1.本实用新型主要涉及取放料技术领域,特别涉及一种用于机械臂的圈型物料多方向多位置取放料机构。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。相比于传统的工业设备,工业机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业,被广泛应用于电子、物流、化工等各个工业领域之中。工业机器人作为具有较强通用性的作业设备,其作业任务能否顺利完成直接取决于夹持机构,因此机器人末端的夹持机构要结合实际的作业任务以及工作环境的要求来设计,这导致了取放料机构形式的多样化。
3.对于圈型物料,往往需要专门设计取放料机构,并将取放料机构与机器人机械臂末端连接,来抓取轴承圈进行取放料。而现有的圈型物料取放料机构往往工作方向单一,不能根据实际情况调节,灵活性境较低。
技术实现要素:
4.1.本实用新型解决的技术问题
5.本实用新型提供一种用于机械臂的圈型物料多方向多位置取放料机构,用于解决上述背景技术中提到的现有的耐久试验机一般是竖直设置设置测试装置,导致整个机构较高,无法观察机构内部运转情况,且维修检修较为不便的技术问题。
6.2.技术内容
7.为了实现上述目的,本实用新型采用的技术方案为:一种用于机械臂的圈型物料多方向多位置取放料机构,包括
8.旋转固定平板,受第一驱动件驱动进行旋转;
9.抓料部,通过支撑球杆套取圈型物料并利用压板固定,压板受第二驱动件驱动移动,第二驱动件配合连接旋转固定平板;以及
10.移动固定平板,配合连接第一驱动件,且通过伺服动力机构一驱动滑动连接手臂固定平板。
11.进一步的,所述第一驱动件包括
12.同步带轮,中部通过轴两端分别配合连接移动固定平板底面和旋转固定平板顶面;
13.伺服动力机构二,通过同步皮带驱动连接同步带轮;以及
14.连接板,用于将伺服动力机构二安装在移动固定平板底部。
15.进一步的,所述伺服动力机构二包括伺服电机、减速机和同步带轮。
16.进一步的,第二驱动件使用复动气缸;压板为v型结构。
17.进一步的,所述移动固定平板上设置有:
18.直线滑轨,用于滑动连接手臂固定平板;
19.齿条,咬合连接伺服动力机构一。
20.进一步的,所述伺服动力机构一包括伺服电机、减速机以及齿轮。
21.3.有益效果
22.与现有技术相比,本实用新型的有益效果为:
23.本实用新型提供的一种用于机械臂的圈型物料多方向多位置取放料机构,设置支撑球杆套取圈型物料,并利用压板固定,实现圈型物料的抓取;通过第一驱动件和旋转固定平板的设置,实现抓料部的角度调节;同时利用移动固定平板以及伺服动力机构一,实现物料的移动转移,便于放料。
24.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
附图说明
25.下面的附图是本实用新型的说明书的一部分,其绘示了本实用新型的示例实施例,所附附图与说明书的描述一起用来说明本实用新型的原理。
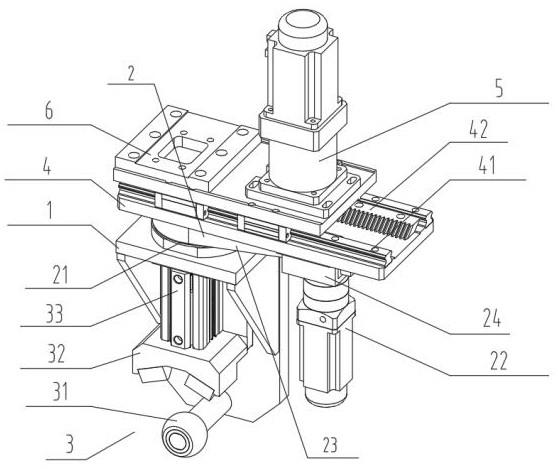
26.图1是本实用新型的结构示意图。
27.附图标记
28.1-旋转固定平板;2-第一驱动件;21-第一同步带轮;22-伺服动力机构二;23-同步皮带;24-连接板;3-抓料部;31-支撑球杆;32-压板;33-第二驱动件;4-移动固定平板;41-直线滑轨;42-齿条;5-伺服动力机构一;6-手臂固定平板。
具体实施方式
29.现详细说明本实用新型的多种示例性实施方式,该详细说明不应认为是对本实用新型的限制,而应理解为是对本实用新型的某些方面、特性和实施方案的更详细的描述。
30.在不背离本实用新型的范围或精神的情况下,可对本实用新型说明书的具体实施方式做多种改进和变化,这对本领域技术人员而言是显而易见的。由本实用新型的说明书得到的其他实施方式对技术人员而言是显而易见得的。本申请说明书和实施例仅是示例性的。
31.参照图1,一种用于机械臂的圈型物料多方向多位置取放料机构,包括旋转固定平板1、抓料部3和移动固定平板4,所述旋转固定平板1通过第一驱动件2连接于移动固定平板4底面一侧,抓料部3包括支撑球杆31、压板32和第二驱动件33,所述支撑球杆31通过螺纹连接固定在旋转固定平板1上,支撑球杆31上方设置有压板32,压板32和第二驱动件33的驱动端连接,第二驱动件33配合连接旋转固定平板1;移动固定平板4顶面通过伺服动力机构一5驱动滑动连接手臂固定平板6。
