1.本发明涉及车辆编队技术领域,更具体地说是指一种车辆编队控制方法。
背景技术:
2.车辆编队技术近年来被广泛研究,该技术是指在某些特定场景下,由数辆车自动组成车队,第一辆车作为领航车,后面数辆跟随车自动以较小的车辆间距跟随领航车行驶,跟随车可以只配置安全员甚至无人驾驶。该技术有效的解决交通拥挤提高交通效率,降低车队能耗,增加人和货物运载力的同时能够大大降低司机长距离驾驶的疲劳度。并且由于车辆编队行驶的车间间距小,在较高车速下能够明显降低车辆行驶风阻,从而降低车队能耗,节省了运营成本。
3.目前在车辆编队技术中,跟随车(n号车)大多都是跟随前车(n-1号车)的行驶轨迹,由于存在横向控制误差,并且该误差会逐辆车累计,导致编队内越靠后的车,横向位置偏差越大,存在有横向误差累计的问题;此外,目前的车辆编队技术大多都是基于定位信息的轨迹跟踪,不可避免的会遇到定位信息漂移的问题。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种车辆编队控制方法。
5.本发明采用如下技术方案:一种车辆编队控制方法,包括如下步骤:步骤一,初始化,构建整体的交互方案;即设计车辆编队包含的车辆总数为n(n≥2),单车编号为n(),单车编号为n=1为领航车,单车编号为n=2、3、
……
n为跟随车;设定领航车发送的信息包内容,所有车辆将信息包通过v2v技术实时广播发送,n号车(n≥2)同时接收领航车和号车的信息包;步骤二,判断领航车是否下发编队组成指令,若“是”则进入步骤二,若“否”则进入步骤一;步骤三,当n号车(本车)接收到领航车的编队组成指令后,同时判断n-1号车(前车)是否进入编队状态,若“是”则进入步骤四,若“否”则进入步骤二;步骤四,判断领航车位置是否满足约束条件,若“是”则进入步骤五,若“否”则进入步骤三;步骤五,领航车位置满足约束条件,本车进行轨迹规划并跟随;轨迹规划和跟随方式为,首先,本车进入编队模式的当前时刻,以本车当前位置作为坐标原点,本车当前朝向为x轴的大地坐标系,同时记录该时刻领航车的经纬度坐标和航向角,并以此作为本车轨迹规划的目标位置状态,通过轨迹规划的方式,规划出一条接入领航车行驶轨迹的曲线;其次,本车进入编队模式的瞬时,开始实时保存前车的经纬度坐标、航向角作为领航车的行驶轨迹信息存入控制器,同时实时根据本车的位置,计算出领航车行驶轨迹上距离本车当前位置最近的轨迹点,再根据轨迹点的经纬度坐标、航向角,计算本车与轨迹点间的横向距离
偏差、航向角偏差;随后进入步骤六;步骤六,判断本车是否进入领航车轨迹,即当本车完成上一步骤的轨迹规划并且车辆跟随轨迹到达领航车的轨迹上时,则本车进入编队状态,进入步骤七,否则进入步骤五;步骤七,本车进入编队状态,同时发送编队组成状态标志为1,并开始对领航车轨迹进行循迹控制,开始以轨迹点为跟踪目标进行跟随,将和输入横向控制模块,从而实现对领航车轨迹的循迹控制。
6.进一步地,所述领航车发送的信息包内容包括领航车的经纬度坐标、航向角、车速v、方向盘转角a、实际制动开度b、编队组成指令;所述跟随车发送的信息包内容包括跟随车的经纬度坐标、航向角、车速v、方向盘转角a、实际制动开度b、编队组成状态标志0或1(标志为0表示跟随车未进入编队状态,标志为1表示跟随车已进入编队状态)。
7.进一步地,所述步骤四中,每辆跟随车都建立以本车实时位置为坐标原点、本车实时朝向为x轴的车辆坐标系,同时记录领航车此时的经纬度坐标和航向角,并进行坐标变换,计算出领航车在本车车辆坐标系下的航向角、位置角、x坐标、y坐标。为了保证轨迹规划的可执行性,设置跟随车进入编队模式的约束条件、,其中和x为根据车速设定的阈值,领航车位置满足以上条件,跟随车方可进入编队模式。
