1.本发明涉及光学成像设备技术领域,具体而言,涉及一种成像系统。
背景技术:
2.随着手机、平板等电子产品的发展,镜头呈现向大像面、大广角、大孔径、超薄化的发展趋势。而对于部分电子产品也趋向于把像面做大,同时还要兼顾镜头的成本。而大像面意味着更高的分辨率,低成本高性能的手机镜头无疑对于光学系统设计提出了更高的难度挑战,但也极大地提高了手机镜头的成像能力和竞争优势,传统的五片式镜头的结构已不足以有效应对这些挑战,七片式的成像系统成本会明显增加,六片式的成像系统将会逐渐成为主流。
3.也就是说,现有技术中成像系统存在低成本与高像质不能兼顾的问题。
技术实现要素:
4.本发明的主要目的在于提供一种成像系统,以解决现有技术中成像系统存在低成本与高像质不能兼顾的问题。
5.为了实现上述目的,根据本发明的一个方面,提供了一种成像系统,沿成像系统的入光侧至成像系统的出光侧顺次包括:光阑;具有屈折力的第一透镜,第一透镜靠近入光侧的表面为凸形状;具有屈折力的第二透镜,第二透镜靠近入光侧的表面为凸形状;具有屈折力的第三透镜;具有屈折力的第四透镜,第四透镜靠近入光侧的表面为凸形状;具有正屈折力的第五透镜;具有屈折力的第六透镜,第六透镜靠近入光侧的表面为凹形状;其中,第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离sag51、第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag52之间满足:-4.5<(sag51 sag52)/(sag51-sag52)<-2.0。
6.进一步地,成像系统的最大视场角fov满足:fov》80
°
。
7.进一步地,成像系统的有效焦距f与成像系统的入瞳直径epd之间满足:f/epd≤1.9。
8.进一步地,第一透镜靠近入光侧的表面至成像系统的成像面的轴上距离ttl与成像面上有效像素区域对角线长的一半imgh之间满足:ttl/imgh<1.2。
9.进一步地,第一透镜的有效焦距f1与第一透镜靠近入光侧的表面的曲率半径r1之间满足:2.0<f1/r1<2.5。
10.进一步地,第一透镜的有效焦距f1与第一透镜靠近出光侧的表面的曲率半径r2之间满足:1.5<r2/f1<2.0。
11.进一步地,第二透镜的有效焦距f2与第二透镜靠近出光侧的表面的曲率半径r4之间满足:-3.5<f2/r4<-2.0。
12.进一步地,第四透镜靠近入光侧的表面的曲率半径r7与第四透镜靠近出光侧的表
面的曲率半径r8之间满足:1.0≤r7/r8<1.6。
13.进一步地,第五透镜的有效焦距f5与第五透镜靠近出光侧的表面的曲率半径r10之间满足:-2.0<f5/r10<-1.0。
14.进一步地,第六透镜靠近入光侧的表面的曲率半径r11与第六透镜靠近出光侧的表面的曲率半径r12之间满足:-3.5<r11/r12<-3.0。
15.进一步地,第一透镜在光轴上的中心厚度ct1与第一透镜的边缘厚度et1之间满足:2.5<ct1/et1<3.0。
16.进一步地,第五透镜在光轴上的中心厚度ct5与第五透镜的边缘厚度et5之间满足:2.0<ct5/et5<3.0。
17.进一步地,第一透镜和第二透镜在光轴上的空气间隔t12、第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag12之间满足:1.0<t12/sag12<2.0。
18.进一步地,第二透镜和第三透镜在光轴上的空气间隔t23、第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag22之间满足:1.5<t23/sag22<2.6。
19.进一步地,第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag62、第五透镜和第六透镜在光轴上的空气间隔t56之间满足:-2.0<sag62/t56<-1.0。
20.进一步地,第二透镜的阿贝数v2与第三透镜的阿贝数v3之间满足:v3-v2<20。
21.进一步地,第三透镜的阿贝数v3与第四透镜的阿贝数v4之间满足:v3-v4<15。
22.根据本发明的另一方面,提供了一种成像系统,沿成像系统的入光侧至成像系统的出光侧顺次包括:光阑;具有屈折力的第一透镜,第一透镜靠近入光侧的表面为凸形状;具有屈折力的第二透镜,第二透镜靠近入光侧的表面为凸形状;具有屈折力的第三透镜;具有屈折力的第四透镜,第四透镜靠近入光侧的表面为凸形状;具有正屈折力的第五透镜;具有屈折力的第六透镜,第六透镜靠近入光侧的表面为凹形状;其中,第一透镜和第二透镜在光轴上的空气间隔t12、第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag12之间满足:1.0<t12/sag12<2.0。
23.进一步地,成像系统的最大视场角fov满足:fov》80
°
。
24.进一步地,成像系统的有效焦距f与成像系统的入瞳直径epd之间满足:f/epd≤1.9。
25.进一步地,第一透镜靠近入光侧的表面至成像系统的成像面的轴上距离ttl与成像面上有效像素区域对角线长的一半imgh之间满足:ttl/imgh<1.2。
26.进一步地,第一透镜的有效焦距f1与第一透镜靠近入光侧的表面的曲率半径r1之间满足:2.0<f1/r1<2.5。
27.进一步地,第一透镜的有效焦距f1与第一透镜靠近出光侧的表面的曲率半径r2之间满足:1.5<r2/f1<2.0。
28.进一步地,第二透镜的有效焦距f2与第二透镜靠近出光侧的表面的曲率半径r4之间满足:-3.5<f2/r4<-2.0。
29.进一步地,第四透镜靠近入光侧的表面的曲率半径r7与第四透镜靠近出光侧的表
面的曲率半径r8之间满足:1.0≤r7/r8<1.6。
30.进一步地,第五透镜的有效焦距f5与第五透镜靠近出光侧的表面的曲率半径r10之间满足:-2.0<f5/r10<-1.0。
31.进一步地,第六透镜靠近入光侧的表面的曲率半径r11与第六透镜靠近出光侧的表面的曲率半径r12之间满足:-3.5<r11/r12<-3.0。
32.进一步地,第一透镜在光轴上的中心厚度ct1与第一透镜的边缘厚度et1之间满足:2.5<ct1/et1<3.0。
33.进一步地,第五透镜在光轴上的中心厚度ct5与第五透镜的边缘厚度et5之间满足:2.0<ct5/et5<3.0。
34.进一步地,第二透镜和第三透镜在光轴上的空气间隔t23、第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag22之间满足:1.5<t23/sag22<2.6。
35.进一步地,第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag62、第五透镜和第六透镜在光轴上的空气间隔t56之间满足:-2.0<sag62/t56<-1.0。
36.进一步地,第二透镜的阿贝数v2与第三透镜的阿贝数v3之间满足:v3-v2<20。
37.进一步地,第三透镜的阿贝数v3与第四透镜的阿贝数v4之间满足:v3-v4<15。
