元级数字孪生体,d
sj
表示任意时间点j的单元级数字孪生体,m为施工计划中从工程开始到工程结束之间的时间点总数量。
35.本实施例步骤2)中的基建过程管控包括确定目标项目的当前施工进度是超前还是滞后,以及目标项目是否按图纸施工。
36.参见图2,本实施例中步骤2)包括:
37.2.1)确定当前施工进度对应的时间点j,将所述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中同为时间点j的单元级数字孪生体d
sj
的三维特征点进行比较,两者一致则判定当前施工进度正常,结束并退出;否则跳转下一步;
38.2.2)依次将所述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中时间点j后的单元级数字孪生体d
sj 1
~d
sm
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度超前(根据匹配的单元级数字孪生体的时间点可确定超前的进度),结束并退出;依次将所述实时三维特征点与所述为目标项目根据施工计划建立的时空序列数字孪生体中时间点j前的单元级数字孪生体d1~d
sj-1
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度滞后(根据匹配的单元级数字孪生体的时间点可确定滞后的进度),结束并退出;否则跳转下一步;
39.2.3)判定无法找到三维特征点一致的单元级数字孪生体,当前施工进度未按图纸施工。
40.本实施例中,步骤1)中采集目标项目中各个设备建筑当前施工进度下的实时三维特征点具体是指从现场采集得到的视频中提取目标项目中各个设备建筑当前施工进度下的实时三维特征点。
41.本实施例中,提取目标项目中各个设备建筑当前施工进度下的实时三维特征点包括:将从现场采集得到的视频中的图像帧采用预设的图像识别模型识别出目标项目中各个设备建筑的特征点,并将特征点的平面坐标根据现场采集视频的设备的坐标转换参数转换为三维坐标,从而得到目标项目中各个设备建筑当前施工进度下的实时三维特征点。需要说明的是:其一、图像识别模型来进行图像为现有公知方法,例如本实施例中采用了角点检测(corner detection)方法以快速提取目标项目中各个设备建筑的特征点,此外也可以根据需要采用机器学习模型(例如深度卷积神经网络)来提取目标项目中各个设备建筑的特征点。其二、将特征点的平面坐标根据现场采集视频的设备的坐标转换参数转换为三维坐
标也是基于相机进行空间定位的公知方法。本技术仅涉及对上述公知方法的基本应用,故在此不再详述。其中,现场采集视频的设备可根据需要采用布控球(摄像头)或无人机。
42.参见图2,本实施例中步骤2)之前还包括建立时空序列数字孪生体的步骤:
43.s1)分别构建目标项目中第1~n个设备建筑的三维模型;
44.本实施例中,目标项目的设备建筑包括电气设备及建筑,如220kv主变、 220kv gis设备、110kv gis设备、无功补偿设备、开关室、二次室等,根据设计图纸,逐一构建三维模型,同时外形精度需符合要求。
45.s2)针对第1~n个设备建筑,分别根据任意第i个设备建筑的三维模型及属性信息,生成第i个设备建筑的设备级数字孪生体d
di
;
46.s3)结合空间地理信息、设备建筑间的连接关系,将n个设备建筑的设备级数字孪生体d
d1
~d
dn
组合目标项目对应的形成单元级数字孪生体ds;
47.s4)根据施工计划,基于单元级数字孪生体ds生成从工程开始到工程结束之间的任意时间点j的单元级数字孪生体d
sj
,从而目标项目的时空序列数字孪生体(d
s1
,d
s2
,
…
,d
sj
,
…
,d
sm
),其中d
sm
表示时间点m的单元级数字孪生体,m为施工计划中从工程开始到工程结束之间的时间点总数量。需要说明的是,基于单元级数字孪生体ds生成从工程开始到工程结束之间的任意时间点j的单元级数字孪生体d
sj
为现有数字孪生技术的基本应用,其本质上是生成不同施工进度下的设备建筑的三维模型,本实施例中仅仅是对现有数字孪生技术的基本应用,不涉及对现有数字孪生技术本身的改进,因此其具体实现在此不再详述。
48.施工计划中从工程开始到工程结束之间的时间点总数量m可根据需要进行指定,例如本实施例中以天作为时间点,使得步骤2)中的基建过程管控包括确定目标项目的当前施工进度是超前还是滞后时可实现天的粒度。本实施例中,施工计划中从工程开始日期为2022年1月1日,工程结束日期预计为2022年6 月30日,因此将时空序列数字孪生体的序号修改为时间点,可表示为:
49.d
s20220101
,d
s20220102
,
…
,d
s20220630
;
50.其中d
s20220101
即为2022年1月1日对应的单元级数字孪生体d
s1
,d
s20220102
即为2022年1月2日对应的单元级数字孪生体d
s2
,依次类推,d
s20220630
即为 2022年6月30日对应的单元级数字孪生体d
sm
。以2022年3月1日作为当前施工进度对应的时间点示例,步骤1)采集目标项目中各个设备建筑当前施工进度下的实时三维特征点记为b
s20220301
,本实施例中的步骤2)包括:
51.步骤1:确定当前施工进度对应的时间点j为2022年3月1日,将实时三维特征点b
s20220301
与为目标项目根据施工计划建立的时空序列数字孪生体中同为2022年3月1日的单元级数字孪生体d
s20220301
的三维特征点进行比较,两者一致则判定当前施工进度正常,提示“施工安装进度正常”,结束并退出;否则跳转下一步;
52.步骤2:依次将实时三维特征点b
s20220301
与2022年3月1日后的单元级数字孪生体d
s20220302
,d
s20220303
,
…
,d
s20220630
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度超前,提示“施工安装进度超前”,结束并退出;依次将实时三维特征点b
s20220301
与2022年3月1日前的单元级数字孪生体d
s20220101
,d
s20220102
,
…
,d
s20220228
的三维特征点进行比较,如果找到三维特征点一致的单元级数字孪生体,则判定当前施工进度滞后,提示“施工安装进度滞后”,结束并退出;否则跳转下一步;
53.步骤3:判定无法找到三维特征点一致的单元级数字孪生体,当前施工进度未按图纸施工,提示“未按图纸施工安装”。
54.综上所述,本实施例方法包括采集目标项目中各个设备建筑当前施工进度下的实时三维特征点;将所述实时三维特征点与为目标项目根据施工计划建立的时空序列数字孪生体中的数字孪生体的三维特征点进行比较以进行基建过程管控,具有工程上切实可行、成本较低、准确可靠的优点,能为电网基建过程进度进行管控,提供及时准确的预警提示信息,降低人工现场核查进度的劳动强度和安全风险,确保电网基建现场能按计划施工。
55.此外,本实施例还提供一种基于数字孪生技术的电网基建过程管控系统,包括相互连接的微处理器和存储器,该微处理器中存储有被编程或配置以执行前述基于数字孪生技术的电网基建过程管控方法的步骤。
56.此外,本实施例还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,该计算机程序用于被微处理器执行以实施前述基于数字孪生技术的电网基建过程管控方法的步骤。
57.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、 cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
58.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。