32.在一些具体实施例中,所述第一驱动件2包括第一同步带轮21、伺服动力机构二22和连接板24,其中第一同步带轮21的中部设置有转轴,转轴一端可通过轴承连接移动固定平板4,转轴另一端固定连接旋转固定平板1,伺服动力机构二22包括第二伺服电机、减速机和第二同步带轮,第二伺服电机驱动第二同步带轮转动,第二同步带轮通过
33.在一些具体实施例中,第二驱动件33使用复动气缸,复动气缸通过螺丝固定在旋转固定平板1,压板32固定在复动气缸杆上,利用复动气缸驱动压板32上下移动,实现圈型物料的压紧和松开,压板32为v型结构,更好的适应圈型物料。
34.在一些具体实施例中,在所述移动固定平板4上设置直线滑轨41,利用直线滑轨41和手臂固定平板6滑动连接;并在两个直线滑轨41中部设置齿条42,利用齿条42咬合连接伺服动力机构一5中的齿轮,齿轮由第一伺服电机驱动,伺服动力机构一5固定在手臂固定平板6上。
35.所述取料时,支撑球杆31插入圈型物料内,后通过自动化手臂动力机构提起圈型物料,同时复动气缸进气,气缸杆伸出带动v型压板32移动,使圈型物料稳定地固定在需要的位置上,完成整个取料动作;放料时按照放料机床主轴的位置坐标和角度坐标要求,伺服动力机构一5通过末端齿轮旋转带动齿条42位移,使移动固定平板4移动到达相应位置坐标,伺服动力机构二22通过第一同步带轮21和同步皮带23旋转,使旋转固定平板1旋转到达相应角度位置,使支撑球杆31和机床主轴同心,复动气缸进气气缸杆缩回,带动v型压板32移动退回,自动化手臂带动整个机构移动完成整个放料动作,使机床主轴不受圈型物料位置坐标和角度坐标影响顺利夹持零件,使零件满足加工要求。
36.以上所述仅为本实用新型示意性的具体实施方式,在不脱离本实用新型的构思和原则的前提下,任何本领域的技术人员所做出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,包括旋转固定平板,受第一驱动件驱动进行旋转;抓料部,通过支撑球杆套取圈型物料并利用压板固定,压板受第二驱动件驱动移动,第二驱动件配合连接旋转固定平板;以及移动固定平板,配合连接第一驱动件,且通过伺服动力机构一驱动滑动连接手臂固定平板。2.根据权利要求1所述的一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,所述第一驱动件包括同步带轮,中部通过轴两端分别配合连接移动固定平板底面和旋转固定平板顶面;伺服动力机构二,通过同步皮带驱动连接同步带轮;以及连接板,用于将伺服动力机构二安装在移动固定平板底部。3.根据权利要求2所述的一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,所述伺服动力机构二包括伺服电机、减速机和同步带轮。4.根据权利要求1所述的一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,第二驱动件使用复动气缸;压板为v型结构。5.根据权利要求1所述的一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,所述移动固定平板上设置有:直线滑轨,用于滑动连接手臂固定平板;齿条,咬合连接伺服动力机构一。6.根据权利要求5所述的一种用于机械臂的圈型物料多方向多位置取放料机构,其特征在于,所述伺服动力机构一包括伺服电机、减速机以及齿轮。
技术总结
本实用新型提供了一种用于机械臂的圈型物料多方向多位置取放料机构,包括旋转固定平板,受第一驱动件驱动进行旋转;抓料部,通过支撑球杆套取圈型物料并利用压板固定,压板受第二驱动件驱动移动,第二驱动件配合连接旋转固定平板;以及移动固定平板,配合连接第一驱动件,且通过伺服动力机构一驱动滑动连接手臂固定平板。本实用新型提供的一种用于机械臂的圈型物料多方向多位置取放料机构,设置支撑球杆套取圈型物料,并利用压板固定,实现圈型物料的抓取;通过第一驱动件和旋转固定平板的设置,实现抓料部的角度调节;同时利用移动固定平板以及伺服动力机构一,实现物料的移动转移,便于放料。便于放料。便于放料。
技术研发人员:许启胜 王万达
受保护的技术使用者:安徽润徽智能装备有限公司
技术研发日:2022.03.18
技术公布日:2022/6/27
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。