1.本发明涉及一种用于表示车辆周围环境的方法,该车辆具有基于摄像机的周围环境捕捉系统,用于捕捉车辆的周围环境,以便将车辆移动到周围环境中的目标位置。
2.此外,本发明涉及一种用于表示车辆周围环境的驾驶员辅助系统,包括用于捕捉车辆周围环境的基于摄像机的周围环境捕捉系统和接收车辆周围环境图像的处理单元,该驾驶员辅助系统设计成执行前述方法。
背景技术:
3.用于将车辆移动到目标位置的各种辅助功能或者一般的驾驶员辅助系统是已知的。举例来说,这涉及将车辆停放在周围环境的停车位中,停车位代表目标位置。因此,适当的辅助系统可以记录车辆的周围环境,例如以便帮助识别停车位或其他目标位置。此外,这些系统可以帮助确定车辆驾驶员可以遵循的最佳轨迹,以便将车辆停放在停车位中或到达任何期望的目标位置。
4.此外,例如自主或部分自主停车是当前车辆中的重要功能,并已经在这些车辆中的各种驾驶员辅助系统中得到应用且简化停车。在此过程中,相应的车辆被自主或部分自主地操纵到检测到的停车位。这样做,可以允许车辆驾驶员在执行停车过程之前已经离开车辆。举例来说,这种功能是已知的,用于在乘客离开车辆后自主将车辆停放在私人车库或任何私人停车位上。
5.特别是在大都市,停车位通常很少,停车和离开可能很费时间。因此,停车范围内的进一步改进是可取的。
6.为了将车辆移动到目标位置,对于车辆驾驶员来说,可视化关于车辆移动到目标位置的细节通常是有帮助的。这可以增加对车辆自主或部分自主运动的信任,并因此显著提高这些功能的可接受性。具有通常位于车辆内的视觉显示单元的车辆的用户界面用于表示关于车辆向目标位置尤其是向车辆周围环境的停车位的运动的细节。在这种情况下,重要的是车辆驾驶员能够尽可能容易地将细节的表示与他们自己对车辆周围环境的感知进行比较。
7.这里已知各种概念来表示关于车辆到目标位置的运动的细节。例如,可以表示包括关于车辆向目标位置的移动的细节的人工生成的车辆周围环境。为此,通常使用示意性表示,其与车辆驾驶员所感知的真实周围环境几乎没有对应关系。
8.原则上,用真实摄像机图像从鸟瞰视角进行360
°
视图的表示也是已知的。这些表示基于基于摄像机的周围环境捕捉系统,其对周围环境进行360
°
捕捉。举例来说,这种基于摄像机的周围环境捕捉系统包括周围环境视图摄像机系统,其具有附接到车辆的四个摄像机。然而,在此过程中,车辆的真实周围环境会发生失真,使得与真实环境的比较更加困难。原则上,碗视图或自适应碗视图形式的类似表示也是已知的,其部分地减少了这些问题。总的来说,仍需要改进关于车辆移动到目标位置的相关信息的表示。
9.从de10317044a1中已知,机动车驾驶员经常发现在困难的驾驶操作中难以估计他
们的车辆将行驶的轨迹和避免碰撞所需的间隙。当车辆驾驶员不熟悉车辆尺寸或其驾驶行为时尤其如此。在用于监控车辆行驶方向上的间隙的方法的范围内,借助于摄像机系统记录位于行驶方向的区域中的车辆周围环境的图像数据。此外,在信号处理单元内,基于车辆的运行参数和尺寸,预先计算无阻碍运动所需的间隙。由摄像机系统捕捉的与所需间隙相关的至少一些图像数据在显示器上显示给机动车驾驶员。与所需间隙相关的图像数据经受进一步处理,作为该进一步处理的结果,车辆驾驶员被告知是否有足够的间隙可用于无阻碍运动。因此,对图像数据的连续评估使得甚至可以对车辆周围环境的动态变化自动做出反应,并告知车辆驾驶员是否有足够的间隙用于无阻碍运动。
10.de102011082483a1涉及一种用于辅助机动车驾驶员进行驾驶操作的方法,所述方法包括以下步骤:a)记录机动车周围环境的数据,评估用于记录物体和记录物体的光学表示的记录数据,b)由机动车驾驶员选择至少一个记录物体,c)确定机动车和至少一个选择的物体之间的最短距离,以及d)为机动车驾驶员输出关于至少一个选择的物体和机动车之间的最短距离的信息。
