1.本实用新型涉及一种适合复杂场地且不易偏载的双横轨单轨吊运系统。
背景技术:
2.现有单轨吊车的轨道主要是为承载竖直负载而设计的,如果吊装位于一侧的重物,形成偏载,如图1所示,容易将轨道拉变形。因此,现有技术中,单轨吊车自带的电动钢丝绳绞盘只能吊装轨道正下方的重物,很不方便。
3.目前井下单轨吊车多用于运输设备、整装物料,效果良好。但存在轨道利用率低,空置时间长的现象,且物料无法实现在巷道内的横向搬运。当设备、物料通过单轨吊运输落地后,仍然需要作业人员进行二次搬运、码放至巷道两侧。即有安全隐患,降低了工作效率,又增加了人员作业强度。而且很多情况下,不能横向搬运,不适合周边设备多、环境复杂井下场所使用。
技术实现要素:
4.本实用新型要解决的技术问题是如何克服现有井下单轨吊车的容易偏载,不能横向搬运,不适合周边设备多、环境复杂井下场所使用的缺陷,提供一种适合复杂场地且不易偏载的双横轨单轨吊运系统。
5.为解决上述技术问题,本适合复杂场地且不易偏载的双横轨单轨吊运系统包括单轨吊行走机构和起吊箱,所述起吊箱固定在单轨吊行走机构下方,其特征在于:起吊箱的四角上分别垂直固定有一个液压支撑腿,且各液压支撑腿顶端分别设有托板,并配有液压操控阀组,四根液压支撑腿均为柱塞油缸,分别包括缸筒、柱塞、导套、密封圈和压盖,配用单轨左侧的两个液压支撑腿的缸筒根部内腔通过高压管相通,其右侧的两个液压支撑腿的缸筒根部内腔通过高压管相通,所述起吊箱下方设有横向轨道,横向轨道上设有电动横向滑车,电动横向滑车上设有电动钢丝绳绞盘,电动横向滑车和电动钢丝绳绞盘分别配有驱动电机,并配有操控器,该操控器上有上升按钮、下降按钮、左移按钮和右移按钮,并通过有线或无线与电动横向滑车和电动钢丝绳绞盘的驱动电机相连,对二者分别进行控制,所述起吊箱侧壁上设有显示屏,并配有左液压传感器和右液压传感器和plc控制器,左液压传感器与左前或/和左后支液压支撑腿的缸筒根部内腔相通,右液压传感器与右前或/和右后支液压支撑腿的缸筒根部内腔相通,所述左、右液压传感器与plc控制器的信号输入端相连,所述显示屏与plc控制器的信号输出端相连,并在plc控制器下,在显示屏上同时显示左液压传感器和右液压传感器感应到的液压数值及二者之间的差值,所述单轨吊行走机构与起吊箱通过旋转台连接,所述横向轨道共有两条,每条横向轨道上分别设有电动横向滑车,电动横向滑车上设有电动钢丝绳绞盘。
6.如此设计,电动钢丝绳绞盘在横向轨道一侧起吊重物前,先将四根液压支撑腿伸出,其托板与周边巷道顶板相接。然后周边环境,规划过起吊步骤和线路,将一个电动钢丝绳绞盘选为主起吊机构,将其钢丝绳下端固定在待起吊重物上;将另一个电动钢丝绳绞盘
选为调整机构,将其钢丝绳下端固定在待起吊重物一侧,如图2所示。然后用主起吊机构,将待起吊重吊离底板16。上升过程,通过调整机构,牵拉、控制待起吊重物,即可将重物从复杂场所吊出。如此设计,便于调整待吊重物的左右方向及上下仰角,适合复杂的井下环境下使用。
7.在起吊过程中,当重物产生的负载,都施在起吊箱一侧,起吊箱的另一侧上翘,使该侧的液压支撑腿压向巷道顶板,巷道顶板通过液压支撑腿对上翘侧的起吊箱的反作用力也加大,这样使得单轨吊行走机构受到的合力始终保持竖直,从而避免了偏载。当然本专利可避免的偏载指的是说明附图1所述的对配用单轨施加的侧负载。
8.当然,如图2所示,主起吊机构和调整机构受力也偏向一侧。但是主起吊机构负责起主要起吊功能,方向偏转有限;而调整机构虽然方向偏转较大,但输出的力量有限,都不会以对作为主起吊机构和调整机构的电动钢丝绳绞盘造成损害。
9.作为优化,所述旋转台配有旋转驱动马达,所述操控器上设有控制该旋转驱动马达的正转按钮和反转按钮。如此设计,便于根据需要控制旋转台旋转。
10.本实用新型利用前述适合复杂场地且不易偏载的双横轨单轨吊运系统吊运重物的方法,包括下述步骤:
11.①
.将前述适合复杂场地且不易偏载的双横轨单轨吊运系统沿轨道移至待吊运重物上方;
12.②
.根据待吊运重物周边的上侧障碍物、下侧障碍物,旋转操作箱,使两条横向轨道位于上、下侧障碍物上方,通过操控器将一个电动横向滑车移至待吊运重物上方,并将其下方的电动钢丝绳绞盘选为主绞盘,将其钢丝绳下端固定在待起吊重物上;而将另一个电动钢丝绳绞盘选为调整绞盘,将其钢丝绳下端固定在待起吊重物一侧,