38.应用本发明的技术方案,沿成像系统的入光侧至成像系统的出光侧顺次包括光阑、具有屈折力的第一透镜、具有屈折力的第二透镜、具有屈折力的第三透镜、具有屈折力的第四透镜、具有正屈折力的第五透镜和具有屈折力的第六透镜,第一透镜靠近入光侧的表面为凸形状;第二透镜靠近入光侧的表面为凸形状;第四透镜靠近入光侧的表面为凸形状;第六透镜靠近入光侧的表面为凹形状;其中,第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离sag51、第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag52之间满足:-4.5<(sag51 sag52)/(sag51-sag52)<-2.0。
39.通过合理的控制成像系统的各个透镜的屈折力的正负的分配,可有效的平衡成像系统的低阶像差,同时能降低成像系统的公差的敏感性,保持成像系统的小型化的同时保证成像系统的成像质量。合理控制第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离以及第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离,能合理控制主光线偏转角度,提高与芯片的匹配程度,有利于调整光学透镜组的结构。本技术中的成像系统具有六片透镜大大增加了成像系统的成像质量,同时不会过渡增加成像系统的成本,具有低成本与高像质的优点。
附图说明
40.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
41.图1示出了本发明的例子一的成像系统的结构示意图;
42.图2至图5分别示出了图1中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及
倍率色差曲线;
43.图6示出了本发明的例子二的成像系统的结构示意图;
44.图7至图10分别示出了图6中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
45.图11示出了本发明的例子三的成像系统的结构示意图;
46.图12至图15分别示出了图11中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
47.图16示出了本发明的例子四的成像系统的结构示意图;
48.图17至图20分别示出了图16中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
49.图21示出了本发明的例子五的成像系统的结构示意图;
50.图22至图25分别示出了图21中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线。
51.其中,上述附图包括以下附图标记:
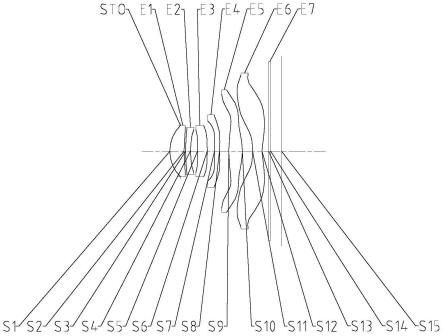
52.sto、光阑;e1、第一透镜;s1、第一透镜靠近入光侧的表面;s2、第一透镜靠近出光侧的表面;e2、第二透镜;s3、第二透镜靠近入光侧的表面;s4、第二透镜靠近出光侧的表面;e3、第三透镜;s5、第三透镜靠近入光侧的表面;s6、第三透镜靠近出光侧的表面;e4、第四透镜;s7、第四透镜靠近入光侧的表面;s8、第四透镜靠近出光侧的表面;e5、第五透镜;s9、第五透镜靠近入光侧的表面;s10、第五透镜靠近出光侧的表面;e6、第六透镜;s11、第六透镜靠近入光侧的表面;s12、第六透镜靠近出光侧的表面;e7、滤波片;s13、滤波片的入光侧面;s14、滤波片的出光侧面;s15、成像面。
具体实施方式
53.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
54.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
55.在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
56.应注意,在本说明书中,第一、第二、第三等的表述仅用于将一个特征与另一个特征区分开来,而不表示对特征的任何限制。因此,在不背离本技术的教导的情况下,下文中讨论的第一透镜也可被称作第二透镜或第三透镜。
57.在附图中,为了便于说明,已稍微夸大了透镜的厚度、尺寸和形状。具体来讲,附图中所示出的球面或非球面的形状通过实例的方式示出。即,球面或非球面的形状不限于附图中示出的球面或非球面的形状。附图仅为示例而并非严格按比例绘制。
58.在本文中,近轴区域是指光轴附近的区域。若透镜表面为凸形状且未界定该凸形状位置时,则表示该透镜表面至少于近轴区域为凸形状;若透镜表面为凹形状且未界定该
凹形状位置时,则表示该透镜表面至少于近轴区域为凹形状。每个透镜靠近物侧的表面成为该透镜靠近入光侧的表面,每个透镜靠近像侧的表面称为该透镜靠近出光侧的表面。在近轴区域的面形的判断可依据该领域中通常知识者的判断方式,以r值,(r指近轴区域的曲率半径,通常指光学软件中的透镜数据库(lens data)上的r值)正负判断凹凸。以物侧面来说,当r值为正时,判定为凸形状,当r值为负时,判定为凹形状;以像侧面来说,当r值为正时,判定为凹形状,当r值为负时,判定为凸形状。
59.为了解决现有技术中成像系统存在低成本与高像质不能兼顾的问题,本发明提供了一种成像系统。
60.如图1至图25所示,沿成像系统的入光侧至成像系统的出光侧顺次包括光阑、具有屈折力的第一透镜、具有屈折力的第二透镜、具有屈折力的第三透镜、具有屈折力的第四透镜、具有正屈折力的第五透镜和具有屈折力的第六透镜,第一透镜靠近入光侧的表面为凸形状;第二透镜靠近入光侧的表面为凸形状;第四透镜靠近入光侧的表面为凸形状;第六透镜靠近入光侧的表面为凹形状;其中,第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离sag51、第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag52之间满足:-4.5<(sag51 sag52)/(sag51-sag52)<-2.0。
61.通过合理的控制成像系统的各个透镜的屈折力的正负的分配,可有效的平衡成像系统的低阶像差,同时能降低成像系统的公差的敏感性,保持成像系统的小型化的同时保证成像系统的成像质量。合理控制第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离以及第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离,能合理控制主光线偏转角度,提高与芯片的匹配程度,有利于调整光学透镜组的结构。本技术中的成像系统具有六片透镜大大增加了成像系统的成像质量,同时不会过渡增加成像系统的成本,具有低成本与高像质的优点。
62.优选地,第五透镜靠近入光侧的表面和光轴的交点至第五透镜靠近入光侧的表面的有效半径顶点之间的轴上距离sag51、第五透镜靠近出光侧的表面和光轴的交点至第五透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag52之间满足:-4.3<(sag51 sag52)/(sag51-sag52)<-2.1。