11.us2015/0098623a1涉及一种绘制虚拟三维空间的图像处理设备,其中基于由安装在汽车中的摄像机拍摄的图像和由安装在汽车中的测距仪计算的到周围物体上的测量点的距离,重构汽车周围的环境区域。图像处理设备包括:轮廓计算单元,配置为计算在预定坐标系中定义的多个网格平面和外围物体之间的交叉平面的轮廓;以及图像处理单元,配置为在布置在虚拟三维空间中的相应外围物体上绘制由轮廓计算单元计算的轮廓;并且多个网格平面由分别垂直于预定坐标系中的x轴、y轴和z轴的平面构成。
技术实现要素:
12.从前述现有技术出发,本发明因此基于指定一种表示车辆周围环境的方法的目的,该车辆具有基于摄像机的周围环境捕捉系统,用于捕捉车辆周围环境,以便将车辆移动到周围环境中的目标位置,以及相应的驾驶员辅助系统,其便于车辆简单地移动到车辆周围环境中的目标位置。
13.根据本发明,该目的通过独立权利要求的特征来实现。从属权利要求中规定了本发明的有利实施例。
14.根据本发明,因此指定了一种表示车辆周围环境的方法,车辆具有基于摄像机的周围环境捕捉系统,用于捕捉车辆周围环境以将车辆移动到周围环境中的目标位置,该方法包括以下步骤:使用基于摄像机的周围环境捕捉系统提供车辆周围环境的图像,基于由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像,从鸟瞰图生成周围环境图像,确定车辆周围环境中的至少一个目标位置,在覆盖车辆周围环境的第一覆盖平面中表示至少一个目标位置,以及将第一覆盖平面覆盖在周围环境图像上。
15.此外,根据本发明规定了一种用于表示车辆周围环境的驾驶员辅助系统,包括用于捕捉车辆周围环境的基于摄像机的周围环境捕捉系统和接收车辆周围环境图像的处理单元,该驾驶员辅助系统设计为执行上述方法。
16.因此,本发明的基本概念是,通过尽可能直观地实现目标信息(例如车辆周围环境中的目标位置)的表示,使得车辆驾驶员处于能够在短时间内可靠地处理目标信息的位置,来获得车辆向目标位置的移动的改进。为此,本方法有助于一种表示,该表示首先是真实
的,并且与车辆周围环境具有高度的光学对应性,如车辆驾驶员也能感觉到的,并且其次基于与车辆周围环境相关的传感器信息的处理,以第一覆盖平面的形式提供附加信息。结果,通过在鸟瞰图中将来自第一覆盖平面的信息适当地覆盖在周围环境图像上,可以简单地表示附加信息。
17.原则上,车辆可以是任何期望的车辆。为了移动到目标位置,尤其是为了停放车辆,车辆优选地设计成自主或部分自主操纵。这样做,可以允许车辆驾驶员在执行移动到目标位置之前已经离开车辆。
18.驾驶辅助系统提供驾驶员辅助功能或更一般的驾驶辅助功能。举例来说,驾驶员辅助功能可以捕捉车辆的周围环境,以便确定至少一个目标位置,并且可选地确定车辆驾驶员可以遵循的最佳轨迹,以便将车辆移动到目标位置。
19.根据驾驶辅助系统的类型,目标位置可以是例如用于停放车辆的停车位。在代客停车的情况下,目标位置可以是用于将车辆移交给代客的移交点。在其他驾驶辅助系统中,例如车库中的自动停车,目标位置可以由车库来定义。在学习停车的情况下,目标位置可以是独立于指定停车位的任何学习停车位置。这是可能目标位置的示例性、非穷举列表。
20.周围环境涉及车辆周围的区域。这通常意味着在车辆的周围环境传感器的检测范围内的区域,也就是说在车辆周围例如5-50米的半径内的区域,优选地在不超过大约20米的半径内。此外,原则上,通过由周围环境传感器预先接收和存储的传感器信息,该范围可以扩展到此之外。
