技术特征:
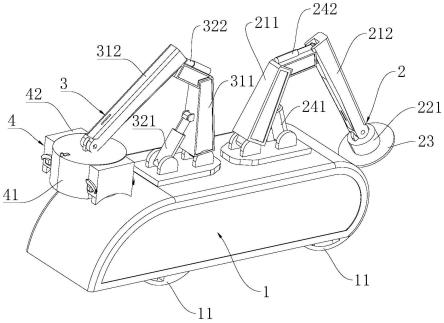
1.一种轮船船体修复机器人,其特征在于:包括运载平台、粗打磨机构和精修机构;所述运载平台的底部转动连接有驱动滚轮,所述运载平台内部设置有运载驱动电机及运载传动机构,所述运载驱动电机经运载传动机构连接所述驱动滚轮;所述运载平台或所述驱动滚轮内部设置有第一电磁铁;所述运载平台的一端设置所述粗打磨机构,所述粗打磨机构包括第一支撑臂架和粗打磨盘,所述第一支撑臂架的一端连接所述运载平台,所述第一支撑臂架的另一端连接所述粗打磨盘;所述运载平台的另一端设置所述精修机构,所述精修机构包括第二支撑臂架和精修总成,所述第二支撑臂架的一端连接所述运载平台,所述第二支撑臂架的另一端连接所述精修总成;所述精修总成包括工作仓和料仓,所述工作仓内部设置有机械手、超声波探伤器、破除修整单元、焊接单元和喷漆单元,所述机械手可择一连接超声波探伤器、破除修整单元、焊接单元和喷漆单元,所述工作仓的侧面布置至少一个料仓,所述料仓内放置有船体材料,所述料仓内设置有传送臂,所述传送臂可将所述船体材料输送至工作仓内部。2.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述机械手包括回转支承、第一伺服电机、驱动齿轮、支撑架、第二伺服电机、丝杆、螺母、滑杆、滑座、第一电动推杆和抓手;所述回转支承的转动圈可相对于所述回转支承的固定圈转动,所述回转支承的固定圈固定连接所述工作仓,所述回转支承的转动圈上设置有齿圈;所述第一伺服电机固定连接所述工作仓,所述第一伺服电机的输出转轴设置所述驱动齿轮,所述驱动齿轮啮合所述齿圈;所述支撑架固定连接所述回转支承的转动圈,所述支撑架上设置第二伺服电机,第二伺服电机的输出转轴连接所述丝杆,所述丝杆配合所述螺母;所述支撑架上设置所述滑杆,所述滑杆与所述丝杆平行布置,所述滑杆滑动连接所述滑座,所述滑座固定连接所述螺母;所述滑座上设置所述第一电动推杆,所述第一电动推杆沿竖直方向布置,所述第一电动推杆的末端设置所述抓手,所述抓手用于择一连接超声波探伤器、破除修整单元、焊接单元和喷漆单元。3.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述破除修整单元包括第一座体、第二电动推杆、第三伺服电机、主传动杆、击打机构、打磨机构和切割机构;所述第二电动推杆的固定端固定连接所述第一座体,所述第二电动推杆的伸缩端设置第三伺服电机,第三伺服电机的输出转轴连接所述主传动杆,所述主传动杆上设置有第一传动端、第二传动端和第三传动端;所述第一传动端可传动连接所述击打机构,所述第二传动端可传动连接所述打磨机构,所述第三传动端可传动连接所述切割机构。4.根据权利要求3所述的一种轮船船体修复机器人,其特征在于:所述击打机构包括击打驱动齿轮、击打第一被动齿轮、击打第一传动杆、击打第二被动齿轮、击打第三被动齿轮、击打第二传动杆、击打凸轮、击打压杆、击打杠杆、击打支座和击打锤;所述驱动齿轮下端的中间位置开设第一传动槽,所述第一传动端可配合于所述第一传动槽内,所述驱动齿轮啮合所述击打第一被动齿轮,所述击打第一被动齿轮经击打第一传动杆连接所述击打第二被