8.进一步地,所述步骤五中,轨迹规划采用五次多项次规划。
9.进一步地,车辆上装有车辆编队控制器和线控底盘控制器,线控底盘控制器的作用是接收车辆编队控制的控车指令,并将指令统一协调处理后,发送给驱动电机、制动系统、转向系统;车辆编队控制器与线控底盘控制器的横纵向控制接口为,方向盘转角指令、油门开度指令(0~100%)、制动开度指令(0~100%);线控底盘控制器接收到油门开度指令,将指令转换为电机扭矩指令发送给电机控制器;收到制动开度指令,将指令转换为制动压力请求发送给制动控制器。
10.进一步地,所述步骤七中,本车即跟随车进入编队状态下,横向跟踪领航车的轨迹,而纵向的控制目标是和前车保持固定的距离;在跟随车的纵向控制上,采用设定编队相邻两车之间的目标间距为;前后两车实际间距为;前车车速;本车车速为,设计双反馈的pid闭环控制器,步骤如下,以前车车速为跟踪目标,则车速误差;以目标间距为控制目标,则距离误差。设计车速误差的权重系数和距离误差的权重系数,使得总误差。将输入pid反馈控制器,pid反馈控制器的输出为,限制范围为[-100,100],当值为(0,100],则以油门开度指令发送;当值为[-100,0),则以制动开度指令发送,同时,加入前车的实际制动开度b进行补偿控制,则最终输出的,将最终输出的做范围限制 。
[0011]
进一步地,所述步骤七中,本车即跟随车的横向控制为,设计基于预瞄的横向模糊
pid反馈控制器,将横向距离偏差、航向角偏差输入控制器,控制器的输出为,加入领航车的实际方向盘转角a进行补偿控制,则最终输出的。
[0012]
进一步地,所述的上下限位所述其中为方向盘转角限制范围的偏移量,可根据实际情况设置为50
°
~200
°
。
[0013]
由上述对本发明结构的描述可知,和现有技术相比,本发明具有如下优点:1、本发明一种车辆编队控制方法,首先初始化构建整体交互方案,并由领航车下发编队组成指令,当n号车接收到领航车的编队组成指令,同时n-1号车已进入编队状态,此时n号车若条件允许则开始进入编队模式,成功进入编队状态后,广播发送编队组成状态标志为1,其中在跟随车进入编队模式时采用特有的方式进行五次多项次规划跟随车的轨迹规划,保证轨迹曲率连续,实现跟随车的行驶轨迹接入领航车行驶轨迹时,横向控制目标不发生突变,进而降低跟随车的横向误差,减少横向误差累计。此外,本发明提出了所有跟随车在进入编队模式前,需领航车是否满足约束条件,即可实现同时跟踪领航车的行驶轨迹,同时在纵向上控制与前车的距离,进一步解决横向误差累计的问题。
[0014]
2、本发明跟随车在编队状态下,通过预瞄的横向模糊pid反馈控制器,将横向距离偏差、航向角偏差输入控制器,控制器的输出为,为了保证横向控制的稳定性、尽可能小的横向稳态误差以及更快的控制响应速度,加入领航车的实际方向盘转角a进行补偿控制,则最终输出的。同时为了防止车辆定位信息的漂移造成不可控的后果,限制的上下限为,其中为方向盘转角限制范围的偏移量,可根据实际情况设置为50
°
~200
°
,如此可以大幅度避免由于定位漂移造成横向突然失控的严重后果。
[0015]