21.车辆周围环境的表示包括通过车辆中的图形用户界面的信息输出,例如具有视觉显示单元,优选地具有触敏视觉显示单元,以额外地接收来自车辆驾驶员的输入。
22.基于摄像机的周围环境捕捉系统有助于360
°
捕捉周围环境。举例来说,这种基于摄像机的周围环境捕捉系统包括周围环境视图摄像机系统,其具有附接到车辆的四个摄像机,也就是说车辆的每一侧都具有附接至其的一个摄像机。摄像机优选为广角摄像机,其孔径角约为170-180
°
。这四个摄像机可以分别提供四个图像,这些图像一起完全覆盖车辆的周围环境,也就是说有利于360
°
视图。因此,来自基于摄像机的周围环境捕捉系统的车辆周围环境的图像最初被提供为多个单独的图像。
23.因此,鸟瞰图周围环境图像的生成通常包括对由基于摄像机的周围环境捕捉系统一起提供的多个单独图像的处理。图像被适当地处理和/或组合,以便生成360
°
视图。
24.可以不同的方式确定车辆周围环境中的至少一个目标位置。为此,可以直接处理传感器信息,以便确定至少一个目标位置。可替代地或另外,例如,可以首先基于传感器信息生成周围环境地图,然后基于其确定至少一个目标位置。举例来说,目标位置的确定可以包括基于线标记、交通标志或其他标识符的停车位的识别、到泊车员的移交点的识别或车库的识别。
25.在第一覆盖平面中表示至少一个目标位置涉及车辆运动的目标位置的表示。目标位置优选地由完全或部分围绕目标位置的边界线来表示。原则上,目标位置也可以由不同颜色的区域表示,或者由具有应该移动到目标位置的自身车辆的轮廓的轮廓线表示。目标位置可以是精确的位置,或者例如定义车辆移动进入的窗口。因此,第一覆盖平面中的相应目标位置的表示可以完全不同的方式实现。
26.通过将第一覆盖平面覆盖在周围环境图像上,存在由车辆驾驶员感知的周围环境
图像和目标信息的组合表示,目标信息在这种情况下表示车辆周围环境中的目标位置。在这种情况下,覆盖意味着周围环境图像的可用部分被覆盖平面替换或补充,例如通过部分透明的覆盖。在这种情况下,覆盖图像没有必要完全填充图像区域;例如,当周围环境的部分被障碍物遮挡时,这也是不可能的。周围环境图像也可以仅用来自第一覆盖平面的图像信息补充。
27.在本发明的有利实施例中,该方法包括以下附加步骤:在车辆周围环境中建立不可驾驶区域,在覆盖车辆周围环境的第二覆盖平面中表示不可驾驶区域,以及将第二覆盖平面覆盖在周围环境图像上。不可驾驶区域可以直接建立,或者可以首先建立可驾驶区域,并且通过反转可驾驶区域来建立不可驾驶区域。第二覆盖平面表示第一覆盖平面的附加覆盖平面,覆盖平面原则上能够以任何顺序用于最初覆盖在周围环境图像上,并且可选地覆盖在相应的另一覆盖平面上。上面给出的关于被第一覆盖平面覆盖的周围环境图像的解释相应地适用。
28.在本发明的有利实施例中,不可驾驶区域在覆盖车辆周围环境的第二覆盖平面中的表示包括基于由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像以侧视图生成不可驾驶区域的表示。这样的侧视图对应于例如在自适应碗视图中使用的表示。侧视图有助于周围环境图像中周围环境的高识别值。这里,侧视图优选无失真地或者至少以减少的失真生成,为此,对来自基于摄像机的周围环境捕捉系统的图像进行适当的图像处理。
29.在本发明的有利实施例中,该方法包括以下附加步骤:在车辆周围环境中建立至少一个障碍物,在覆盖车辆周围环境的第三覆盖平面中表示至少一个障碍物,以及将第三覆盖平面覆盖在周围环境图像上。至少一个障碍物可以直接基于传感器信息来确定。可替代地或另外,例如,可以基于传感器信息生成周围环境地图,并且所述周围环境地图用作建立至少一个障碍物的基础。第三覆盖平面表示第一覆盖平面和可选的第二覆盖平面的附加覆盖平面,覆盖平面原则上能够以任何顺序用于最初覆盖在周围环境图像和可选的其他覆盖平面上。上面给出的关于被第一覆盖平面覆盖的周围环境图像的解释相应地适用。
