3d打印设备、3d打印系统和3d打印方法
技术领域
1.本发明属于建筑工程领域,具体地,涉及一种3d打印设备、3d打印系统和3d打印方法。
背景技术:
2.作为一种信息化时代的新兴建造技术,通过3d打印技术进行建筑的建造是促进我国建筑业转型升级的有效抓手,具有重要的研究价值和广阔的应用前景。
3.在目前的相关技术中,3d打印设备一般采用的结构为龙门架或者类似的系统搭载打印喷头,通过龙门架移动打印喷头实现打印,这种结构存在以下问题:1、需要在目标打印区域搭建龙门架,而龙门架的搭建周期较长,且搭建完成后本身无法移动,完成打印后需要拆除,费时费力,效率较低;2、打印喷头的移动被限制在龙门架的框架之内,导致该3d打印设备无法满足打印体积大于龙门架的实体,而大尺寸的龙门架造价高昂、精度低、搭建困难,适用性较差;3、在搭建龙门架前,需要对目标打印区域进行较长时间的地基修建,对施工场景有较严格的限制,实用性较差。
4.目前还有将打印喷头搭载于工业机器人,通过工业机器人移动打印喷头实现打印的相关技术,但是工业机器人一般体积较小,仅适用于体积较小的实体打印,在建筑行业内适用性较差,而且造价十分昂贵,成本较高,难以普及,而且,工业机器人缺少稳定机构,不能适用于起伏较大或者形状较复杂的地形,即不能适用于多种地形环境。
技术实现要素:
5.针对现有技术中的上述不足或缺陷,本发明提供一种3d打印设备、3d打印系统和3d打印方法,旨在解决目前建筑行业的相关技术中,3d打印设备搭建难度高、适用性和实用性较差的技术问题。
6.为实现上述目的,本发明提供了一种3d打印设备,所述3d打印设备包括:
7.行走机构,包括行走组件和装设于所述行走组件上的支撑平台,所述行走组件能够带动所述支撑平台行走;
8.回转机构,包括可回转地装设于所述支撑平台上的回转台;
9.动臂机构,装设于所述回转台上且能够折叠和变幅;
10.打印喷头,装设于所述动臂机构的末端;以及
11.稳定机构,包括多个可转动地装设于所述支撑平台两侧的支腿组件,所述支腿组件能够侧向向外转动展开或向内转动收回。
12.可选地,所述支腿组件均包括:
13.连接件,可转动地连接于所述支撑平台;
14.锁止件,能够插接于所述连接件和所述支撑平台,以使所述连接件相对所述支撑平台固定;以及
15.支腿,连接于所述连接件并随所述连接件转动。
16.可选地,所述支腿包括活动端和铰接于所述连接件的铰接端,所述支腿组件还包括:
17.套装件,固定套装于所述支腿并位于所述活动端和所述铰接端之间;和
18.支腿伸缩驱动件,包括铰接于所述连接件的固定端和铰接于所述套装件的伸缩端,所述支腿伸缩驱动件用于通过所述伸缩端的伸缩动作带动所述支腿相对所述连接件在竖直方向上转动。
19.可选地,所述支撑平台的前端部两侧分别设置有两个相对称设置的所述支腿组件,所述支撑平台的后端部两侧分别设置有两个相对称设置的所述支腿组件。
20.可选地,所述动臂机构的末端设置有调平机构,所述调平机构包括:
21.固定座,固定安装于所述动臂机构的末端;
22.支架,与所述固定座铰接并用于所述打印喷头固定安装;以及
23.调平电机,安装于所述固定座并与所述支架驱动连接,所述调平电机用于驱动所述支架带动所述打印喷头转动,以使所述打印喷头保持竖直设置。
24.可选地,所述支架呈u型并包括:
25.两个端板,两个所述端板相对设置并分别延伸至所述固定座的两侧,两个所述端板分别与所述固定座铰接;和
26.中间板,两端分别与两个所述端板相连,用于所述打印喷头固定安装。
27.可选地,所述动臂机构包括:
28.基础臂节,一端铰接于所述回转台并能够相对所述回转台转动;和
29.伸缩臂节,一端铰接于所述基础臂节的另一端并能够相对所述基础臂节转动,所述伸缩臂节在长度方向上能够伸缩。
30.可选地,所述伸缩臂节包括相互嵌套的外臂和内臂,所述外臂一端铰接于所述基础臂节的另一端,所述内臂的伸出端能够从所述外臂的另一端伸出或回缩。
31.可选地,所述动臂机构还包括末端臂节,所述末端臂节的一端铰接于所述内臂的伸出端,所述内臂内部设置有末端臂节伸缩驱动件,所述末端臂节伸缩驱动件的伸缩端从所述内臂的伸出端伸出并与所述末端臂节铰接,用于驱动所述末端臂节相对所述内臂转动。
32.本发明还提供一种3d打印系统,所述3d打印系统包括控制系统和多个如上述的3d打印设备,所述控制系统用于控制多个所述3d打印设备同时进行相同或者不同的打印操作。
