1.本实用新型涉及一种定位堆垛装置,具体是一种基于机械臂利用接近开关定位拆垛的装置。
背景技术:
2.随着智能制造的来临,工厂智能化已成为不可逆的发展趋势,机械臂作为自动化技术升级重要的核心组成部分,无疑成为业界关注的重点之一。凭借其优越的灵活性,坚固耐用,运转灵活等特点,机器人获得了越来越多的应用。
3.目前来看,实现自动化生产的一个重要技术方向是利用机器人来实现物料的拆垛,从而实现自动上下料,随着企业的柔性化生产的需要,物料的种类越来越多,但是当前机械臂末端夹具一般只有个别几个型号,为所有的物料配备专用夹具的成本过高。
技术实现要素:
4.本实用新型的目的在于提供一种基于机械臂利用接近开关定位拆垛的装置;利用装在机械臂末端夹爪的接近开关或激光测距传感器,结合机械臂的中断功能,机械臂按照程序固定路线巡检,当接近开关触发时,启用机械臂的中断程序,终止巡检程序,并把当前位置反馈给机械臂控制器,机械臂控制器获得当前位置后,加上料棒的直径作为偏移值,从而获得要抓取的料棒的位置,移动机器人到达此位置,启动夹爪,实现对不同直径棒料的智能抓取;装置能精准的对物料进行抓取拆垛,降低劳动强度,提高劳动效率设置至少两个接触开关或激光测距传感器有效的对具有一定长度的物料摆放方向进行定位,能够抓取不同摆放角度的物料,实现了智能化抓取物料,减小了工作强度,降低了维护成本。
5.本实用新型的目的可以通过以下技术方案实现:
6.一种基于机械臂利用接近开关定位拆垛的装置,包括固定架,所述固定架上设有对称分布的伸缩缸,固定架上转动设有对称分布的转动件,转动件上设有阵列分布的夹爪,两侧的夹爪的端部均设置有接触开关。
7.进一步地,所述固定架上设有对称分布的液压缸,液压缸的输出轴紧固连接有限位杆。
8.进一步地,对称分布的液压缸之间设有连接板,连接板上设有对称分布的激光测距传感器。
9.进一步地,所述转动件包括支撑轴,支撑轴与固定架转动连接,支撑轴上设有连杆,连杆与伸缩缸的输出轴滑动连接,支撑轴上设有支撑架。
10.进一步地,所述夹爪与支撑架通过可拆卸方式连接。
11.本实用新型的有益效果:
12.本实用新型能精准的对物料进行抓取拆垛,降低劳动强度,提高劳动效率设置至少两个接触开关或激光测距传感器有效的对具有一定长度的物料摆放方向进行定位,能够抓取不同摆放角度的物料,实现了智能化抓取物料,减小了工作强度,降低了维护成本。
附图说明
13.下面结合附图对本实用新型作进一步的说明。
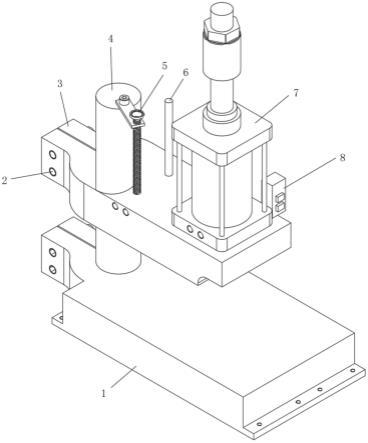
14.图1是本实用新型拆垛装置结构示意图;
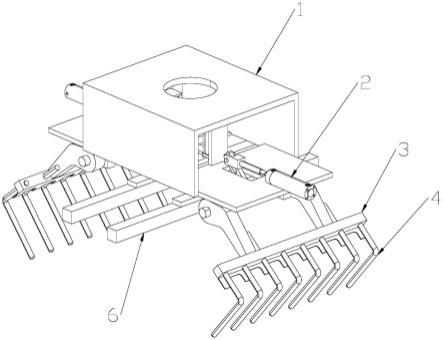
15.图2是本实用新型拆垛装置部分结构示意图;
16.图3是本实用新型控制逻辑图;
17.图4是本实用新型抓取拆垛原理图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
19.如图3所示,生产者需要在人机界面输入当前的生产物料类型,plc和机械臂通讯,将物料对应的程序号发送给机械臂,机械臂调用对应的程序,自动找寻工件,实现自动拆垛,达到料框最底部时,结束拆垛,并通过报警灯发出结束消息。
20.一种基于机械臂利用接近开关定位拆垛的装置,包括固定架1,如图1、图2所示,固定架1上设有对称分布的伸缩缸2固定架1上转动设有对称分布的转动件3,转动件3上设有阵列分布的夹爪4,位于两侧夹爪4的端部设置有接触开关,固定架1上设有对称分布的液压缸5,液压缸5的输出轴紧固连接有限位杆6,对称分布的液压缸5之间设有连接板7,连接板7上设有对称分布的激光测距传感器8。