30.在本发明的有利实施例中,至少一个障碍物在第三覆盖平面中的表示包括至少一个障碍的边界的表示。至少一个障碍物优选地由边界线表示,该边界线完全或部分地围绕该至少一个障碍物。原则上,至少一个障碍物也可以由不同颜色的区域表示,或者以不同方式表示。
31.在本发明的有利实施例中,该方法包括用于识别至少一个障碍物的步骤,并且至少一个障碍物在覆盖车辆周围环境的第三覆盖平面中的表示包括基于至少一个障碍物的识别的至少一个障碍物的表示。至少一个障碍物的识别涉及分类,例如为了识别第三方车辆、树木、人、建筑物、垃圾桶或其他障碍物。在此基础上,可以根据相应的类别选择障碍物的表示。也就是说,基于该识别来选择至少一个障碍物的占位符的类型,并将其表示在第三覆盖平面中。在这种情况下,优选地,在与周围图像的表示相对应的俯视图中表示障碍物。可替代地,障碍物可以用侧视图示出。
32.在本发明的有利实施例中,至少一个障碍物在覆盖车辆周围环境的第三覆盖平面中的表示包括提供至少一个障碍物的摄像机图像。摄像机图像有助于至少一个障碍物的特别逼真的表示,由此有助于将表示简单地分配给车辆驾驶员所感知的周围环境。在这种情况下,摄像机图像优选地在与周围图像的表示相对应的俯视图中生成,或者摄像机图像被
投影到俯视图中。
33.在本发明的有利实施例中,至少一个障碍物在覆盖车辆周围环境的第三覆盖平面中的表示包括至少一个障碍物的依赖于距离的表示。特别地,依赖于距离的表示包括取决于距离的不同颜色的障碍物或障碍物区域的表示。因此,例如可以使用红色来表示近障碍物,而例如可以使用绿色或使用黑色或灰色来表示远障碍物。这种表示特别适用于周围环境传感器不再主动记录的区域。这可以向用户指示该区域先前被一个周围环境传感器记录过,但不再有主动记录。此外,例如,障碍物的近区域可以使用与障碍物的远区域不同的颜色来表示。除了一致颜色之外,它们还可以是具有颜色渐变或彩色图案的彩色表示。
34.在本发明的有利实施例中,至少一个障碍物在覆盖车辆周围环境的第三覆盖平面中的表示包括基于由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像以侧视图生成至少一个障碍物的表示。这样的侧视图对应于例如在自适应碗视图中使用的表示。侧视图有助于周围环境图像中障碍物的高识别值。这里,侧视图优选地在没有失真或失真减少的情况下生成,为此,需要对来自基于摄像机的周围环境捕捉系统的图像进行适当的图像处理。
35.在本发明的有利实施例中,在考虑由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像的情况下,实现车辆周围环境中至少一个目标位置的确定和/或车辆周围环境中不可驾驶区域的确定和/或车辆周围环境中至少一个障碍物的建立。因此,基于摄像机的周围环境捕捉系统充当用于监控车辆周围环境的周围环境传感器。原则上,不再需要其他周围环境传感器,但它们可以用于改善监控。
36.在本发明的有利实施例中,该方法包括从至少一个另外周围环境传感器接收传感器信息的步骤,该传感器特别是基于激光雷达的周围环境传感器、雷达传感器或多个超声波传感器,其记录车辆周围环境的至少一部分,并且在考虑至少一个另外周围环境传感器的传感器信息的情况下,执行车辆周围环境中至少一个目标位置的确定和/或车辆周围环境中不可行驶区域的确定和/或车辆周围环境中至少一个障碍物的建立。通过适当选择可以任意组合和数量附接在车辆上的周围环境传感器,因此有助于车辆周围环境的特别可靠的记录,以便确定或记录目标位置、不可驾驶区域和/或至少一个障碍物。在这种情况下,基于摄像机的周围环境捕捉系统可以提供附加传感器信息,其与至少一个另外周围环境传感器的传感器信息一起被处理,以便确定或记录至少一个目标位置、不可驾驶区域和/或至少一个障碍物。可替代地,仅使用来自至少一个另外周围环境传感器的传感器信息。当使用多个相似和/或不同的周围环境传感器时,可以融合来自周围环境传感器的传感器信息。