33.本发明还提供一种基于上述的3d打印设备的3d打印方法,所述3d打印方法包括:
34.所述3d打印设备行走至目标打印区域,展开多个支腿组件并调平所述支撑平台;
35.展开所述动臂机构,定位并调平所述打印喷头的初始位置;
36.根据输入的打印参数控制动臂机构的变幅动作以控制所述打印喷头的移动进行实体的打印。
37.可选地,所述3d打印方法还包括:
38.在实体的打印过程中,实时检测实体的尺寸参数并根据所检测到的尺寸参数判断实体是否满足打印要求,若不满足,则暂停所述打印喷头的打印并对打印参数进行调整。
39.可选地,所述3d打印方法还包括:
40.当实体的打印完成后进入下一个实体的打印时,判断是否在原位置打印,若否,则收回多个支腿组件并折叠所述动臂机构,然后所述3d打印设备行走至下一个目标打印区域。
41.通过上述技术方案,本发明的3d打印设备能够通过行走机构自动地行走移动至建筑现场进行打印建造,无需在现场搭建任何架体或者轨道结构,适用性和灵活性良好,能够极大地提高打印建造建筑的效率,而且,该3d打印设备包括装设于支撑平台上的回转台和装设于回转台上的动臂机构,打印喷头装设于动臂机构的末端,如此设置,该3d打印设备固定于一个位置后即可在其前后左右全方位实现多个建筑实体的打印或实现体积较大的建筑实体的打印,具有良好的实用性;此外,该3d打印设备还包括多个支腿组件,当3d打印设备处于行走时,支腿组件能够收回,能够缩小3d打印设备的整体体积,使得3d打印设备能够穿过较窄小的道路,具有良好的实用性,当3d打印设备行走至打印区域时,支腿组件能够侧向向外转动展开,对3d打印设备进行支撑并保持支撑平台水平,有效保证打印的准确性,使得3d打印设备适用于多种不同的地形。
42.本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
43.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
44.图1为本发明的一实施方式中的3d打印设备的结构示意图;
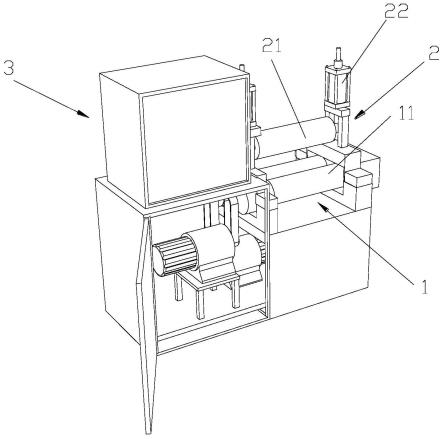
45.图2为图1中a处的局部放大图;
46.图3为图1中的动臂机构的结构示意图;
47.图4为图1中的3d打印设备行走状态的结构示意图;
48.图5为基于图1中的3d打印设备的3d打印方法的流程图。
49.附图标记说明:
[0050]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
行走机构
[0051]
11
ꢀꢀꢀꢀꢀꢀꢀꢀ
行走组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑平台
[0052]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
回转台
[0053]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
动臂机构
[0054]
31
ꢀꢀꢀꢀꢀꢀꢀꢀ
基础臂节
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
伸缩臂节
[0055]
32a
ꢀꢀꢀꢀꢀꢀꢀ
外臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32b
ꢀꢀꢀꢀꢀꢀꢀꢀ
内臂
[0056]
33
ꢀꢀꢀꢀꢀꢀꢀꢀ
末端臂节
[0057]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
打印喷头
[0058]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支腿组件
[0059]
51
ꢀꢀꢀꢀꢀꢀꢀꢀ
连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支腿
[0060]
53
ꢀꢀꢀꢀꢀꢀꢀꢀ
套装件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支腿伸缩驱动件
