1.本实用新型涉及机器人技术领域,尤其涉及一种可移动式的充电机器人结构。
背景技术:
2.近年来,我国对于新能源汽车充电的解决方式大多都是在一定区域内设置充电桩来对新能源汽车进行充电,但充电车位经常都被燃油车占用,降低了新能源汽车充电的效率。
3.现有技术提供了一种可移动式的充电机器人,包括车架和充电枪,充电枪固定在车架上,通过车架驱动带动充电枪移动至新能源汽车处进行充电,实现该区域的灵活充电,提高新能源汽车的充电效率。
4.上述技术中,充电枪高度固定无法调节,无法适用于不同车型的新能源汽车。
技术实现要素:
5.本实用新型的目的在于提供一种可移动式的充电机器人结构,解决了移动充电机器人充电枪高度固定,无法适用不同车型的新能源汽车的问题。
6.为实现上述目的,本实用新型提供了一种可移动式的充电机器人结构,包括移动座和充电枪,
7.还包调节组件,所述调节组件包括直流电机、感应模块和转动臂,所述直流电机与所述移动座固定连接,且位于所述移动座顶部,所述感应模块设置于所述直流电机一侧,所述转动臂与所述直流电机固定连接,且位于远离所述移动座一侧,所述充电枪与所述转动臂转动连接,且位于远离所述直流电机一侧。
8.其中,所述调节组件还包括控制模块,所述控制模块设置于所述感应模块内。
9.其中,所述转动臂包括第一转动座、第二转动座和连接臂,所述第一转动座与所述直流电机固定连接,且位于远离所述移动座一侧,所述连接臂与所述第一转动座转动连接,且位于远离所述移动座一侧,所述第二转动座与所述连接臂转动连接,且位于远离所述第一转动座一侧。
10.其中,所述连接臂包括两个侧板和连接杆,两个所述侧板分别设置于所述第一转动座和所述第二转动座之间,所述连接杆与两个所述侧板拆卸连接,且位于两个所述侧板之间。
11.其中,所述感应模块包括外壳、摄像头和传感器,所述外壳与所述直流电机固定连接,且位于所述直流电机一侧,所述摄像头与所述外壳固定连接,且位于所述外壳内,所述传感器与所述外壳固定连接,且位于靠近所述摄像头一侧,所述控制模块与所述外壳固定连接,且位于靠近所述传感器一侧。
12.本实用新型的一种可移动式的充电机器人结构,通过所述直流电机驱动所述移动座移动,从而带动所述充电枪在充电区域移动,机器人通过所述感应模块感应躲避该区域车辆,防止机器人碰撞刮伤车辆,机器人移动到新能源汽车处时,使用者根据新能源汽车的
高度转动所述转动臂,从而调节所述充电枪到合适位置进行充电,解决了移动充电机器人充电枪高度固定,无法适用不同车型的新能源汽车的问题。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
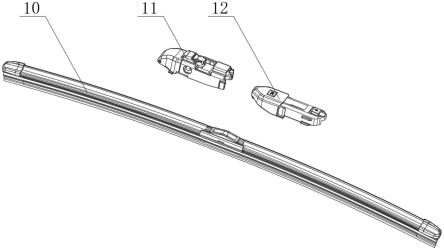
14.图1是本实用新型第一实施例的整体的结构示意图。
15.图2是本实用新型第一实施例的转动臂的结构示意图。
16.图3是本实用新型第三实施例的感应模块的内部剖视图。
17.图4是采用canny算子方法的流程图。
18.图5是充电插座孔示意图。
19.图6是充电插座平面与成像平面投影关系。
20.101-移动座、102-充电枪、103-调节组件、104-直流电机、105-感应模块、106-转动臂、107-控制模块、108-第一转动座、109-第二转动座、110-连接臂、111-侧板、112-连接杆、113-外壳、114-摄像头、115-传感器。
具体实施方式
21.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
22.本技术第一实施例为:
23.请参阅图1-图6,包括移动座101、充电枪102和调节组件103,所述调节组件103包括直流电机104、感应模块105、转动臂106和控制模块107,所述转动臂106包括第一转动座108、第二转动座109和连接臂110,所述连接臂110包括两个侧板111和连接杆112。
24.针对本实施方案,所述移动座101驱动机器人移动带动所述充电枪102移动,所述充电枪102用于对新能源汽车充电。
25.其中,所述直流电机104与所述移动座101固定连接,且位于所述移动座101顶部,所述感应模块105设置于所述直流电机104一侧,所述转动臂106与所述直流电机104固定连接,且位于远离所述移动座101一侧,所述充电枪102与所述转动臂106转动连接,且位于远离所述直流电机104一侧,所述直流电机104驱动所述移动座101移动,所述感应模块105感应躲避该区域车辆,防止机器人碰撞刮伤车辆,所述转动臂106转动改变所述充电枪102的高度和角度,适用于不同车型的新能源汽车充电。