37.在本发明的有利实施例中,基于由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像从鸟瞰图生成周围环境图像包括碗视图类型的周围环境图像的生成。这是一个碗形式的特殊视图,其中边缘被向上拉。与鸟瞰图的表示相反,边缘因此可以在侧视图中部分表示。与纯俯视图或鸟瞰图相比,这改善了车辆驾驶员所感知的与周围环境的一致性,尤其是在远处。
38.在本发明的有利实施例中,至少一个目标位置在覆盖车辆周围环境的第一覆盖平面中的表示包括用于移动车辆以到达目标位置的轨迹的表示。轨迹允许到达目标位置的运动被很好地估计。特别地,已经可以预先检查车辆是否能够移动到目标位置。轨迹可以包括驱动方向反转的多次移动。
39.在本发明的有利实施例中,用于移动车辆到达目标位置的轨迹的表示包括当沿着轨迹行驶时车辆经过的区域的表示。根据可驾驶区域,因此可以容易地确定是否存在离开可驾驶区域的风险。当沿着轨迹行驶时,车辆经过的区域优选地基于包括驾驶辅助系统的相应车辆的尺寸来表示。可替代地,可以使用传统车辆的平均值或最大值作为车辆的相应尺寸。
40.可替代地或另外,可以表示附加目标信息,例如沿轨迹的停止点、沿轨迹行驶时的速度曲线,其中当前速度优选地通过不同颜色来编码、在轨迹上行驶时的进入限制(车库门、花园门、(可降低的)安全岛护柱、栏杆)的启动等。
41.在本发明的有利实施例中,该方法包括用于存储由基于摄像机的周围环境捕捉系统提供的车辆周围环境的图像的步骤,并且鸟瞰图中周围环境图像的生成包括基于由基于摄像机的周围环境捕捉系统当前提供的车辆周围环境的图像生成周围环境图像的至少一个第一区域和具有车辆周围环境的存储图像的至少一个第二区域。因此,相对于仅使用当前图像,有可能覆盖车辆周围的更大区域,自然需要考虑存储图像的当前性。车辆周围环境中的至少一个目标位置的确定同样可以基于由基于摄像机的周围环境捕捉系统提供的车辆周围环境的当前图像结合存储的图像来执行。相应的陈述适用于周围环境中障碍物的建立。在这种情况下,周围环境图像可以具有至少一个第一区域和至少一个第二区域的不同表示,以便指示从存储图像开始的第二区域变化的潜在风险。举例来说,第一和第二区域可被不同地染色(红色、灰色)。
42.下面参照附图并基于优选实施例更详细地解释本发明。图示的特征可以单独或组合地代表本发明的一方面。不同示例性实施例的特征可以在各个示例性实施例间转移。
附图说明
43.在附图中:
44.图1以侧视图示出了具有根据第一优选实施例的驾驶辅助系统的车辆的示意图;
45.图2示出了对应于第一实施例的具有车辆周围环境的车辆的第一示例性描述,
46.图3示出了对应于第二实施例的具有车辆周围环境的车辆的第二示例性描述,
47.图4示出了对应于第三实施例的具有车辆周围环境的车辆的第三示例性描述,
48.图5示出了具有碗视图形式的车辆周围环境且对应于第四实施例的车辆的第四示例性描述;
49.图6示出了具有自适应碗视图形式的车辆周围环境且对应于第五实施例的车辆的第五示例性描述;以及
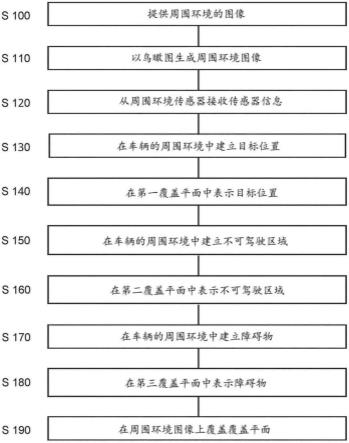
50.图7示出了对应于第一示例性实施例的车辆和驾驶辅助系统的用于表示图1的车辆周围环境的方法的流程图。