3、本发明跟随车在编队状态下,设定编队相邻两车之间的目标间距为;前后两车实际间距为;前车车速;本车车速为,设计双反馈的pid闭环控制器,以前车车速为跟踪目标,则车速误差;以目标间距为控制目标,则距离误差,设计车速误差的权重系数和距离误差的权重系数,使得总误差;将总误差输入pid反馈控制器,控制器的输出为,限制范围为[-100,100],当值为(0,100],则以油门开度指令发送;当值为[-100,0),则以制动开度指令发送;为了尽可能加快制动的响应速度,即前车做出制动动作,后车能够及时产生对应的制动动作,需加入前车的实际制动开度b进行补偿控制,则最终输出的;同时为了防止车辆定位信息的漂移造成不可控的后果,将最终输出的做范围限制 ,即后车的制动强度不能够低于前车,如此能够大幅度避免编队追尾的风险。
[0016]
5、本发明在跟随车编队状态下,对领航车轨迹进行循迹控制时,将领航车的方向盘转角信息和前车的制动信号引入跟随车辆进行补偿控制和限制,大大降低了由于定位漂移造成车辆突然失控的可能性。
附图说明
[0017]
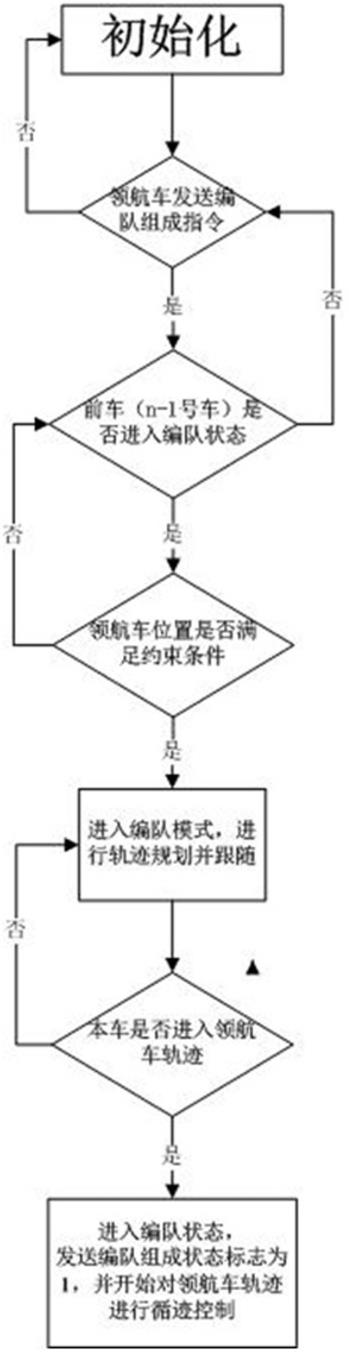
图1为本发明的流程示意图;图2为本发明跟随车的轨迹规划及跟随示意图;图3为本发明车辆编队控制器和线控底盘控制器的结构框图。
具体实施方式
[0018]
下面参照附图说明本发明实施例的具体实施方式。
[0019]
参照图1,一种车辆编队控制方法,包括如下步骤,步骤一,初始化,构建整体的交互方案,具体为:设计车辆编队包含的车辆总数为n(n≥2),单车编号为n(,n=2为领航车,n2、3
……
n为跟随车)。设定领航车发送的信息包内容为:经纬度坐标、航向角、车速v、方向盘转角a、实际制动开度b、编队组成指令;设定跟随车发送的信息包内容为:经纬度坐标、航向角、车速v、方向盘转角a、实际制动开度b、编队组成状态标志0或1(标志为0表示跟随车未进入编队状态,标志为1表示跟随车已进入编队状态)。所有车辆将信息包通过v2v技术实时广播发送,n号车(n≥2)同时接收领航车和号车(前车)的信息包。
[0020]
步骤二,判断领航车是否下发编队组成指令,若“是”则进入步骤二,若“否”则进入步骤一。
[0021]
步骤三,当n号车(即本车,也就是跟随车)接收到领航车的编队组成指令后,同时判断号车(前车)是否进入编队状态,若“是”则进入步骤四,若“否”则进入步骤二。
[0022]
其中,当n号车为2号车时,判断若条件允许(具体条件下文给出),则率先进入编队模式,当2号车成功进入编队状态(具体条件由下文给出)后,广播发送编队组成状态标志为1。3号车收到领航车的下发编队组成指令和2号车的编队组成状态标志位为1后,若条件允许,则开始进入编队模式,成功进入编队状态后,广播发送编队组成状态标志为1。以此类推,当n号车接收到领航车的编队组成指令,同时号车已进入编队状态,此时n号车若条件允许则开始进入编队模式,成功进入编队状态后,广播发送编队组成状态标志为1。
[0023]
步骤四,判断领航车位置是否满足约束条件,若“是”则进入步骤五,若“否”则进入步骤三。具体为:每辆跟随车,都建立以本车实时位置为坐标原点、本车实时朝向为x轴的车辆坐标系,同时记录领航车此时的经纬度坐标和航向角,并进行坐标变换,计算出领航车在本车车辆坐标系下的航向角、位置角、x坐标、y坐标。为了保证轨迹规划的可执行性,设置跟随车进入编队模式的约束条件、,其中和x为根据车速设定的阈值,车速高,可设定较小的值和较大的x值;车速低,可设定较大的值和较小的x值。
[0024]
步骤五,领航车位置满足约束条件,本车(跟随车)进行轨迹规划并跟随,如图2,具体为:首先,跟随车进入编队模式的当前时刻,建立以本车当前位置为坐标原点、本车当前朝向为x轴的大地坐标系,同时记录该时刻领航车的经纬度坐标和航向角,并以此作为本车轨迹规划的目标位置状态,通过轨迹规划的方式,规划出一条接入领航车行驶轨迹的曲线。轨迹规划方式采用五次多项次规划,该规划方法能够保证轨迹曲率连续,即能够实现跟