63.在本实施例中,成像系统的最大视场角fov满足:fov》80
°
。本技术中的视场角大,具有较为宽阔的拍摄视场,以使得成像系统对大范围的拍摄都能够清晰成像,具有大像面的优点。优选地,fov》87
°
。
64.在本实施例中,成像系统的有效焦距f与成像系统的入瞳直径epd之间满足:f/epd≤1.9。合理控制成像系统的有效焦距和入瞳直径,使得成像系统获得较大的通光口径。通光口径扩大可以提高采光,从而能够在比较暗的情况下降低噪点,提高成像质量。优选地,1.8《f/epd≤1.9。
65.在本实施例中,第一透镜靠近入光侧的表面至成像系统的成像面的轴上距离ttl与成像面上有效像素区域对角线长的一半imgh之间满足:ttl/imgh<1.2。合理设置第一透镜靠近入光侧的表面至成像面的轴上距离和成像面上有效像素区域对角线长的一半之间的比值,确保成像系统具有轻薄的特点,有利于成像系统的小型化。优选地,1.1<ttl/imgh
<1.2。
66.在本实施例中,第一透镜的有效焦距f1与第一透镜靠近入光侧的表面的曲率半径r1之间满足:2.0<f1/r1<2.5。合理设置第一透镜的有效焦距与第一透镜靠近入光侧的表面的曲率半径的比值,有助于保证成像系统性能的同时降低第一透镜的加工敏感性。优选地,2.2<f1/r1<2.4。
67.在本实施例中,第一透镜的有效焦距f1与第一透镜靠近出光侧的表面的曲率半径r2之间满足:1.5<r2/f1<2.0。通过将r2/f1限制在合理的范围内,有利于第一透镜的有效焦距的合理设置,有助于增大成像系统的整体焦距,进而使成像系统具有大像面。优选地,1.55<r2/f1<1.8。
68.在本实施例中,第二透镜的有效焦距f2与第二透镜靠近出光侧的表面的曲率半径r4之间满足:-3.5<f2/r4<-2.0。通过将f2/r4限制在合理的范围内,使得第二透镜的有效焦距合理设置,有助于调整光线位置,缩短成像系统的总长,有利于成像系统的小型化。优选地,-3.3<f2/r4<-2.3。
69.在本实施例中,第四透镜靠近入光侧的表面的曲率半径r7与第四透镜靠近出光侧的表面的曲率半径r8之间满足:1.0≤r7/r8<1.6。通过将r7/r8限制在合理的范围内,有利于控制轴外视场光线在成像面的入射角度,增加与感光元件和带通滤光片的匹配性。优选地,1.0≤r7/r8<1.55。
70.在本实施例中,第五透镜的有效焦距f5与第五透镜靠近出光侧的表面的曲率半径r10之间满足:-2.0<f5/r10<-1.0。通过约束第五透镜的有效焦距和第五透镜靠近出光侧的表面的曲率半径的比值在一定范围,有利于成像系统具有良好的成像质量。优选地,-1.9<f5/r10<-1.1。
71.在本实施例中,第六透镜靠近入光侧的表面的曲率半径r11与第六透镜靠近出光侧的表面的曲率半径r12之间满足:-3.5<r11/r12<-3.0。通过约束第六透镜靠近入光侧的表面的曲率半径和第六透镜靠近出光侧的表面的曲率半径的比值在一定范围,使得轴上视场和轴外视场的彗差较小,使成像系统具有良好的成像质量。优选地,-3.45<r11/r12<-3.1。
72.在本实施例中,第一透镜在光轴上的中心厚度ct1与第一透镜的边缘厚度et1之间满足:2.5<ct1/et1<3.0。合理分配第一透镜在光轴上的中心厚度以及第一透镜的边缘厚度之间的比值,有利于提升成像系统的透镜装配稳定性,增加成像系统工作的稳定性。优选地,2.8<ct1/et1<3.0。
73.在本实施例中,第五透镜在光轴上的中心厚度ct5与第五透镜的边缘厚度et5之间满足:2.0<ct5/et5<3.0。合理分配第五透镜在光轴上的中心厚度以及第五透镜的边缘厚度之间的比值,有利于降低成像系统的敏感度,有利于实现成像系统大光圈和高解像力特性。优选地,2.2<ct5/et5<2.9。
74.在本实施例中,第一透镜和第二透镜在光轴上的空气间隔t12、第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag12之间满足:1.0<t12/sag12<2.0。合理控制第一透镜和第二透镜在光轴上的空气间隔和第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离比值,能够控制内视场在第二透镜入射角的大小,有利于控制内视场
的像差,进而保证成像系统的成像质量。优选地,1.2<t12/sag12<1.8。
75.在本实施例中,第二透镜和第三透镜在光轴上的空气间隔t23、第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag22之间满足:1.5<t23/sag22<2.6。通过约束第二透镜和第三透镜在光轴上的空气间隔与第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离的比值在合理的范围内,可以有效的控制成像系统中间透镜对像差的贡献程度,减小成像系统的像差,提高成像质量。优选地,1.8<t23/sag22<2.6。
76.在本实施例中,第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag62、第五透镜和第六透镜在光轴上的空气间隔t56之间满足:-2.0<sag62/t56<-1.0。通过第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离与第五透镜和第六透镜在光轴上的空气间隔的比值在一定范围,使得轴上视场和轴外视场的彗差较小,使成像系统具有良好的成像质量。优选地,-1.8<sag62/t56<-1.1。
77.在本实施例中,第二透镜的阿贝数v2与第三透镜的阿贝数v3之间满足:v3-v2<20。通过约束第二透镜的阿贝数与第三透镜的阿贝数之差在一定范围,有利于改善系统色差,保证成像系统的成像质量。
78.在本实施例中,第三透镜的阿贝数v3与第四透镜的阿贝数v4之间满足:v3-v4<15。通过约束第三透镜的阿贝数与第四透镜的阿贝数之差在一定范围,可以控制成像系统材料搭配,有利于降低成本。
79.实施例二
80.如图1至图25所示,沿成像系统的入光侧至成像系统的出光侧顺次包括:光阑、具有屈折力的第一透镜、具有屈折力的第二透镜、具有屈折力的第三透镜、具有屈折力的第四透镜、具有正屈折力的第五透镜和具有屈折力的第六透镜,第一透镜靠近入光侧的表面为凸形状;第二透镜靠近入光侧的表面为凸形状;第四透镜靠近入光侧的表面为凸形状;第六透镜靠近入光侧的表面为凹形状;其中,第一透镜和第二透镜在光轴上的空气间隔t12、第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag12之间满足:1.0<t12/sag12<2.0。