动齿轮,击打第一被动齿轮、击打第一传动杆及击打第二被动齿轮同轴布置,击打第二被动齿轮啮合所述击打第三被动齿轮,击打第二被动齿轮的轴线与击打第三被动齿轮的轴线垂直布置,所述击打第三被动齿轮经击打第二传动杆连接所述击打凸轮,所述击打凸轮的边沿位置铰接击打压杆的一端,击打压杆的另一端铰接击打杠杆的一端,所述击打压杆沿着竖直方向布置,击打杠杆的中间位置铰接击打支座,击打杠杆的另一端设置所述击打锤。5.根据权利要求4所述的一种轮船船体修复机器人,其特征在于:所述打磨机构包括打磨驱动座、驱动套筒和精打磨盘;打磨驱动座转动连接于第一座体上,所述打磨驱动座上端的中间位置开设第二传动槽,所述第二传动端可配合于所述第二传动槽内,所述打磨驱动座固定连接所述驱动套筒,所述驱动套筒的下端设置所述精打磨盘。6.根据权利要求5所述的一种轮船船体修复机器人,其特征在于:所述切割机构包括切割驱动套、第一锥齿轮、切割支撑座、第二锥齿轮、切割传动轴、切割片、衔铁、弹簧和第二电磁铁;所述第三传动端设置为花键轴,所述切割驱动套上端的中间位置开设花键槽,所述花键轴位于所述花键槽内,所述切割驱动套的下端设置第一锥齿轮,所述切割驱动套与所述第一锥齿轮同轴布置;所述切割支撑座位于所述精打磨盘的中间位置,所述切割支撑座转动连接所述精打磨盘,所述切割支撑座上转动连接所述第二锥齿轮,所述第二锥齿轮经切割传动轴连接所述切割片,所述第二锥齿轮与所述切割传动轴同轴布置;所述切割支撑座上设置衔铁,所述切割支撑座与所述驱动套筒之间连接所述弹簧,所述切割支撑座的一侧设置所述第二电磁铁,所述第二电磁铁通电后,所述衔铁被吸附后带动所述切割支撑座相对于所述精打磨盘翻转,使所述第二锥齿轮啮合所述第一锥齿轮。7.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述焊接单元包括第二座体、焊料出料机构和焊枪,所述第二座体上设置所述焊料出料机构和焊枪。8.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述喷漆单元包括第三座体和若干个喷漆头,所述第三座体上设置所述喷漆头。9.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述工作仓内部还设置有水泵,所述水泵的进水端连接进水管,所述进水管位于所述工作仓内部,所述水泵的出水端连接排水管,所述排水管的末端位于所述工作仓外部。10.根据权利要求1所述的一种轮船船体修复机器人,其特征在于:所述料仓可经摆动机构相对于所述工作仓摆动,所述料仓可向下摆动以对接所述工作仓,所述工作仓的侧面于料仓与工作仓的对接位置开设可开、关的门扇;所述摆动机构包括弧形滑槽、弧形滑轨和弧形滑套,所述弧形滑槽的一端固定连接所述工作仓的外壁,所述弧形滑槽内滑动连接所述弧形滑轨,所述弧形滑轨可从所述弧形滑槽的另一端伸出或缩回,所述弧形滑套嵌套于弧形滑槽及弧形滑轨上,所述弧形滑套可相对于弧形滑槽及弧形滑轨滑动,所述弧形滑套固定连接所述料仓的外壁。
技术总结
本发明提供了一种轮船船体修复机器人,涉及海洋装备技术领域。该轮船船体修复机器人,包括运载平台、粗打磨机构和精修机构。该轮船船体修复机器人,可以对轮船的船体局部损坏进行修复作业,先将运载平台吸附于船体,使驱动滚轮沿着船体移动至待修复区域位置,通过粗打磨机构对船体待修复区域的附着物进行清除,再利用精修机构的机械手择一连接超声波探伤器、破除修整单元、焊接单元和喷漆单元,利用超声波探伤器探测船体待修复区域内部存在缺陷的位置,利用破除修整单元对船体存在缺陷的位置进行切割、击打及打磨作业,利用传送臂将料仓内的船体材料输送至工作仓内,利用焊接单元将船体材料焊接至船体,利用喷漆单元对作业区域进行喷漆作业。进行喷漆作业。进行喷漆作业。
技术研发人员:赵新学 陈鹏 王正圆 刘宗彬
受保护的技术使用者:滨州学院
技术研发日:2022.04.13
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。