13.③
.通过液压操控阀组,使四根液压支撑腿伸展,并使其托板均与配用巷道顶板相接,左液压传感器和右液压传感器感应到的液压数值相等,且均不低于6kg/cm2,然后操纵操控器,利用主绞盘将待吊运重物吊起;
14.④
.然后操纵操控器,交替使用控制主起吊铰盘和调整绞盘,并根据需要调整待吊运重物的左右方向及上下仰角,直至待吊运重物远离周边上、下侧障碍物,完成起吊;
15.⑤
.然后操纵操控器,使电动横向滑车带动电动钢丝绳绞盘及其下重物,缓慢移向起吊箱正下方,直至左、右液压传感器感应到的液压数值的差值达到0.1kg/cm2以下,甚至达到0,
16.⑥
.通过液压操控阀组,使四根液压支撑腿收缩至最短状态,然后即可沿配用单轨,将横向轨道及其下方重物移至目的地附近;
17.⑦
.然后,通过液压操控阀组,使四根液压支撑腿伸展,并使其托板均与配用巷道顶板相接,左液压传感器和右液压传感器感应到的液压数值相等,且均不低于6kg/cm2;
18.⑧
.然后操纵操控器,使电动横向滑车带动电动钢丝绳绞盘及其下重物,缓慢移至目的地正下方,并将相应重物落到目的地上;
19.⑨
.然后,将主起吊铰盘和调整绞盘的钢丝绳从重物上解开,操纵操控器,使主起吊铰盘和调整绞盘的钢丝绳末端上升,并脱离地面,最后,通过液压操控阀组,使四根液压支撑腿收缩至最短状态,完成一次重物吊运过程。
20.起吊或释放重物前,都先使四个液压支撑腿伸展,其顶部托板充分接顶(与巷道顶
板接触),另一侧液压支撑腿轻微上翘,其上方巷道顶板施加反作用力也相应加大。以单轨吊行走机构与配用单轨的接触处为支点,增大的反作用力在起吊箱上产生的力矩与起吊重物通过横向轨道在起吊箱产生的力矩相等,且方向相反,相互抵消,始终保持平衡,如此一来,在起吊或释放重物过程中,配用单轨受到负载的合力方向始终是竖直的,不产生偏载问题。
21.本适合复杂场地且不易偏载的双横轨单轨吊运系统及其使用方法具有结构简单,使用方便,受力自动平衡的优点,适合煤矿井下使用。
附图说明
22.下面结合附图对本适合复杂场地且不易偏载的双横轨单轨吊运系统作进一步说明:
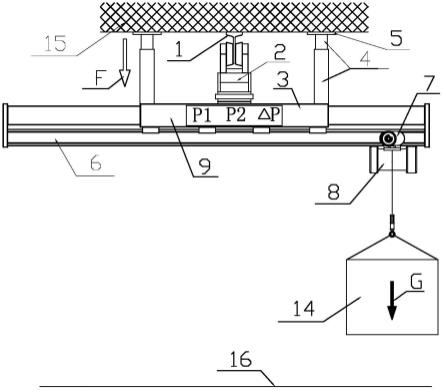
23.图1是现有单轨吊车偏载起吊示意图;
24.图2是本适合复杂场地且不易偏载的双横轨单轨吊运系统的俯视立体结构示意图;
25.图3是本适合复杂场地且不易偏载的双横轨单轨吊运系统的仰视立体结构示意图;
26.图4是本适合复杂场地且不易偏载的双横轨单轨吊运系统的起吊前期示意图;
27.图5是本适合复杂场地且不易偏载的双横轨单轨吊运系统的起吊后期示意图;
28.图6是本适合复杂场地且不易偏载的双横轨单轨吊运系统的起吊就位后的示意图。
29.图中:1为配用单轨、2为单轨吊行走机构、3为起吊箱、4为液压支撑腿、5为托板、6为横向轨道、7为电动横向滑车、8为电动钢丝绳绞盘、9为显示屏、10为左液压传感器、11为右液压传感器、12为旋转台、13为高压管、14为重物、15为巷道顶板、16为底板、17为下侧障碍物、18为上侧障碍物(17、18均为井下其他设备)、p1为左液压传感器10感应到的液压数值;p2为右液压传感器11感应到的液压数,δp=p1减p2;f为巷道顶板对起吊箱的反作用力,g为重物重力。
具体实施方式
30.实施方式一:如图2-3所示,本实用新型适合复杂场地且不易偏载的双横轨单轨吊运系统,包括单轨吊行走机构2和起吊箱3,所述起吊箱3固定在单轨吊行走机构2下方,其特征在于:起吊箱3的四角上分别垂直固定有一个液压支撑腿4,且各液压支撑腿4顶端分别设有托板5,并配有液压操控阀组(图中未示出),四根液压支撑腿4均为柱塞油缸,分别包括缸筒、柱塞、导套、密封圈和压盖,配用单轨1左侧的两个液压支撑腿的缸筒根部内腔通过高压管13相通,其右侧的两个液压支撑腿4的缸筒根部内腔通过高压管13相通。