[0061]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
调平机构
[0062]
61
ꢀꢀꢀꢀꢀꢀꢀꢀ
固定座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支架
[0063]
62a
ꢀꢀꢀꢀꢀꢀꢀ
端板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62b
ꢀꢀꢀꢀꢀꢀꢀꢀ
中间板
具体实施方式
[0064]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0065]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0066]
在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的或者是针对竖直、垂直或重力方向上而言的各部件相互位置关系描述用词。
[0067]
下面将参考附图并结合实施例来详细说明本发明。
[0068]
本发明首先提供了一种3d打印设备,参照附图1至附图4所示,3d打印设备包括行走机构1、回转机构、动臂机构3、打印喷头4以及稳定机构,行走机构1包括行走组件11和装设于行走组件11上的支撑平台12,行走组件11能够带动支撑平台12行走,回转机构包括可回转地装设于支撑平台12上的回转台2,动臂机构3装设于回转台2上且能够折叠和变幅,打印喷头4装设于动臂机构3的末端,稳定机构包括多个可转动地装设于支撑平台12两侧的支腿组件5,支腿组件5能够侧向向外转动展开或向内转动收回。
[0069]
可以理解地,本发明的3d打印设备能够通过行走机构1自动地行走移动至建筑现场进行打印建造,无需在现场搭建任何架体或者轨道结构,适用性和灵活性良好,能够极大地提高打印建造建筑的效率,而且,该3d打印设备包括装设于支撑平台12上的回转台2和装设于回转台2上的动臂机构3,打印喷头4装设于动臂机构3的末端,如此设置,该3d打印设备固定于一个位置后即可在其前后左右全方位实现多个建筑实体的打印或实现体积较大的建筑实体的打印,具有良好的实用性。
[0070]
此外,该3d打印设备还包括多个支腿组件5,当3d打印设备处于行走时,支腿组件5能够收回,能够缩小3d打印设备的整体体积,使得3d打印设备能够穿过较窄小的道路,具有良好的实用性,当3d打印设备行走至打印区域时,支腿组件5能够侧向向外转动展开,对3d打印设备进行支撑并调平支撑平台12,有效保证打印的准确性,使得3d打印设备适用于多种不同的地形。
[0071]
在实际应用时,行走组件采用履带式行走组件或轮胎式行走组件,并可采用电机或液压马达作为动力源提供驱动行走的动力。
[0072]
在一种实施例中,参照附图1和附图4所示,支腿组件5均包括连接件51、锁止件以及支腿52,连接件51可转动地连接于支撑平台12,锁止件能够插接于连接件51和支撑平台12,以使连接件51相对支撑平台12固定,支腿52连接于连接件51并随连接件51转动。
[0073]
可以理解地,支腿52展开时可通过连接件51相对支撑平台12转动以调节展开的角度大小并通过锁止件锁止固定,如此,支腿52更好地适应不同的地形需求,具有良好的适应能力。
[0074]
在本实施例中,具体地,连接件51具有与支撑平台12连接的连接端部,连接件51的连接端部通过一铰接轴与支撑平台12铰接,连接件51的连接端部环绕该铰接轴开设多个间隔分布的第一锁止孔,支撑平台12开设与锁止孔对应的第二锁止孔,通过转动连接件51的连接端部,可选择地使第二锁止孔与多个第一锁止孔中的一个对齐,通过锁止件依次插入第二锁止孔和第一锁止孔,即可实现连接件51的连接端部相对支撑平台12固定锁止,即实
现连接件51相对支撑平台12固定锁止,进一步地,锁止件为一插销。
[0075]
在本实施例中,支腿52的末端可拆卸地连接有支撑垫。
[0076]
在一种实施例中,参照附图1和附图4所示,支腿52包括活动端和铰接于连接件51的铰接端,支腿组件5还包括套装件53和支腿伸缩驱动件54,套装件53固定套装于支腿52并位于活动端和铰接端之间,支腿伸缩驱动件54包括铰接于连接件51的固定端和铰接于套装件53的伸缩端,支腿伸缩驱动件54用于通过伸缩端的伸缩动作带动支腿52相对连接件51在竖直方向上转动,如此设置,通过支腿伸缩驱动件54驱动支腿52转动,即可调节支腿52末端的位置,从而实现支撑平台12的找平。