随车的行驶轨迹接入领航车行驶轨迹时,横向控制目标不发生突变。
[0025]
其次,跟随车进入编队模式的瞬时,开始实时保存前车的经纬度坐标、航向角作为领航车的行驶轨迹信息存入控制器,同时实时根据跟随车本车位置,计算出领航车行驶轨迹上距离本车当前位置最近的轨迹点(匹配点),再根据匹配点的经纬度坐标、航向角,计算本车与匹配点间的横向距离偏差、航向角偏差。随后,进入步骤六。
[0026]
步骤六,判断本车是否进入领航车轨迹,即当本车完成上一步骤的轨迹规划并且车辆跟随轨迹到达领航车的轨迹上时,则本车进入编队状态,进入步骤七,否则进入步骤五。
[0027]
步骤七,本车进入编队状态,同时发送编队组成状态标志为1,并开始对领航车轨迹进行循迹控制,开始以轨迹点为跟踪目标进行跟随,将和输入横向控制模块,从而实现对领航车轨迹的循迹控制。
[0028]
在步骤七中,跟随车开始对领航车轨迹进行循迹控制时,需基于车辆线控接口对跟随车的横向和纵向进行控制。其具体控制方法如下:首先,如图3,车辆上装有车辆编队控制器和线控底盘控制器,线控底盘控制器的作用是接收上层(车辆编队控制器)的控车指令,并将指令统一协调处理后,发送给各个执行机构(驱动电机、制动系统、转向系统等)。车辆编队控制器与线控底盘控制器主要的横纵向控制接口为:方向盘转角指令、油门开度指令(0~100%)、制动开度指令(0~100%)。线控底盘控制器接收到油门开度指令,将指令转换为电机扭矩指令发送给电机控制器;收到制动开度指令,将指令转换为制动压力请求发送给制动控制器。
[0029]
其次,实现对跟随车的纵向控制;即跟随车在编队状态下,横向跟踪领航车的轨迹,而纵向的控制目标是和前车保持固定的距离。由于距离是车速的积分量,所以单纯的距离控制响应灵敏度差、容易造成控制的震荡,因此引入前车车速进行控制,控制目标是本车和前车具有相同的车速。设定编队相邻两车之间的目标间距为;前后两车实际间距为;前车车速;本车车速为,设计双反馈的pid闭环控制器,步骤如下:以前车车速为跟踪目标,则车速误差;以目标间距为控制目标,则距离误差。设计车速误差的权重系数和距离误差的权重系数,使得总误差。将输入pid反馈控制器,控制器的输出为,限制范围为[-100,100],当值为(0,100],则以油门开度指令发送;当值为[-100,0),则以制动开度指令发送。
[0030]
为了尽可能加快制动的响应速度,即前车做出制动动作,后车能够及时产生对应的制动动作,需加入前车的实际制动开度b进行补偿控制,则最终输出的。同时为了防止车辆定位信息的漂移造成不可控的后果,将最终输出的做范围限制 ,即后车的制动强度不能够低于前车,如此能够大幅度避免编队追尾的风险。
[0031]
实现对跟随车的纵向控制;设计基于预瞄的横向模糊pid反馈控制器,将横向距离
偏差、航向角偏差输入控制器,控制器的输出为。为了保证横向控制的稳定性、尽可能小的横向稳态误差以及更快的控制响应速度,加入领航车的实际方向盘转角a进行补偿控制,则最终输出的。同时为了防止车辆定位信息的漂移造成不可控的后果,限制的上下限为,其中为方向盘转角限制范围的偏移量,可根据实际情况设置为50
°
~200
°
,如此可以大幅度避免由于定位漂移造成横向突然失控的严重后果。
[0032]
上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。