具体实施方式
51.图1示出了具有根据第一优选实施例的驾驶辅助系统12的车辆10。原则上,车辆10是任何车辆10,其优选设计用于自主或部分自主操纵,例如用于停放车辆10。在自主驾驶的情况下,在执行相应的停车过程之前,允许车辆驾驶员已经离开车辆10。
52.驾驶员辅助系统12包括基于摄像机的周围环境捕捉系统14,其执行车辆10的周围
环境16的360
°
捕捉。在该示例性实施例中,基于摄像机的周围环境捕捉系统14(为了简单起见,在此呈现为单独的设备)包括四个单独的周围环境视图摄像机,这些摄像机在图中没有单独示出并且附接到车辆10。详细地,四个摄像机之一附接到车辆10的每一侧。四个摄像机优选地是广角摄像机,其孔径角大约为170-180
°
。四个摄像机分别提供四个图像,这些图像一起完全覆盖车辆10的周围环境16,也就是说便于360
°
观察。
53.驾驶辅助系统12还包括处理单元18,其通过数据总线20从基于摄像机的环境捕捉系统14接收图像。
54.此外,驾驶辅助系统12包括周围环境传感器22,其在该示例性实施例中是雷达传感器或基于激光雷达的传感器的形式。周围环境传感器22经由数据总线20将与车辆10的周围环境16相关的传感器信息传输到处理单元18。在替代实施例中,周围环境传感器22设计为具有多个单独的超声波传感器的超声波传感器单元。
55.驾驶辅助系统12表示驾驶员辅助功能或者一般地说是驾驶辅助功能,其中记录车辆10的周围环境16,以便辅助确定目标位置24,并且可选地确定车辆驾驶员为了将车辆10移动到目标位置24可以遵循的最佳轨迹。
56.因此,驾驶辅助系统12在该示例性实施例中设计成执行表示车辆10的周围环境16的方法,以便将车辆10移动到周围环境16中的目标位置24。该方法在图7中被再现为流程图并在下面另外参考图2至6进行描述。图2至6表示车辆10的周围环境16的不同表示,这些表示都可以由相同的驾驶辅助系统12生成。表示的改变仅仅需要驾驶辅助系统12的改变的配置或编程。第一示例性实施例中的驾驶辅助系统12设计用于车辆10的自主停车。
57.因此,该示例性实施例中的目标位置24是用于停放车辆10的停车位24。
58.该方法从步骤s100开始,该步骤包括通过基于摄像机的周围环境捕捉系统14提供车辆10的周围环境16的图像。四个单独的图像分别通过数据总线20一起传输到驾驶辅助系统12的处理单元18。
59.步骤s110涉及基于由基于摄像机的周围环境捕捉系统14提供的车辆10的周围环境16的图像,从鸟瞰图生成周围环境图像26。因此,周围环境图像26是通过处理由基于摄像机的周围环境捕捉系统14一起提供的各个图像而生成的。各个图像被适当地处理和/或组合,以便生成360
°
视图。在鸟瞰图中具有周围环境图像26的相应表示在图2至4中示出。
60.在图5所示的替代第四实施例中,周围环境图像26以碗视图的形式生成。碗视图涉及碗形式的特殊视图,其中边缘被向上拉,使得与鸟瞰图中的表示相反,边缘至少部分地以侧视图表示。因此,周围环境图像26的表示以碗视图形式实现。
61.在图6所示的替代第五实施例中,以自适应碗视图形式生成周围环境图像26。
62.步骤s120涉及从周围环境传感器22接收传感器信息,该传感器记录车辆10的周围环境16的至少一部分。周围环境传感器22的传感器信息经由数据总线20被传送到处理单元18。
63.步骤s130涉及确定车辆10的周围环境16中的至少一个目标位置24。在该示例性实施例中,确定至少一个目标位置24涉及将停车位建立为目标位置24。在该示例性实施例中,在考虑来自周围环境传感器22的传感器信息以及来自基于摄像机的周围环境捕捉系统14的传感器信息,即由基于摄像机的周围环境捕捉系统14提供的图像的情况下,确定至少一个目标位置24。来自周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息