81.通过合理的控制成像系统的各个透镜的屈折力的正负的分配,可有效的平衡成像系统的低阶像差,同时能降低成像系统的公差的敏感性,保持成像系统的小型化的同时保证成像系统的成像质量。合理控制第一透镜和第二透镜在光轴上的空气间隔和第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离比值,能够控制内视场在第二透镜入射角的大小,有利于控制内视场的像差,进而保证成像系统的成像质量。
82.优选地,第一透镜和第二透镜在光轴上的空气间隔t12、第一透镜靠近出光侧的表面和光轴的交点至第一透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag12之间满足:1.2<t12/sag12<1.8。
83.在本实施例中,成像系统的最大视场角fov满足:fov》80
°
。本技术中的视场角大,具有较为宽阔的拍摄视场,以使得成像系统对大范围的拍摄都能够清晰成像,具有大像面的优点。优选地,fov》87
°
。
84.在本实施例中,成像系统的有效焦距f与成像系统的入瞳直径epd之间满足:f/epd≤1.9。合理控制成像系统的有效焦距和入瞳直径,使得成像系统获得较大的通光口径。通光口径扩大可以提高采光,从而能够在比较暗的情况下降低噪点,提高成像质量。优选地,1.8《f/epd≤1.9。
85.在本实施例中,第一透镜靠近入光侧的表面至成像系统的成像面的轴上距离ttl与成像面上有效像素区域对角线长的一半imgh之间满足:ttl/imgh<1.2。合理设置第一透镜靠近入光侧的表面至成像面的轴上距离和成像面上有效像素区域对角线长的一半之间的比值,确保成像系统具有轻薄的特点,有利于成像系统的小型化。优选地,1.1<ttl/imgh<1.2。
86.在本实施例中,第一透镜的有效焦距f1与第一透镜靠近入光侧的表面的曲率半径r1之间满足:2.0<f1/r1<2.5。合理设置第一透镜的有效焦距与第一透镜靠近入光侧的表面的曲率半径的比值,有助于保证成像系统性能的同时降低第一透镜的加工敏感性。优选地,2.2<f1/r1<2.4。
87.在本实施例中,第一透镜的有效焦距f1与第一透镜靠近出光侧的表面的曲率半径r2之间满足:1.5<r2/f1<2.0。通过将r2/f1限制在合理的范围内,有利于第一透镜的有效焦距的合理设置,有助于增大成像系统的整体焦距,进而使成像系统具有大像面。优选地,1.55<r2/f1<1.8。
88.在本实施例中,第二透镜的有效焦距f2与第二透镜靠近出光侧的表面的曲率半径r4之间满足:-3.5<f2/r4<-2.0。通过将f2/r4限制在合理的范围内,使得第二透镜的有效焦距合理设置,有助于调整光线位置,缩短成像系统的总长,有利于成像系统的小型化。优选地,-3.3<f2/r4<-2.3。
89.在本实施例中,第四透镜靠近入光侧的表面的曲率半径r7与第四透镜靠近出光侧的表面的曲率半径r8之间满足:1.0≤r7/r8<1.6。通过将r7/r8限制在合理的范围内,有利于控制轴外视场光线在成像面的入射角度,增加与感光元件和带通滤光片的匹配性。优选地,1.0≤r7/r8<1.55。
90.在本实施例中,第五透镜的有效焦距f5与第五透镜靠近出光侧的表面的曲率半径r10之间满足:-2.0<f5/r10<-1.0。通过约束第五透镜的有效焦距和第五透镜靠近出光侧的表面的曲率半径的比值在一定范围,有利于成像系统具有良好的成像质量。优选地,-1.9<f5/r10<-1.1。
91.在本实施例中,第六透镜靠近入光侧的表面的曲率半径r11与第六透镜靠近出光侧的表面的曲率半径r12之间满足:-3.5<r11/r12<-3.0。通过约束第六透镜靠近入光侧的表面的曲率半径和第六透镜靠近出光侧的表面的曲率半径的比值在一定范围,使得轴上视场和轴外视场的彗差较小,使成像系统具有良好的成像质量。优选地,-3.45<r11/r12<-3.1。
92.在本实施例中,第一透镜在光轴上的中心厚度ct1与第一透镜的边缘厚度et1之间满足:2.5<ct1/et1<3.0。合理分配第一透镜在光轴上的中心厚度以及第一透镜的边缘厚度之间的比值,有利于提升成像系统的透镜装配稳定性,增加成像系统工作的稳定性。优选地,2.8<ct1/et1<3.0。
93.在本实施例中,第五透镜在光轴上的中心厚度ct5与第五透镜的边缘厚度et5之间
满足:2.0<ct5/et5<3.0。合理分配第五透镜在光轴上的中心厚度以及第五透镜的边缘厚度之间的比值,有利于降低成像系统的敏感度,有利于实现成像系统大光圈和高解像力特性。优选地,2.2<ct5/et5<2.9。
94.在本实施例中,第二透镜和第三透镜在光轴上的空气间隔t23、第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag22之间满足:1.5<t23/sag22<2.6。通过约束第二透镜和第三透镜在光轴上的空气间隔与第二透镜靠近出光侧的表面和光轴的交点至第二透镜靠近出光侧的表面的有效半径顶点之间的轴上距离的比值在合理的范围内,可以有效的控制成像系统中间透镜对像差的贡献程度,减小成像系统的像差,提高成像质量。优选地,1.8<t23/sag22<2.6。
95.在本实施例中,第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离sag62、第五透镜和第六透镜在光轴上的空气间隔t56之间满足:-2.0<sag62/t56<-1.0。通过第六透镜靠近出光侧的表面和光轴的交点至第六透镜靠近出光侧的表面的有效半径顶点之间的轴上距离与第五透镜和第六透镜在光轴上的空气间隔的比值在一定范围,使得轴上视场和轴外视场的彗差较小,使成像系统具有良好的成像质量。优选地,-1.8<sag62/t56<-1.1。
96.在本实施例中,第二透镜的阿贝数v2与第三透镜的阿贝数v3之间满足:v3-v2<20。通过约束第二透镜的阿贝数与第三透镜的阿贝数之差在一定范围,有利于改善系统色差,保证成像系统的成像质量。
97.在本实施例中,第三透镜的阿贝数v3与第四透镜的阿贝数v4之间满足:v3-v4<15。通过约束第三透镜的阿贝数与第四透镜的阿贝数之差在一定范围,可以控制成像系统材料搭配,有利于降低成本。
98.在本技术中的成像系统可采用多片透镜,例如上述的六片。通过合理分配各透镜的屈折力、面形、各透镜的中心厚度以及各透镜之间的轴上距离等,可有效增大成像系统的孔径、降低镜头的敏感度并提高镜头的可加工性,使得成像系统更有利于生产加工并且可适用于智能手机等便携式电子设备。
99.在本技术中,各透镜的镜面中的至少一个为非球面镜面。非球面透镜的特点是:从透镜中心到透镜周边,曲率是连续变化的。与从透镜中心到透镜周边具有恒定曲率的球面透镜不同,非球面透镜具有更佳的曲率半径特性,具有改善歪曲像差及改善像散像差的优点。采用非球面透镜后,能够尽可能地消除在成像的时候出现的像差,从而改善成像质量。
100.然而,本领域技术人员应当理解,在未背离本技术要求保护的技术方案的情况下,可改变构成成像系统的透镜数量,来获得本说明书中描述的各个结果和优点。例如,虽然在实施方式中以六片透镜为例进行了描述,但是成像系统不限于包括六片透镜。如需要,该成像系统还可包括其它数量的透镜。
101.下面参照附图进一步描述可适用于上述实施方式的成像系统的具体面型、参数的举例。
102.需要说明的是,下述的例子一至例子五中的任何一个例子均适用于本技术的所有实施例。
