技术特征:
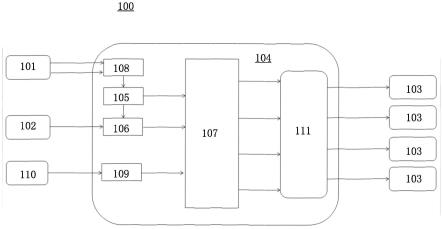
1.一种车身姿态控制系统,包括:陀螺仪传感器,用于获取第一运动信号,所述第一运动信号包括车身在x/y/z轴方向上的加速度和角速度信号;轮端加速度传感器,用于获取第二运动信号,所述第二运动信号包括车轮的加速度信号;多个阻尼减振器,用于控制车身姿态;系统控制器ecu,包括姿态解算模块、悬架状态计算模块和悬架主控算法模块,所述姿态解算模块根据所述第一运动信号获得车身运动状态信息和车身点运动状态信息,所述悬架状态计算模块根据所述第二运动信号和所述车身点运动状态信息以获得悬架运动状态信息,所述悬架主控算法模块根据所述车身运动状态信息和悬架运动状态信息获得期望电流值,所述系统控制器ecu通过所述期望电流值控制多个所述阻尼减振器动作。2.如权利要求1所述的车身姿态控制系统,其特征在于,所述陀螺仪传感器嵌入在所述系统控制器ecu中。3.如权利要求2所述的车身姿态控制系统,其特征在于,所述陀螺仪传感器包括加速度测量芯片和角速度测量芯片,所述加速度测量芯片用于检测车身在x/y/z轴方向上的加速度信号,所述角速度测量芯片用于检测车身在x/y/z轴方向上的角速度信号,所述加速度测量芯片和角速度测量芯片通过spi的主从通讯方式与所述系统控制器ecu通信。4.如权利要求2所述的车身姿态控制系统,其特征在于,所述系统控制器ecu设置在车身的后备箱的左侧支架处。5.如权利要求1所述的车身姿态控制系统,其特征在于,所述轮端加速度传感器设置在所述阻尼减振器的支柱的外筒上。6.如权利要求1所述的车身姿态控制系统,其特征在于,所述系统控制器ecu还包括滤波处理模块,所述滤波处理模块用于对所述第一运动信号进行滤波处理,并将处理结果发送到所述姿态解算模块。7.如权利要求1所述的车身姿态控制系统,其特征在于,所述系统控制器ecu还包括信号预处理模块,所述信号预处理模块与车身的中央控制面板连接,所述信号预处理模块通过所述中央控制面板获取驾驶员控制信号,所述悬架主控算法模块根据所述驾驶员控制信号调整所述期望电流值。8.如权利要求7所述的车身姿态控制系统,其特征在于,所述信号预处理模块通过can总线网络连接到所述中央控制面板。9.如权利要求1所述的车身姿态控制系统,其特征在于,所述车身姿态控制系统还包括电流驱动模块,所述悬架主控算法模块通过所述电流驱动模块来控制多个所述阻尼减振器动作。10.如权利要求1所述的车身姿态控制系统,其特征在于,所述姿态解算模块对所述第一运动信号进行处理,包括:步骤s01,根据所述陀螺仪传感器获得点o的三个方向的角速度信息,通过欧拉角计算处理获得欧拉角信息;步骤s02,根据所述欧拉角信息和所述陀螺仪传感器获得点o的三个方向的加速度信息,通过加速度坐标变换计算得到绝对坐标下的加速度;
步骤s03,对所述加速度进行积分,得到点o在绝对坐标系下的运动速度;步骤s04,所述运动速度经过由绝对坐标系到随动坐标系的坐标变换,得到点o在车身随动坐标系下的速度;步骤s05,结合点r相对于点o的位置信息,所述欧拉角信息和陀螺仪传感器测得的三个方向的角速度信息,根据刚体相对运动速度计算方法,求得点r在车身随动坐标系下的速度;其中,点o为陀螺仪传感器的安装点,点r为车身上任一点。
技术总结
本发明涉及一种车身姿态控制系统。该车身姿态控制系统包括陀螺仪传感器,用于获取第一运动信号,第一运动信号包括车身在X/Y/Z轴方向上的加速度和角速度信号;轮端加速度传感器,用于获取第二运动信号,第二运动信号包括车轮的加速度信号;多个阻尼减振器,用于控制车身姿态;系统控制器ECU,包括姿态解算模块、悬架状态计算模块和悬架主控算法模块,姿态解算模块根据第一运动信号获得车身运动状态信息和车身点运动状态信息,悬架状态计算模块根据第二运动信号和车身点运动状态信息以获得悬架运动状态信息,悬架主控算法模块根据车身运动状态信息和悬架运动状态信息获得期望电流值,系统控制器ECU通过期望电流值控制多个阻尼减振器动作。本发明提出了一种车身姿态控制系统,成本低且能更好地执行车身姿态控制。成本低且能更好地执行车身姿态控制。成本低且能更好地执行车身姿态控制。
技术研发人员:霍飞 张亮修 王胜全 李岭 肖付瑞 李平阳 袁晟哲
受保护的技术使用者:上海保隆汽车科技股份有限公司
技术研发日:2020.12.24
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。