[0077]
在实际的应用过程中,当支腿组件5处于收回状态时,支腿伸缩驱动件54的伸缩端收缩以使支腿52末端处于被提起的位置,避免该3d打印设备行走的过程中支腿52末端与地面触碰,当支腿组件5处于展开状态时,支腿伸缩驱动件54的伸缩端伸出以使支腿52末端处于被下放的位置,使得支腿52末端能够抵撑于地面。
[0078]
在本实施例中,具体地,支腿伸缩驱动件54为气缸或者液压缸。
[0079]
在本实施例中,具体地,支腿伸缩驱动件54的固定端与连接件51的铰接处位于支腿52的铰接端与连接件51的铰接处的上方。
[0080]
在一种实施例中,参照附图1和附图4所示,支撑平台12的前端部两侧分别设置有两个相对称设置的支腿组件5,支撑平台12的后端部两侧分别设置有两个相对称设置的支腿组件5,如此设置,能够有效对支撑平台12起到良好的支撑作用,保证在打印的过程中支撑平台12的水平,支撑结构更为稳固可靠。
[0081]
在一种实施例中,参照附图1和附图2所示,动臂机构3的末端设置有调平机构6,调平机构6包括固定座61、支架62以及调平电机,固定座61固定安装于动臂机构3的末端,支架62与固定座61铰接并用于打印喷头4固定安装,调平电机安装于固定座61并与支架62驱动连接,调平电机用于驱动支架62带动打印喷头4转动,以使打印喷头4保持竖直设置。
[0082]
可以理解地,通过调平机构6对打印喷头4的调平作用,有效保证在打印过程中,不论动臂机构3如何变幅,打印喷头4都能够保持竖直设置,继而保证打印的准确性。
[0083]
在一种实施例中,参照附图2所示,支架62呈u型并包括两个端板62a和中间板62b,两个端板62a相对设置并分别延伸至固定座61的两侧,两个端板62a分别与固定座61铰接,中间板62b两端分别与两个端板62a相连,用于打印喷头4固定安装,如此设置,支架62通过两个端板62a分别与固定座61的两侧铰接,从而具有良好的结构强度。
[0084]
在一种实施例中,参照附图3所示,动臂机构3包括基础臂节31和伸缩臂节32,基础臂节31一端铰接于回转台2并能够相对回转台2转动,伸缩臂节32一端铰接于基础臂节31的另一端并能够相对基础臂节31转动,伸缩臂节32在长度方向上能够伸缩,通过如此,动臂机构3的变幅更为灵活,且能够较大范围的变幅,从而实现大尺寸建筑实体的打印,具有良好的实用性。
[0085]
在本实施例中,具体地,基础臂节31与回转台2之间设有第一变幅油缸,该第一变幅油缸的缸体铰接于回转台2上,该第一变幅油缸的活塞杆铰接于基础臂节31上,如此,通过第一变幅油缸驱动基础臂节31相对于回转台2转动以实现折叠和变幅;进一步地,伸缩臂节32与基础臂节31之间设有第二变幅油缸和连杆机构,连杆机构包括一端分别铰接于基础臂节31的第一连杆和一端铰接于伸缩臂节32的第二连杆,第一连杆的另一端和第二连杆的
另一端相互铰接,第二变幅油缸的缸体铰接于第一连杆和第二连杆的铰接处,第二变幅油缸的活塞杆铰接于伸缩臂节32,如此,通过第二变幅油缸驱动作用和连杆机构的传动作用,实现伸缩臂节32相对于基础臂节31的变幅和折叠。
[0086]
在一种实施例中,参照附图3所示,伸缩臂节32包括相互嵌套的外臂32a和内臂32b,外臂32a一端铰接于基础臂节31的另一端,内臂32b的伸出端能够从外臂32a的另一端伸出或回缩。
[0087]
在本实施例中,具体地,伸缩臂节32的外侧设有第三变幅油缸,第三变幅油缸的缸体铰接于外臂32a,第三变幅油缸的活塞杆铰接于内臂32b,如此,第三变幅油缸能够驱动内臂32b相对于外臂32a沿伸缩臂节32的长度方向滑动,以伸出外臂32a或回缩至外臂32a内,实现变幅和回收。
[0088]
在一种实施例中,参照附图3所示,动臂机构3还包括末端臂节33,末端臂节33的一端铰接于内臂32b的伸出端,内臂32b内部设置有末端臂节伸缩驱动件,末端臂节伸缩驱动件的伸缩端从内臂32b的伸出端伸出并与末端臂节33铰接,用于驱动末端臂节33相对内臂32b转动,通过末端臂节伸缩驱动件的伸缩端的伸缩动作驱动末端臂节33相对内臂32b转动,以实现变幅和折叠,且末端臂节伸缩驱动件设于内臂32b内部,结构紧凑合理。
[0089]