103.例子一
104.如图1至图5所示,描述了本技术例子一的成像系统。图1示出了例子一的成像系统
结构的示意图。
105.如图1所示,成像系统由入光侧至出光侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤波片e7和成像面s15。
106.第一透镜e1具有正屈折力,第一透镜靠近入光侧的表面s1为凸形状,第一透镜靠近出光侧的表面s2为凹形状。第二透镜e2具负屈折力,第二透镜靠近入光侧的表面s3为凸形状,第二透镜靠近出光侧的表面s4为凹形状。第三透镜e3具有正屈折力,第三透镜靠近入光侧的表面s5为凸形状,第三透镜靠近出光侧的表面s6为凸形状。第四透镜e4具有负屈折力,第四透镜靠近入光侧的表面s7为凸形状,第四透镜靠近出光侧的表面s8为凹形状。第五透镜e5具有正屈折力,第五透镜靠近入光侧的表面s9为凸形状,第五透镜靠近出光侧的表面s10为凸形状。第六透镜e6具有负屈折力,第六透镜靠近入光侧的表面s11为凹形状,第六透镜靠近出光侧的表面s12为凹形状。滤波片e7具有滤波片的入光侧面s13和滤波片的出光侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
107.在本例子中,成像系统的总有效焦距f为5.07mm,成像系统的总长ttl为5.95mm以及像高imgh为5.04mm。
108.表1示出了例子一的成像系统的基本结构参数表,其中,曲率半径、厚度/距离、焦距和有效半径的单位均为毫米(mm)。
[0109][0110][0111]
表1
[0112]
在例子一中,第一透镜e1至第六透镜e6中的任意一个透镜靠近入光侧的表面和出光侧面均为非球面,各非球面透镜的面型可利用但不限于以下非球面公式进行限定:
[0113][0114]
其中,x为非球面沿光轴方向在高度为h的位置时,距非球面顶点的距离矢高;c为
非球面的近轴曲率,c=1/r(即,近轴曲率c为上表1中曲率半径r的倒数);k为圆锥系数;ai是非球面第i-th阶的修正系数。下表2给出了可用于例子一中各非球面镜面s1-s12的高次项系数a4、a6、a8、a10、a12、a14、a16、a18、a20、a22、a24、a26、a28、a30。
[0115]
面号a4a6a8a10a12a14a16s11.2430e-024.7575e-04-1.1130e-03-5.1401e-04-2.2956e-04-4.8923e-05-2.9277e-05s2-4.1795e-026.1072e-03-1.9661e-032.1588e-043.4558e-06-4.8467e-05-2.6103e-05s3-1.7675e-021.6470e-02-1.2888e-031.0064e-032.6742e-05-4.0112e-05-4.0198e-05s42.3486e-021.1122e-025.2728e-049.8037e-042.8178e-041.1459e-043.6236e-05s5-8.6773e-02-5.5541e-03-5.5155e-044.2660e-042.1116e-041.2069e-043.6936e-05s6-1.7727e-01-8.5135e-042.6436e-033.6255e-031.2947e-036.8415e-042.0185e-04s7-6.3646e-012.8986e-02-1.3979e-024.1516e-031.3394e-031.5805e-036.0494e-04s8-9.2444e-011.6919e-01-2.3920e-021.4157e-03-2.1301e-031.4197e-03-1.7201e-04s9-1.4429e 001.8395e-011.0122e-01-4.5402e-02-2.1058e-022.1372e-02-9.4704e-05s101.0131e 00-4.1576e-011.2047e-011.9090e-02-2.5156e-021.2039e-02-4.2065e-03s113.1447e-015.5855e-01-3.4703e-012.2988e-01-1.4708e-017.0265e-02-2.1694e-02s12-5.8814e 001.4467e 00-3.1201e-011.8518e-01-1.1158e-013.7895e-02-3.1798e-02面号a18a20a22a24a26a28a30s1-5.0236e-06-1.2552e-05-6.5623e-06-4.9933e-06-1.9212e-06-1.0640e-061.5008e-06s2-2.8452e-05-1.0252e-05-1.1460e-05-3.2423e-061.9201e-075.8258e-06-1.3762e-06s3-2.5991e-05-1.9495e-05-1.1098e-05-1.1462e-05-1.5715e-063.3608e-065.9817e-06s41.3953e-05-3.3378e-06-4.4220e-06-8.7909e-06-4.6760e-06-2.3817e-061.9687e-06s51.5976e-054.6470e-061.2267e-06-8.8294e-074.1722e-071.9312e-06-1.0048e-06s69.4083e-051.2013e-053.1548e-06-6.6915e-06-3.3147e-06-4.7066e-06-6.2628e-07s73.0783e-049.0148e-05-1.6199e-05-3.7168e-05-3.2301e-05-2.0437e-05-9.1833e-06s83.1582e-05-4.4034e-05-6.6235e-061.3929e-051.3401e-06-1.0863e-06-3.4844e-06s9-5.3843e-031.1226e-038.8278e-04-3.4152e-04-1.8131e-041.7658e-04-4.5618e-05s102.4221e-033.3668e-03-2.2019e-03-4.3424e-042.0029e-041.1226e-05-4.5950e-05s114.9849e-03-4.9855e-035.0857e-03-3.5360e-031.0677e-03-1.0290e-04-1.6449e-05s121.7882e-02-2.1157e-034.3825e-03-5.2766e-03-2.5580e-04-3.3122e-049.5968e-04
[0116]
表2
[0117]
图2示出了例子一的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图3示出了例子一的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图4示出了例子一的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图5示出了例子一的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0118]
