1.本实用新型涉及包装设备技术领域,具体地说,涉及一种小型给袋式自动取袋开袋封口装置。
背景技术:
2.市面上确已存在给袋式包装机械,主要为旋转式多工位结构和直线式多工作结构布局,以上机械结构机身体积和尺寸相对较为宠大、笨重,而工作效率产能也不高,这些设备搬运笨重不方便灵活,占用车间场大,因工作行程长效率较难提高。
技术实现要素:
3.本实用新型的内容是提供一种小型给袋式自动取袋开袋封口装置,其能够克服现有技术的某种或某些缺陷。
4.根据本实用新型的一种小型给袋式自动取袋开袋封口装置,其包括装置本体,装置本体顶部设有料斗,料斗底部对应设有捏袋装置,捏袋装置下方设有吸袋吸嘴,吸袋吸嘴一侧对应设有翻转式袋仓,吸袋吸嘴另一侧设有封口装置;翻转式袋仓、吸袋吸嘴、捏袋装置和封口装置前方均对应一个移动运袋装置;
5.移动运袋装置连接有水平驱动装置,移动运袋装置包括左右连接的取袋装置和搬运装置。
6.作为优选,捏袋装置包括两个夹头,两个夹头分别连接能左右移动的捏杆,捏杆连接有驱动气缸。
7.作为优选,翻转式袋仓包括翻转机构,翻转机构顶部设有吸盘,翻转机构连接有旋转气缸,旋转气缸下方设有上下拉动气缸;翻转机构顶部对应设有袋仓。
8.作为优选,封口装置包括底座,底座上方设有夹紧气缸,夹紧气缸连接有夹板,夹板内侧设有封口模具。
9.作为优选,取袋装置和搬运装置分别连接有伸缩气缸,取袋装置上设有取袋吸嘴,搬运装置上设有搬运夹板。
10.作为优选,装置本体一侧设有控制器,控制器上设有触摸屏和操作按钮。
11.作为优选,装置本体前侧设有门,门上设有观察窗、把手和出料口,出料口与封口装置对应。
12.本装置通过取袋装置和搬运装置连续移动到翻转式袋仓前方、捏袋装置前方和封口装置前方,实现袋子的自动取袋、开袋和封口,十分方便。翻转式袋仓能够将袋子翻转,方便袋子的添补。本实用新型结构简单,自动化程度高,占用空间小,工作效率高,十分适用于小规模包装。
附图说明
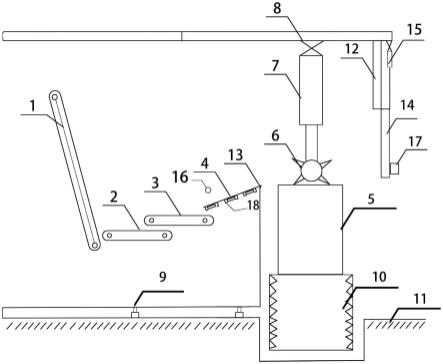
13.图1为实施例1中一种小型给袋式自动取袋开袋封口装置的结构示意图;
14.图2为实施例1中捏袋装置和吸袋吸嘴的结构示意图;
15.图3为实施例1中翻转式袋仓的结构示意图;
16.图4为实施例1中移动运袋装置的结构示意图;
17.图5为实施例1中封口装置的结构示意图。
具体实施方式
18.为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。应当理解的是,实施例仅仅是对本实用新型进行解释而并非限定。
19.实施例1
20.如图1-5所示,本实施例提供了一种小型给袋式自动取袋开袋封口装置,其包括装置本体110,装置本体110顶部设有料斗120,料斗120底部对应设有捏袋装置130,捏袋装置130下方设有吸袋吸嘴140,吸袋吸嘴140一侧对应设有翻转式袋仓150,吸袋吸嘴140另一侧设有封口装置160;翻转式袋仓150、吸袋吸嘴140、捏袋装置130和封口装置160前方均对应一个移动运袋装置170;
21.移动运袋装置170连接有水平驱动装置,移动运袋装置170包括左右连接的取袋装置171和搬运装置172。
22.取袋装置171和搬运装置172在水平驱动装置的驱动下同时移动,当取袋装置171移动到翻转式袋仓150前面时,搬运装置172正好在吸袋吸嘴140、捏袋装置130的前面,取袋装置171从翻转式袋仓150处吸取袋子后,然后移动到吸袋吸嘴140、捏袋装置130的前面,吸袋吸嘴140将袋子吸住,捏袋装置130将袋子捏开,一定重量的待包装产品从料斗120处落入到袋子里,然后,取袋装置171返回到翻转式袋仓150前面。搬运装置172将装好待包装产品的袋子夹住,移动到封口装置160前面,封口装置160对袋子进行封口。本装置能够循环进行取袋、开袋和封口操作,十分方便,适合小范围包装操作。