21.转动件3包括支撑轴31,支撑轴31与固定架1转动连接,支撑轴31上设有连杆32,连杆32与伸缩缸2的输出轴滑动连接,支撑轴31上设有支撑架33,夹爪4与支撑架33通过可拆卸方式连接。
22.如图4所示,采用库卡cr60机械臂作为本体,固定架1安装在机械臂末端,利用装在机械臂末端夹爪4的接近开关4或激光测距传感器8,结合机械臂的中断功能,机械臂按照程序固定路线巡检,当接近开关触发时,启用机械臂的中断程序,终止巡检程序,并把当前位置反馈给机械臂控制器,机械臂控制器获得当前位置后,加上料棒的直径作为偏移值,从而获得要抓取的料棒的位置,移动机器人到达此位置,启动夹爪,实现对不同直径棒料的智能抓取。
23.本实用新型能精准的对物料进行抓取拆垛,降低劳动强度,提高劳动效率设置至少两个接触开关或激光测距传感器有效的对具有一定长度的物料摆放方向进行定位,能够抓取不同摆放角度的物料,实现了智能化抓取物料,减小了工作强度,降低了维护成本。
24.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
25.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述
的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
技术特征:
1.一种基于机械臂利用接近开关定位拆垛的装置,包括固定架(1),其特征在于,所述固定架(1)上设有对称分布的伸缩缸(2),固定架(1)上转动设有对称分布的转动件(3),转动件(3)上设有阵列分布的夹爪(4),两侧的夹爪(4)的端部均设置有接触开关。2.根据权利要求1所述的一种基于机械臂利用接近开关定位拆垛的装置,其特征在于,所述固定架(1)上设有对称分布的液压缸(5),液压缸(5)的输出轴紧固连接有限位杆(6)。3.根据权利要求2所述的一种基于机械臂利用接近开关定位拆垛的装置,其特征在于,对称分布的液压缸(5)之间设有连接板(7),连接板(7)上设有对称分布的激光测距传感器(8)。4.根据权利要求1所述的一种基于机械臂利用接近开关定位拆垛的装置,其特征在于,所述转动件(3)包括支撑轴(31),支撑轴(31)与固定架(1)转动连接,支撑轴(31)上设有连杆(32),连杆(32)与伸缩缸(2)的输出轴滑动连接,支撑轴(31)上设有支撑架(33)。5.根据权利要求4所述的一种基于机械臂利用接近开关定位拆垛的装置,其特征在于,所述夹爪(4)与支撑架(33)通过可拆卸方式连接。
技术总结
本实用新型公开一种基于机械臂利用接近开关定位拆垛的装置,包括固定架,所述固定架上设有对称分布的伸缩缸,固定架上转动设有对称分布的转动件,转动件上设有阵列分布的夹爪,两侧的夹爪的端部均设置有接触开关;所述固定架上设有对称分布的液压缸,液压缸的输出轴紧固连接有限位杆;对称分布的液压缸之间设有连接板,连接板上设有对称分布的激光测距传感器。本实用新型能精准的对物料进行抓取拆垛,降低劳动强度,提高劳动效率设置至少两个接触开关或激光测距传感器有效的对具有一定长度的物料摆放方向进行定位,能够抓取不同摆放角度的物料,实现了智能化抓取物料,减小了工作强度,降低了维护成本。降低了维护成本。降低了维护成本。
技术研发人员:金湖 毕晨 陈光义
受保护的技术使用者:安徽交通职业技术学院
技术研发日:2022.03.08
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。