根据图2至图5可知,例子一所给出的成像系统能够实现良好的成像品质。
[0119]
例子二
[0120]
如图6至图10所示,描述了本技术例子二的成像系统。在本例子及以下例子中,为简洁起见,将省略部分与例子一相似的描述。图6示出了例子二的成像系统结构的示意图。
[0121]
如图6所示,成像系统由入光侧至出光侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤波片e7和成像面s15。
[0122]
第一透镜e1具有正屈折力,第一透镜靠近入光侧的表面s1为凸形状,第一透镜靠近出光侧的表面s2为凹形状。第二透镜e2具负屈折力,第二透镜靠近入光侧的表面s3为凸形状,第二透镜靠近出光侧的表面s4为凹形状。第三透镜e3具有正屈折力,第三透镜靠近入
光侧的表面s5为凹形状,第三透镜靠近出光侧的表面s6为凸形状。第四透镜e4具有负屈折力,第四透镜靠近入光侧的表面s7为凸形状,第四透镜靠近出光侧的表面s8为凹形状。第五透镜e5具有正屈折力,第五透镜靠近入光侧的表面s9为凸形状,第五透镜靠近出光侧的表面s10为凸形状。第六透镜e6具有负屈折力,第六透镜靠近入光侧的表面s11为凹形状,第六透镜靠近出光侧的表面s12为凹形状。滤波片e7具有滤波片的入光侧面s13和滤波片的出光侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0123]
在本例子中,成像系统的总有效焦距f为5.07mm,成像系统的总长ttl为5.95mm以及像高imgh为5.04mm。
[0124]
表3示出了例子二的成像系统的基本结构参数表,其中,曲率半径、厚度/距离、焦距和有效半径的单位均为毫米(mm)。
[0125][0126][0127]
表3
[0128]
表4示出了可用于例子二中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0129]
面号a4a6a8a10a12a14a16s13.7501e-03-3.0900e-03-2.3703e-03-9.1108e-04-3.1251e-04-6.3236e-05-2.0520e-05s2-5.4645e-024.8676e-03-2.3748e-031.3687e-04-5.3766e-05-8.0017e-05-3.0353e-05s3-1.5152e-021.7790e-02-1.2746e-031.0871e-03-2.7216e-05-3.6977e-05-3.7877e-05s42.0956e-021.0080e-023.5671e-048.4254e-042.6690e-048.9022e-054.6381e-05s5-7.7187e-02-4.2594e-036.3489e-046.5010e-044.2889e-041.1400e-047.7387e-05s6-1.5035e-012.8765e-034.0758e-033.1014e-031.0917e-034.5927e-041.6041e-04s7-6.4140e-011.2319e-02-1.4558e-021.0303e-023.1713e-031.6668e-039.2225e-05s8-1.0218e 001.6725e-01-3.6127e-021.3470e-02-3.9394e-036.5212e-04-2.1884e-04s9-1.2005e 008.0625e-029.1418e-02-1.7882e-02-2.1965e-028.2560e-034.7295e-03s109.0973e-01-3.8142e-011.2024e-018.5692e-03-2.0584e-023.5710e-03-3.2258e-06s111.6906e-015.2365e-01-3.1763e-011.9401e-01-1.1417e-015.1112e-02-1.4219e-02
s12-5.5991e 001.3309e 00-3.0240e-011.6454e-01-8.7569e-023.0052e-02-2.6865e-02面号a18a20a22a24a26a28a30s1-4.1802e-06-9.1038e-06-4.2601e-067.9114e-073.3644e-062.7977e-062.5530e-06s2-1.5863e-051.7529e-063.4175e-065.3167e-065.2690e-064.5596e-06-1.3568e-06s3-6.9345e-06-1.0317e-051.3491e-06-8.9015e-062.1603e-063.9209e-069.2411e-06s41.0522e-056.5810e-062.3012e-064.0330e-061.1695e-06-2.2725e-06-6.8025e-06s51.1284e-061.9778e-05-6.2691e-065.4806e-06-4.5211e-062.7025e-06-1.7139e-06s64.6339e-052.1091e-05-3.5137e-062.4064e-06-9.2750e-06-1.9587e-06-7.1422e-06s7-1.1330e-04-2.1744e-04-8.9115e-05-5.0049e-054.0069e-06-1.3294e-063.4964e-08s82.1981e-04-9.2094e-052.9665e-05-2.1966e-053.5878e-06-1.1641e-054.6627e-06s9-2.0854e-03-7.4461e-041.4324e-042.0173e-04-1.3301e-054.0139e-05-3.5320e-05s101.5404e-032.1708e-03-6.9908e-04-4.1641e-048.5510e-056.2887e-05-6.8036e-07s114.7179e-04-1.1646e-032.6994e-03-2.7114e-031.2766e-03-3.6341e-041.3569e-06s121.2495e-02-2.3549e-033.5857e-03-3.8044e-03-9.7799e-05-1.7382e-046.4720e-04
[0130]
表4
[0131]
图7示出了例子二的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图8示出了例子二的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图9示出了例子二的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图10示出了例子二的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0132]
根据图7至图10可知,例子二所给出的成像系统能够实现良好的成像品质。
