1.本实用新型涉及番茄酱加工技术领域,特别涉及一种可快速回收物料的番茄酱生产用杀菌装置。
背景技术:
2.微生物是导致食品变质的原因,其中细菌是主要原因,为了有效防止番茄酱的腐败变质,在番茄酱的生产加工过程中,要对其进行杀菌以保证产品质量,并确保不会在储存期内变质,每种微生物的生长繁殖都需要适当的温度范围,当温度高于微生物最合适的生长温度时,微生物的生长就会受到抑制,而温度高到足以使微生物细胞蛋白质受热凝固而失去新陈代谢的能力时,微生物就会死亡。
3.在番茄酱高温杀菌完毕后需要将番茄酱快速回收至新的容器内部进行转运,以便后续加工,但是现有技术中需要人工手动完成回收,操作速度慢,自动化程度低,降低了番茄酱整体的加工效率。
技术实现要素:
4.本实用新型针对以上问题,提出一种可快速回收物料的番茄酱生产用杀菌装置来解决上述问题。
5.本实用新型是这样实现的,一种可快速回收物料的番茄酱生产用杀菌装置,包括:
6.第一传送带,所述第一传送带的外壁安装有用于驱动第一传送带的驱动电机,所述第一传送带的上端面左侧设置有高温杀菌设备,所述第一传送带的上端面还设置有盛装筒;
7.第二传送带,所述第二传送带位于第一传送带的右侧,所述第二传送带的上端面设置有回收筒,所述回收筒的上端面可拆卸连接有盖体,所述盖体的上端面固定连接有承接漏斗。
8.为了便于将盛装筒内部的番茄酱导入回收筒内部,作为本实用新型的一种可快速回收物料的番茄酱生产用杀菌装置优选的,所述盛装筒的右侧壁连通有开口向下且为直角结构的排出管,所述排出管的外壁从左到右依次设置有抽泵和阀门。
9.为了便于将盛装筒精准定位,作为本实用新型的一种可快速回收物料的番茄酱生产用杀菌装置优选的,所述第一传送带的上端面右侧固定连接有限位板,所述限位板的左侧壁安装有红外发射器,所述盛装筒的右侧壁安装有与红外发射器相匹配的红外接收器。
10.为了便于检测盛装筒内部番茄酱是否完全排出,作为本实用新型的一种可快速回收物料的番茄酱生产用杀菌装置优选的,所述盛装筒的内部底端设置有称重传感器。
11.为了便于操作盒控制设备,提高自动化程度,作为本实用新型的一种可快速回收物料的番茄酱生产用杀菌装置优选的,所述第一传送带的前端面安装有控制面板,所述控制面板的内部设置有控制器,所述驱动电机、抽泵、阀门、红外发射器、红外接收器和称重传感器均与控制器电性连接。
12.为了便于将盛装筒内部番茄酱完全排出,作为本实用新型的一种可快速回收物料的番茄酱生产用杀菌装置优选的,所述盛装筒的内部设置有与排出管连通且延伸至盛装筒内部底端的管道。
13.与现有技术相比,本实用新型的有益效果是:
14.第一传送带用于传送带动装有番茄酱的盛装筒,盛装筒被导入高温杀菌设备的内部进行高温杀菌,第二传送带用于传送回收筒,回收筒便于承接杀菌完毕的番茄酱,便于将番茄酱传送至下一步加工区域,通过设置盖体,在回收番茄酱的过程中避免灰尘和杂物进入回收筒内部,承接漏斗位于排出管的正下方,便于承接番茄酱;
15.当番茄酱杀菌完毕后第一传送带带动盛装筒向右移动,盛装筒缓慢接近限位板,此时红外接收器接收红外发射器发出的信号,从而便于检测盛装筒与限位板之间的距离,当二者之间的距离到达设定距离时,红外接收器将信号传递至控制面板内部的控制器,控制器控制驱动电机停止工作,从而使第一传送带停止传送,从而实现自动化控制第一传送带的启停,当第一传送带停止后,控制器同时控制抽泵和阀门均打开,抽泵将盛装筒内部的番茄酱抽出并且通过排出管导入底部的承接漏斗内部,番茄酱再沿着承接漏斗进入底部回收筒内部进行回收,回收速度快且无需人工干涉,设备自动化程度高,有效提高加工效率,称重传感器可以实时检测盛装筒内部的番茄酱的重量,当盛装筒内部的番茄酱被回收完毕后内部重量下降,重量值到达设定好的值时,称重传感器将信号传递至控制器,控制器进一步控制抽泵和阀门均关闭,从而完成番茄酱的快速回收。
附图说明
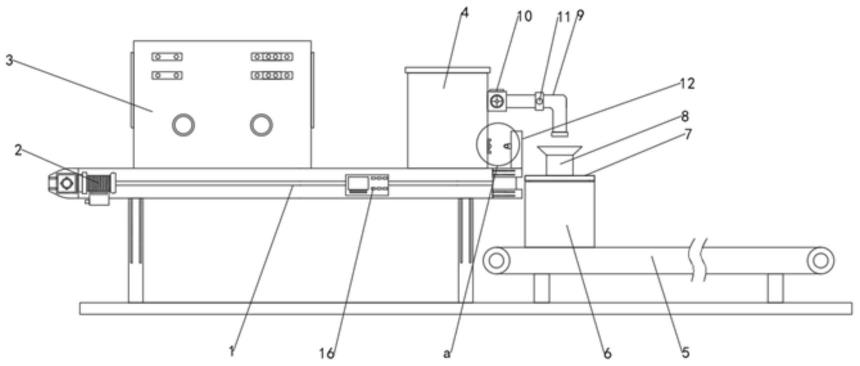
16.图1为本实用新型整体结构示意图;
17.图2为本实用新型盛装筒内部结构图;
18.图3为本实用新型a部放大结构图;
19.图中,1、第一传送带;2、驱动电机;3、高温杀菌设备;4、盛装筒;5、第二传送带;6、回收筒;7、盖体;8、承接漏斗;9、排出管;10、抽泵;11、阀门;12、限位板;13、红外发射器;14、红外接收器;15、称重传感器;16、控制面板。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
22.请参阅图1-3,一种可快速回收物料的番茄酱生产用杀菌装置,包括:
23.第一传送带1,第一传送带1的外壁安装有用于驱动第一传送带1的驱动电机2,第
一传送带1的上端面左侧设置有高温杀菌设备3,第一传送带1的上端面还设置有盛装筒4;
24.第二传送带5,第二传送带5位于第一传送带1的右侧,第二传送带5的上端面设置有回收筒6,回收筒6的上端面可拆卸连接有盖体7,盖体7的上端面固定连接有承接漏斗8。
25.本实施例中:第一传送带1用于传送带动装有番茄酱的盛装筒4,盛装筒4被导入高温杀菌设备3的内部进行高温杀菌,第二传送带5用于传送回收筒6,回收筒6便于承接杀菌完毕的番茄酱,便于将番茄酱传送至下一步加工区域,通过设置盖体7,在回收番茄酱的过程中避免灰尘和杂物进入回收筒6内部,承接漏斗8位于排出管9的正下方,便于承接番茄酱。
26.作为本实用新型的一种技术优化方案,盛装筒4的右侧壁连通有开口向下且为直角结构的排出管9,排出管9的外壁从左到右依次设置有抽泵10和阀门11。
27.本实施例中:当第一传送带1停止后,控制器同时控制抽泵10和阀门11均打开,抽泵10将盛装筒4内部的番茄酱抽出并且通过排出管9导入底部的承接漏斗8内部,番茄酱再沿着承接漏斗8进入底部回收筒6内部进行回收,回收速度快且无需人工干涉,设备自动化程度高,有效提高加工效率。
28.作为本实用新型的一种技术优化方案,第一传送带1的上端面右侧固定连接有限位板12,限位板12的左侧壁安装有红外发射器13,盛装筒4的右侧壁安装有与红外发射器13相匹配的红外接收器14。
29.本实施例中:当番茄酱杀菌完毕后第一传送带1带动盛装筒4向右移动,盛装筒4缓慢接近限位板12,此时红外接收器14接收红外发射器13发出的信号,从而便于检测盛装筒4与限位板12之间的距离,当二者之间的距离到达设定距离时,红外接收器14将信号传递至控制面板16内部的控制器,控制器进一步控制驱动电机2停止工作,从而使第一传送带1停止传送,从而实现自动化控制第一传送带1的启停。
30.作为本实用新型的一种技术优化方案,盛装筒4的内部底端设置有称重传感器15。
31.本实施例中:称重传感器15可以实时检测盛装筒4内部的番茄酱的重量,当盛装筒4内部的番茄酱被回收完毕后内部重量下降,重量值到达设定好的值时,称重传感器15将信号传递至控制器,控制器进一步控制抽泵10和阀门11均关闭,从而完成番茄酱的快速回收。
32.作为本实用新型的一种技术优化方案,第一传送带1的前端面安装有控制面板16,控制面板16的内部设置有控制器,驱动电机2、抽泵10、阀门11、红外发射器13、红外接收器14和称重传感器15均与控制器电性连接。
33.本实施例中:驱动电机2、抽泵10、阀门11、红外发射器13、红外接收器14和称重传感器15均与控制器电性连接,便于实现番茄酱的自动回收工作,自动化程度高,操作控制方便。
34.作为本实用新型的一种技术优化方案,盛装筒4的内部设置有与排出管9连通且延伸至盛装筒4内部底端的管道。
35.本实施例中:盛装筒4的内部设置有与排出管9连通且延伸至盛装筒4内部底端的管道,从而方便将盛装筒4内部的番茄酱全部导入回收筒6内部。
36.本实用新型的工作原理及使用流程:第一传送带1用于传送带动装有番茄酱的盛装筒4,盛装筒4被导入高温杀菌设备3的内部进行高温杀菌,第二传送带5用于传送回收筒6,回收筒6便于承接杀菌完毕的番茄酱,便于将番茄酱传送至下一步加工区域,通过设置盖
体7,在回收番茄酱的过程中避免灰尘和杂物进入回收筒6内部,承接漏斗8位于排出管9的正下方,便于承接番茄酱,当番茄酱杀菌完毕后第一传送带1带动盛装筒4向右移动,盛装筒4缓慢接近限位板12,此时红外接收器14接收红外发射器13发出的信号,从而便于检测盛装筒4与限位板12之间的距离,当二者之间的距离到达设定距离时,红外接收器14将信号传递至控制面板16内部的控制器,控制器控制驱动电机2停止工作,使第一传送带1停止传送,从而实现自动化控制第一传送带1的启停,当第一传送带1停止后,控制器同时控制抽泵10和阀门11均打开,抽泵10将盛装筒4内部的番茄酱抽出并且通过排出管9导入底部的承接漏斗8内部,番茄酱再沿着承接漏斗8进入底部回收筒6内部进行回收,回收速度快且无需人工干涉,设备自动化程度高,有效提高加工效率,称重传感器15可以实时检测盛装筒4内部的番茄酱的重量,当盛装筒4内部的番茄酱被回收完毕后内部重量下降,重量值到达设定好的值时,称重传感器15将信号传递至控制器,控制器进一步控制抽泵10和阀门11均关闭,从而完成番茄酱的快速回收。
37.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。