23.捏袋装置130包括两个夹头131,两个夹头131分别连接能左右移动的捏杆132,捏杆132连接有驱动气缸。
24.夹头131用于夹住袋子顶部边缘,驱动气缸驱动两个捏杆132向内移动,夹头131随之移动,这样,袋子顶部开口就被撑开,产品就能方便的落入到袋子里。
25.夹头131通常设置有两个夹嘴,其中一个夹嘴转动安装且这个夹嘴由气缸带动转动,通过夹嘴的转动来实现夹头131的开合。
26.翻转式袋仓150包括翻转机构151,翻转机构151顶部设有吸盘152,翻转机构151连接有旋转气缸153,旋转气缸153下方设有上下拉动气缸154;翻转机构151顶部对应设有袋仓155。
27.袋仓155内装有多个袋子,袋仓155底部为开口,当旋转气缸153带动翻转机构151上的吸盘152转动至袋仓155底部时,上下拉动气缸154上升将吸盘152贴住袋仓155内最下方的袋子,然后吸盘152工作,上下拉动气缸154下降,就能将吸盘152拉出,然后翻转机构151转会原位,就能将袋子转移到预定位置,方便取袋装置171取袋。
28.封口装置160包括底座161,底座161上方设有夹紧气缸162,夹紧气缸162连接有夹板163,夹板163内侧设有封口模具164。
29.夹紧气缸162驱动夹板163的开合,当搬运装置172将袋子搬运到夹板163处时,夹
板163夹住袋子,并且封口模具164对袋子进行封口。
30.夹板163包括固定板和活动板,夹紧气缸162驱动活动板进行开合。
31.取袋装置171和搬运装置172分别连接有伸缩气缸173,取袋装置171上设有取袋吸嘴1711,搬运装置172上设有搬运夹板1721。
32.伸缩气缸173的设置使得取袋装置171和搬运装置172均能前后移动,这样将袋子取出时或搬运时能够完全脱离原先的控制,不会影响其它部件。
33.搬运夹板1721包括固定部和活动部,活动部下方连接有连接杆,两者之间呈状,连接杆底部通过气缸驱动来实现活动部分的开合,这样,固定部和活动部之间形成一个大的空间,袋子底部就能进入到这个空间内,方便搬运夹板1721夹住袋子顶部,同时也方便封口模具164夹住袋子顶部。由于活动部和连接杆之间呈状,活动部就能方便的插入到吸袋吸嘴140与捏袋装置130之间的缝隙内,方便搬运夹板1721夹住袋子。
34.装置本体110一侧设有控制器111,控制器111上设有触摸屏112和操作按钮113。
35.控制器111上的触摸屏112和操作按钮113能够方便的控制本装置的自动运行。
36.装置本体110前侧设有门180,门180上设有观察窗181、把手182和出料口183,出料口183与封口装置160对应。
37.门180上的观察窗181方便查看内部的运行情况,封口装置160会先夹住封口成功的袋子,等搬运装置172移动到吸袋吸嘴140、捏袋装置130的前面后,封口装置160松开,袋子落下,并且从出料口183落出。
38.本实施例中,装置本体110底部设有带刹车的万向轮,料斗120上方对应设有进料斗,进料斗对应设有传送带,传送带上设有多个盛装盒,盛装盒内盛装有规定重量的产品。
39.本实施例所提到的“前”、“后”、“左”、“右”是相对于图1所提出的。
40.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。