[0133]
例子三
[0134]
如图11至图15所示,描述了本技术例子三的成像系统。图11示出了例子三的成像系统结构的示意图。
[0135]
如图11所示,成像系统由入光侧至出光侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤波片e7和成像面s15。
[0136]
第一透镜e1具有正屈折力,第一透镜靠近入光侧的表面s1为凸形状,第一透镜靠近出光侧的表面s2为凹形状。第二透镜e2具负屈折力,第二透镜靠近入光侧的表面s3为凸形状,第二透镜靠近出光侧的表面s4为凹形状。第三透镜e3具有负屈折力,第三透镜靠近入光侧的表面s5为凹形状,第三透镜靠近出光侧的表面s6为凸形状。第四透镜e4具有负屈折力,第四透镜靠近入光侧的表面s7为凸形状,第四透镜靠近出光侧的表面s8为凹形状。第五透镜e5具有正屈折力,第五透镜靠近入光侧的表面s9为凸形状,第五透镜靠近出光侧的表面s10为凸形状。第六透镜e6具有负屈折力,第六透镜靠近入光侧的表面s11为凹形状,第六透镜靠近出光侧的表面s12为凹形状。滤波片e7具有滤波片的入光侧面s13和滤波片的出光侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0137]
在本例子中,成像系统的总有效焦距f为5.06mm,成像系统的总长ttl为5.95mm以及像高imgh为5.04mm。
[0138]
表5示出了例子三的成像系统的基本结构参数表,其中,曲率半径、厚度/距离、焦距和有效半径的单位均为毫米(mm)。
[0139][0140]
表5
[0141]
表6示出了可用于例子三中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0142]
面号a4a6a8a10a12a14a16s12.6483e-03-3.1226e-03-2.9651e-03-9.4259e-04-4.0081e-04-1.2678e-05-3.9833e-05s2-5.7153e-024.6478e-03-2.0377e-039.2690e-05-7.2131e-06-1.1937e-04-1.8479e-05s3-1.2652e-021.8080e-02-5.8632e-041.0682e-03-1.5397e-05-5.1528e-05-5.2315e-05s42.8217e-021.0658e-028.3722e-047.3373e-041.9453e-042.2131e-051.4838e-05s5-8.5973e-02-4.3141e-039.1368e-045.2596e-043.8645e-042.7367e-056.0287e-05s6-1.7432e-018.9871e-034.3356e-034.0937e-039.9242e-045.5853e-045.2219e-05s7-7.2654e-011.1320e-02-1.1155e-021.5018e-025.0700e-031.8789e-03-6.7092e-04s8-1.0192e 001.6230e-01-3.3039e-021.1984e-02-3.0801e-035.4260e-04-3.7730e-04s9-1.1695e 007.1362e-028.4588e-02-1.5895e-02-1.9050e-027.3183e-033.4602e-03s108.5388e-01-3.5398e-019.6318e-021.5942e-02-1.7891e-021.9486e-03-1.5581e-03s112.0349e-015.2435e-01-3.2343e-011.9696e-01-1.1835e-015.4436e-02-1.6437e-02s12-5.7982e 001.3936e 00-3.2401e-011.6009e-01-9.3144e-023.0424e-02-2.7624e-02面号a18a20a22a24a26a28a30s12.2504e-05-1.4418e-059.4609e-06-3.8402e-066.8371e-06-2.9154e-065.4506e-06s2-2.1733e-051.9080e-051.2728e-061.0215e-051.7052e-085.6669e-06-7.0389e-06s3-4.0024e-06-1.0714e-055.5228e-06-6.7287e-066.7164e-062.5684e-069.5880e-06s4-1.1075e-051.0025e-06-3.3631e-061.0404e-06-4.7507e-06-1.1064e-06-1.7077e-06s5-2.6844e-052.1367e-05-1.6037e-051.0151e-05-6.3465e-067.5053e-06-3.2876e-06s65.1025e-05-2.6494e-05-5.5985e-07-1.9609e-05-5.0308e-06-1.2065e-05-2.4548e-06s7-7.1269e-04-5.4795e-04-1.3548e-04-2.4378e-067.2437e-054.5498e-052.3527e-05s83.7683e-04-1.1842e-042.1342e-05-4.7025e-051.1035e-05-9.1152e-064.2395e-06s9-9.5889e-04-7.4614e-04-7.3577e-068.1324e-056.9443e-051.8866e-05-3.3374e-05s109.4280e-041.9853e-03-8.7582e-05-3.5234e-043.1870e-051.6915e-054.5259e-06s111.1824e-03-6.1267e-041.9931e-03-2.6022e-031.4802e-03-6.1538e-041.0625e-04
s121.3384e-02-1.8402e-033.1390e-03-4.3921e-034.7432e-05-1.4126e-046.3158e-04
[0143]
表6
[0144]
图12示出了例子三的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图13示出了例子三的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图14示出了例子三的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图15示出了例子三的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0145]
根据图12至图15可知,例子三所给出的成像系统能够实现良好的成像品质。
[0146]
例子四
[0147]
如图16至图20所示,描述了本技术例子四的成像系统。图16示出了例子四的成像系统结构的示意图。
[0148]