在本实施例中,具体地,末端臂节伸缩驱动件采用油缸。
[0090]
在一种实施例中,3d打印设备还包括打印喷头定位装置和控制器,该打印喷头定位装置用于对打印喷头4的进行定位,具体地,打印喷头定位装置为搭载于动臂机构3上的摄像模组,实现打印作业面复杂环境的3d扫描以进行信息采集和分析,并与控制器通讯连接,控制器根据打印喷头定位装置所采集和分析的信息控制回转机构和动臂机构3动作以使打印喷头4能够按照预期的打印路径移动实现打印。
[0091]
在一种实施例中,3d打印设备还包括供料机构,具体地,供料机构包括供料管和供料仓;供料仓可选择地安装于支撑平台12上随行走机构1行走或独立于行走机构1之外设置,供料管一端与供料仓连通,另一端与打印喷头4连通,从而在3d打印设备的打印过程中,将供料仓内的物料传输至打印喷头4,由打印喷头4喷出物料实现实体的打印。
[0092]
本发明还提出一种3d打印系统,3d打印系统包括控制系统和如上的3d打印设备。该3d打印设备的具体结构参照上述实施例,由于本3d打印系统采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
[0093]
在本实施例中,控制系统用于控制多个3d打印设备同时进行相同或者不同的打印操作,如此,即可实现多个3d打印设备的群组作业。
[0094]
本发明还提出一种基于上述的3d打印设备的3d打印方法,3d打印方法包括:
[0095]
3d打印设备行走至目标打印区域,展开多个支腿组件5并调平支撑平台12;
[0096]
展开动臂机构3,定位并调平打印喷头4的初始位置;
[0097]
根据输入的打印参数控制动臂机构3的变幅动作以控制打印喷头4的移动进行实体的打印。
[0098]
在一种实施例中,3d打印方法还包括:
[0099]
在实体的打印过程中,实时检测实体的尺寸参数并根据所检测到的尺寸参数判断实体是否满足打印要求,若不满足,则暂停打印喷头4的打印并对打印参数进行调整。
[0100]
在一种实施例中,3d打印方法还包括:
[0101]
当实体的打印完成后进入下一个实体的打印时,判断是否在原位置打印,若否,则收回多个支腿组件5并折叠动臂机构3,然后3d打印设备行走至下一个目标打印区域。
[0102]
在实际应用时,参照附图5所示,上述的3d打印设备的打印方法具体包括以下步骤:
[0103]
确定目标打印区域,根据目标打印区域和3d打印设备的初始位置确定行走路径,根据行走路径控制3d打印设备行走至目标打印区域,到位后,展开多个支腿组件5并调平支撑平台12;
[0104]
展开动臂机构3,打印喷头4连接供料机构,定位并调平打印喷头4的初始位置直至打印喷头4的初始位置达到预设位置要求;
[0105]
根据所需打印的三维模型参数确定并输入打印参数,根据输入的打印参数控制动臂机构3的变幅动作以控制打印喷头4的移动进行实体的打印;
[0106]
在实体的打印过程中,实时检测实体的尺寸参数并根据所检测到的尺寸参数与所需打印的三维模型参数进行比较以判断实体是否满足打印要求,若不满足,则暂停打印喷头4的打印并对打印参数进行调整,再根据调整后的参数进行打印,若满足,则继续打印直至实体打印完成;
[0107]
实体打印完成后,判断是否进入下一实体的打印,若否,则打印完成,收回多个支腿组件5并折叠动臂机构3,3d打印设备停机,若是,则再判断是否在原位置打印,若是,则重新定位并调平打印喷头4的初始位置直至打印喷头4的初始位置达到预设位置要求,根据输入的打印参数继续打印下一实体的打印,若否,则确定下一个目标打印区域,根据下一个目标打印区域和3d打印设备的当前位置确定行走路径,收回多个支腿组件5并折叠动臂机构3,根据行走路径控制3d打印设备行走至下一个目标打印区域;
[0108]
到位后,重复上述行走至目标打印区域后的步骤,直至全部实体打印完成,收回多个支腿组件5并折叠动臂机构3,3d打印设备停机或行走至初始位置。
[0109]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0110]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0111]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。