被一起处理,以便记录至少一个停车位24。在该过程中,实现周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息的融合,这本身是可选的。
64.车辆10的周围环境16中的至少一个停车位24可以不同的方式建立。为此,来自周围环境传感器22的传感器信息可以与来自基于摄像机的周围环境捕捉系统14的传感器信息一起被直接处理,以便确定至少一个停车位24。可替代地或另外,可以基于传感器信息生成周围环境地图,并且所述周围环境地图用作建立停车位24的基础。
65.步骤s140涉及至少一个目标位置24即至少一个停车位24在第一覆盖平面中的表示,该第一覆盖平面覆盖车辆10的周围环境16。在第一覆盖平面中表示至少一个停车位24涉及用于停放车辆10的停车位24的表示。在该示例性实施例中,停车位24由边界线表示,该边界线完全包围停车位24。可替代地或另外,停车位24可以由不同颜色的区域表示。
66.步骤s150涉及在车辆10的周围环境16中建立不可驾驶区域30。不可驾驶区域30可以直接建立,或者可以首先建立可驾驶区域28,并且通过反转可驾驶区域28来建立不可驾驶区域30。
67.车辆10的周围环境16中的不可驾驶区域30也是在考虑来自周围环境传感器22的传感器信息以及来自基于摄像机的周围环境捕捉系统14的传感器信息(即由基于摄像机的周围环境捕捉系统14提供的图像)的情况下建立的。来自周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息被一起处理,以便记录不可驾驶区域30。在该过程中,实现周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息的融合,这本身是可选的。
68.车辆10的周围环境16中的不可驾驶区域30可以不同的方式建立。为此,来自周围环境传感器22的传感器信息可以与来自基于摄像机的周围环境捕捉系统14的传感器信息一起被直接处理,以便确定不可驾驶区域30。可替代地或另外,可以基于传感器信息生成周围环境地图,并且所述周围环境地图用作建立不可驾驶区域30的基础。
69.步骤s160涉及在覆盖车辆10的周围环境16的第二覆盖平面中的不可驾驶区域30的表示。第二覆盖平面表示第一覆盖平面的附加覆盖平面。在图2至4的图示中,不可驾驶区域30由具有给定颜色的均匀区域标记,使得周围环境图像26被不可驾驶区域30中的该区域覆盖,并且不能被感知。
70.在第四或第五实施例中,相应地如图5和6所示,生成基于由基于摄像机的周围环境捕捉系统14提供的车辆10的周围环境16的图像的侧视图,用于表示不可驾驶区域30。在这种情况下,侧视图优选地动态生成并连续调整。这种侧视图对应于例如在如图5所示的碗视图或如图6所示的自适应碗视图中使用的表示。在自适应碗视图中,侧视图以减少的失真生成,为此,对来自基于摄像机的周围环境捕捉系统14的图像进行适当的图像处理。
71.步骤s170涉及在车辆10的周围环境16中建立至少一个障碍物32。
72.车辆10的周围环境16中的至少一个障碍物32也是在考虑来自周围环境传感器22的传感器信息以及来自基于摄像机的周围环境捕捉系统14的传感器信息(即由基于摄像机的周围环境捕捉系统14提供的图像)的情况下确定的。来自周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息被一起处理,以便记录至少一个障碍物32。在该过程中,实现周围环境传感器22和基于摄像机的周围环境捕捉系统14的传感器信息的融合,这本身是可选的。