如图16所示,成像系统由入光侧至出光侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤波片e7和成像面s15。
[0149]
第一透镜e1具有正屈折力,第一透镜靠近入光侧的表面s1为凸形状,第一透镜靠近出光侧的表面s2为凹形状。第二透镜e2具负屈折力,第二透镜靠近入光侧的表面s3为凸形状,第二透镜靠近出光侧的表面s4为凹形状。第三透镜e3具有负屈折力,第三透镜靠近入光侧的表面s5为凹形状,第三透镜靠近出光侧的表面s6为凹形状。第四透镜e4具有负屈折力,第四透镜靠近入光侧的表面s7为凸形状,第四透镜靠近出光侧的表面s8为凹形状。第五透镜e5具有正屈折力,第五透镜靠近入光侧的表面s9为凸形状,第五透镜靠近出光侧的表面s10为凸形状。第六透镜e6具有负屈折力,第六透镜靠近入光侧的表面s11为凹形状,第六透镜靠近出光侧的表面s12为凹形状。滤波片e7具有滤波片的入光侧面s13和滤波片的出光侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0150]
在本例子中,成像系统的总有效焦距f为5.07mm,成像系统的总长ttl为5.95mm以及像高imgh为5.04mm。
[0151]
表7示出了例子四的成像系统的基本结构参数表,其中,曲率半径、厚度/距离、焦距和有效半径的单位均为毫米(mm)。
[0152][0153]
表7
[0154]
表8示出了可用于例子四中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0155]
[0156][0157]
表8
[0158]
图17示出了例子四的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图18示出了例子四的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图19示出了例子四的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图20示出了例子四的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0159]
根据图17至图20可知,例子四所给出的成像系统能够实现良好的成像品质。
[0160]
例子五
[0161]
如图21至图25所示,描述了本技术例子五的成像系统。图21示出了例子五的成像系统结构的示意图。
[0162]
如图21所示,成像系统由入光侧至出光侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤波片e7和成像面s15。
[0163]
第一透镜e1具有正屈折力,第一透镜靠近入光侧的表面s1为凸形状,第一透镜靠近出光侧的表面s2为凹形状。第二透镜e2具负屈折力,第二透镜靠近入光侧的表面s3为凸形状,第二透镜靠近出光侧的表面s4为凹形状。第三透镜e3具有正屈折力,第三透镜靠近入光侧的表面s5为凹形状,第三透镜靠近出光侧的表面s6为凸形状。第四透镜e4具有负屈折力,第四透镜靠近入光侧的表面s7为凸形状,第四透镜靠近出光侧的表面s8为凹形状。第五透镜e5具有正屈折力,第五透镜靠近入光侧的表面s9为凹形状,第五透镜靠近出光侧的表面s10为凸形状。第六透镜e6具有负屈折力,第六透镜靠近入光侧的表面s11为凹形状,第六透镜靠近出光侧的表面s12为凹形状。滤波片e7具有滤波片的入光侧面s13和滤波片的出光侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0164]
在本例子中,成像系统的总有效焦距f为5.06mm,成像系统的总长ttl为5.95mm以及像高imgh为5.04mm。
[0165]
表9示出了例子五的成像系统的基本结构参数表,其中,曲率半径、厚度/距离、焦
距和有效半径的单位均为毫米(mm)。
[0166][0167]
表9
[0168]
表10示出了可用于例子五中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0169]
[0170][0171]
表10
[0172]
图22示出了例子五的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图23示出了例子五的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图24示出了例子五的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图25示出了例子五的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0173]
根据图12至图25可知,例子五所给出的成像系统能够实现良好的成像品质。
[0174]
综上,例子一至例子五分别满足表11中所示的关系。
[0175]
条件式/实施例12345f/epd1.881.901.901.901.90fov88.187.887.887.787.7ttl/imgh1.181.181.181.181.18f1/r12.372.362.382.362.34r2/f11.611.641.571.611.71f2/r4-2.74-2.39-2.73-2.57-3.14r7/r81.271.511.221.231.04f5/r10-1.21-1.17-1.19-1.18-1.88f/f6-1.68-1.61-1.62-1.62-1.70r11/r12-3.29-3.31-3.19-3.28-3.42ct1/et12.892.922.952.942.86ct5/et52.722.732.852.762.47t12/sag121.281.661.341.441.26t23/sag222.042.112.462.591.93(sag51 sag52)/(sag51-sag52)-2.67-2.20-2.29-2.26-3.77sag62/t56-1.35-1.41-1.55-1.52-1.18
[0176]
表11
[0177]
表12给出了例子一至例子五的成像系统的有效焦距f,各透镜的有效焦距f1至f6。
[0178]
[0179][0180]
表12
[0181]
本技术还提供一种成像装置,其电子感光元件可以是感光耦合元件(ccd)或互补性氧化金属半导体元件(cmos)。成像装置可以是诸如数码相机的独立成像设备,也可以是集成在诸如手机等移动电子设备上的成像模块。该成像装置装配有以上描述的成像系统。
[0182]
显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0183]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
[0184]
需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
[0185]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。