26.其次,所述控制模块107设置于所述感应模块105内,所述控制模块107包括wifi和蓝牙等功能模块,以方用户利用手机app进行操作。
27.再次,所述第一转动座108与所述直流电机104固定连接,且位于远离所述移动座101一侧,所述连接臂110与所述第一转动座108转动连接,且位于远离所述移动座101一侧,所述第二转动座109与所述连接臂110转动连接,且位于远离所述第一转动座108一侧,所述第一转动座108转动改变所述连接臂110的角度,调节机器人和车身距离,所述第二转动座109转动调节所述充电枪102的高度和角度,适用于不同车型的新能源汽车充电,所述连接
臂110用于对所述第二转动座109和所述充电枪102进行支撑。
28.另外,两个所述侧板111分别设置于所述第一转动座108和所述第二转动座109之间,所述连接杆112与两个所述侧板111拆卸连接,且位于两个所述侧板111之间,所述连接杆112的设置,便于拆卸两个所述侧板111安装所述第一转动座108和所述第二转动座109的同时,所述侧板111用于连接所述第一转动座108和所述第二转动座109。
29.最后,所述外壳113与所述直流电机104固定连接,且位于所述直流电机104一侧,所述摄像头114与所述外壳113固定连接,且位于所述外壳113内,所述传感器115与所述外壳113固定连接,且位于所述靠近所述摄像头114一侧,所述控制模块107与所述外壳113固定连接,且位于靠近所述传感器115一侧,所述外壳113用于保护所述摄像头114和所述传感器115,所述摄像头114和所述传感器115的设置,便于机器人在车辆之间移动,防止机器人碰撞到车辆,所述传感器115为激光位移传感器。
30.使用时,通过所述直流电机104驱动所述移动座101移动,从而带动所述充电枪102在充电区域移动,机器人通过所述感应模块105感应躲避该区域车辆,防止机器人碰撞刮伤车辆,机器人移动到新能源汽车处时,使用者根据新能源汽车的高度转动所述转动臂106,从而调节所述充电枪102到合适位置进行充电,具体的,对于机器人进行视觉定位方面,采用canny算子方法进行充电孔的定位。首先获取图像,对所获取的图像进行边缘检测,利用高斯算法对图像进行卷积,利用如下公式
[0031][0032][0033]
式中,为x方向的梯度,为y方向的梯度,a为幅度,θ为方向角度,x和y分别为相机图像坐标系中的横、纵坐标值。
[0034]
将图像梯度计算转化为像素灰度变化,获取左右两个目标区域的中心点,来实现圆心的粗定位。通过粗定位的圆心和半径对canny算子检测到的边缘进行半径约束,确定其像素级边缘,粗定边缘拟合出椭圆方程,椭圆的表达式为f(x,y)=x2 axy by2 cx dy e=0,利用最小二乘法确定各系数,由极值原理,各系数的偏导相等且为0得到线性方程组,结合约束条件可解出各系数的值,进而求出椭圆的位置参数和形状参数,从而拟合出椭圆方程。利用径向截面扫描确定边缘梯度,基于大津法进行边缘梯度阈值确定。将径向上的梯度幅值经过阈值过滤后得到许多连续的片段,取包含粗定边缘的连续区域得到径向边缘区域,利用区域内梯度值作为补充信息,采用梯度质心法确定亚像素级边缘,并用最小二乘椭圆拟合法计算得到圆心像素坐标。将所得o、o1、o2圆心坐标建立平面oo1o2,其中o、o1、o2代表校准相机获取相机的内部以及外部参数和相机坐标系与世界坐标系的转换关系得出的圆心的世界坐标,建立以圆心o为坐标原点,平面oo1o2为xoy,过圆心o垂直于xoy的法向量为z轴的坐标系,确定为充电孔坐标系。整体算法流程如下图4所示。在进行手眼标定的过程时,需要求取机器人坐标系、末端连杆坐标系、工具坐标系和充电孔坐标系。其中,在标定时,首先示教机器人将所述充电枪102插入充电插座,读取并记录充电插座中心在机器人坐标系中位置坐标p1(x1,y1,z1),并以此作为充电插座的标准位置;然后,示教机器人移动到合适的标准拍摄位置,使得采集图像时充电插座尽可能位于图像中心,记录标准拍摄位置的机
器人坐标p1(x1,y1,z1)和所述传感器115的检测值d1,同时通过形状匹配确定充电插座中心点在采集图像中的像素坐标q1(u1,v1)。
[0035]
以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。