31.所述起吊箱3下方设有横向轨道6,横向轨道6上设有电动横向滑车7,电动横向滑车7上设有电动钢丝绳绞盘8,电动横向滑车7和电动钢丝绳绞盘8分别配有驱动电机,并配有操控器(图中未示出),该操控器上有上升按钮、下降按钮、左移按钮和右移按钮,并通过有线或无线与电动横向滑车7和电动钢丝绳绞盘8的驱动电机相连,对二者分别进行控制,所述起吊箱3侧壁上设有显示屏9,并配有左液压传感器10和右液压传感器11和plc控制器,
左液压传感器10与左前或/和左后支液压支撑腿4的缸筒根部内腔相通,右液压传感器11与右前或/和右后支液压支撑腿4的缸筒根部内腔相通,所述左、右液压传感器10、11与plc控制器的信号输入端相连,所述显示屏9与plc控制器的信号输出端相连,并在plc控制器下,在显示屏9上同时显示左液压传感器10和右液压传感器11感应到的液压数值p1、p2及二者之间的差值δp。
32.所述单轨吊行走机构2与起吊箱3通过旋转台12连接,所述横向轨道6共有两条,每条横向轨道6上分别设有电动横向滑车7,电动横向滑车7上设有电动钢丝绳绞盘8。所述旋转台12配有旋转驱动马达(图中未示出),所述操控器上设有控制该旋转驱动马达的正转按钮和反转按钮。
33.如图4-6所示,本实用新型利用前述适合复杂场地且不易偏载的双横轨单轨吊运系统吊运重物的方法,包括下述步骤:
34.①
.将前述适合复杂场地且不易偏载的双横轨单轨吊运系统沿轨道移至待吊运重物14上方。
35.②
.根据待吊运重物14周边的上侧障碍物18、下侧障碍物17,旋转操作箱3,使两条横向轨道6位于上、下侧障碍物18、17上方,通过操控器将一个电动横向滑车7移至待吊运重物14上方,并将其下方的电动钢丝绳绞盘8选为主绞盘,将其钢丝绳下端固定在待起吊重物14上;而将另一个电动钢丝绳绞盘8选为调整绞盘,将其钢丝绳下端固定在待起吊重物14一侧。
36.③
.通过液压操控阀组,使四根液压支撑腿4伸展,并使其托板5均与配用巷道顶板15相接,左液压传感器10和右液压传感器11感应到的液压p1、p2数值相等,且均不低于6kg/cm2,然后操纵操控器,利用主绞盘将待吊运重物14吊起;
37.待吊运重物吊起后,受重物重力影响,与重物相邻一侧的起吊箱3一侧轻微下落,其起吊箱3另一侧上翘,上翘一侧的液压支撑腿4的缸套内的液压相应变大,此时左、右液压传感器10、11感应到的液压数值p1、p2的差值δp达到最大。这一过程中,轻微上翘的液压支撑腿4上方巷道顶板,施加的反作用力也相应加大。以单轨吊行走机构2与配用单轨1的接触处为支点,增大的反作用力f在起吊箱3上产生的力矩与重物14重力g通过横向轨道6在起吊箱3上产生的力矩相等,且方向相反,相互抵消,始终保持平衡,如此一来,在起吊重物过程中,配用单轨受到的负载的合力方向始终是竖直的,不会产生配用单轨1偏载问题,如图4所示。
38.④
.然后操纵操控器,交替使用控制主起吊铰盘和调整绞盘,并根据需要调整待吊运重物的左右方向及上下仰角,直至待吊运重物远离周边上、下侧障碍物18、17,完成起吊,如图5所示。
39.⑤
. 然后操纵操控器,使电动横向滑车7带动主绞盘及其下重物14,缓慢移向起吊箱3正下方,直至左、右液压传感器10、11感应到的液压数值的差值δp达到0.1kg/cm2以下,甚至达到0。
40.⑥
.通过液压操控阀组,使四根液压支撑腿4收缩至最短状态,然后即可借助单轨吊行走机构2,沿配用单轨1将横向轨道6及其下方重物14移至目的地附近,如图6所示。
41.⑦
.然后,通过液压操控阀组,使四根液压支撑腿4伸展,并使其托板均与配用巷道顶板15相接,左液压传感器10和右液压传感器11感应到的液压p1、p2数值相等,且均不低于
6kg/cm2;
42.⑧
.然后操纵操控器,使电动横向滑车7带动主绞盘及其下重物14,缓慢移至目的地正下方,并将相应重物14落到目的地上;
43.⑨
.然后,将主起吊铰盘和调整绞盘的钢丝绳从重物上解开,操纵操控器,使主起吊铰盘和调整绞盘的钢丝绳末端上升,并脱离地面,最后,通过液压操控阀组,使四根液压支撑腿收缩至最短状态,完成一次重物吊运过程。
44.本专利文件中kg/cm2为压强单位千克力/平方厘米的习惯写法,等同kgf/cm2。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。