73.至少一个障碍物32可以直接基于来自周围环境传感器22的传感器信息以及基于摄像机的周围环境捕捉系统14来建立。可替代地或另外,可以基于传感器信息生成周围环境地图,并且所述周围环境地图用作建立至少一个障碍物32的基础。
74.步骤s180涉及在覆盖车辆10的周围环境16的第三覆盖平面中的至少一个障碍物32的表示。
75.在图2所示的第一示例性实施例中,第三覆盖平面中的至少一个障碍32的表示包括至少一个障碍物32的边界线的表示。在该示例性实施例中,边界线仅标记障碍物32面向车辆10的侧面。可替代地或另外,障碍物32可以由不同颜色的区域表示。在这种情况下,以图2中未示出的方式,存在具有依赖于距离的不同颜色的障碍物32的依赖于距离的表示。在该示例性实施例中,例如,障碍物32的近区域使用红色表示,而障碍物32的远区域使用绿色或使用黑色或灰色表示。这种表示特别适用于周围环境传感器不再主动记录的区域。这可以向用户指示该区域先前被一个周围环境传感器记录过,但不再有主动记录。
76.在图3所示的第二示例性实施例中,首先执行识别至少一个障碍物32的步骤。这包括障碍物32的分类,例如为了识别第三方车辆、树木、人、建筑物、垃圾桶或其他障碍物32。在这里所示的示例性实施例中,障碍物32是第三方车辆。
77.基于该识别,与在第三覆盖平面中使用的相应类别相对应地选择障碍物32的表示。在该示例性实施例中,障碍物32在俯视图中表示为与周围环境图像26的表示相对应。可替代地,障碍物32可以用侧视图表示。相应地,至少一个障碍物32基于该识别来表示。
78.在图4所示的第三示例性实施例中,至少一个障碍物32在第三覆盖平面中的表示包括提供至少一个障碍物32的摄像机图像,如基于摄像机的周围环境捕捉系统14所记录。结果,生成了至少一个障碍物32的逼真表示。在这种情况下,摄像机图像优选地在与周围环境图像26的表示相对应的俯视图中生成,或者摄像机图像被投影到俯视图中。可替代地,基于由基于摄像机的周围环境捕捉系统14提供的车辆10的周围环境16的图像,以侧视图生成至少一个障碍物32的摄像机图像。因此,至少一个障碍物32以例如在自适应碗视图的情况下使用的表示形式被可视化。侧视图优选地在没有失真或失真减少的情况下生成,为此,对来自基于摄像机的周围环境捕捉系统14的图像进行适当的图像处理。
79.步骤s190涉及用第一、第二和第三覆盖平面覆盖周围环境图像26。在覆盖的范围内,周围环境图像26的可用部分由覆盖平面的信息放置或补充,例如通过部分透明的覆盖。在这种情况下,周围环境图像26没有必要完全填充图像区域。在这种情况下,周围环境图像26仅由覆盖平面的图像信息补充。在这种情况下,覆盖平面原则上可以任何顺序布置,并且可能彼此覆盖。因此,覆盖的周围环境图像26可以通过车辆10的用户界面输出,并显示给车辆驾驶员。
80.通过将覆盖平面覆盖在周围环境图像26上,存在由车辆驾驶员感知的周围环境16的组合表示以及停车信息,在这种情况下,停车信息涉及停车位24在车辆10的周围环境16中的位置。
81.附图标记列表
82.10 车辆
83.12 驾驶辅助系统
84.14 基于摄像机的周围环境捕捉系统
85.16 周围环境
86.18 处理单元
87.20 数据总线
88.22 周围环境传感器
89.24 目标位置、停车位
90.26 周围环境图像
91.28 可驾驶区域
92.30 不可驾驶区域
93.32 障碍物
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
